2. vevő és csipogó felhelyezése a félkész gépre
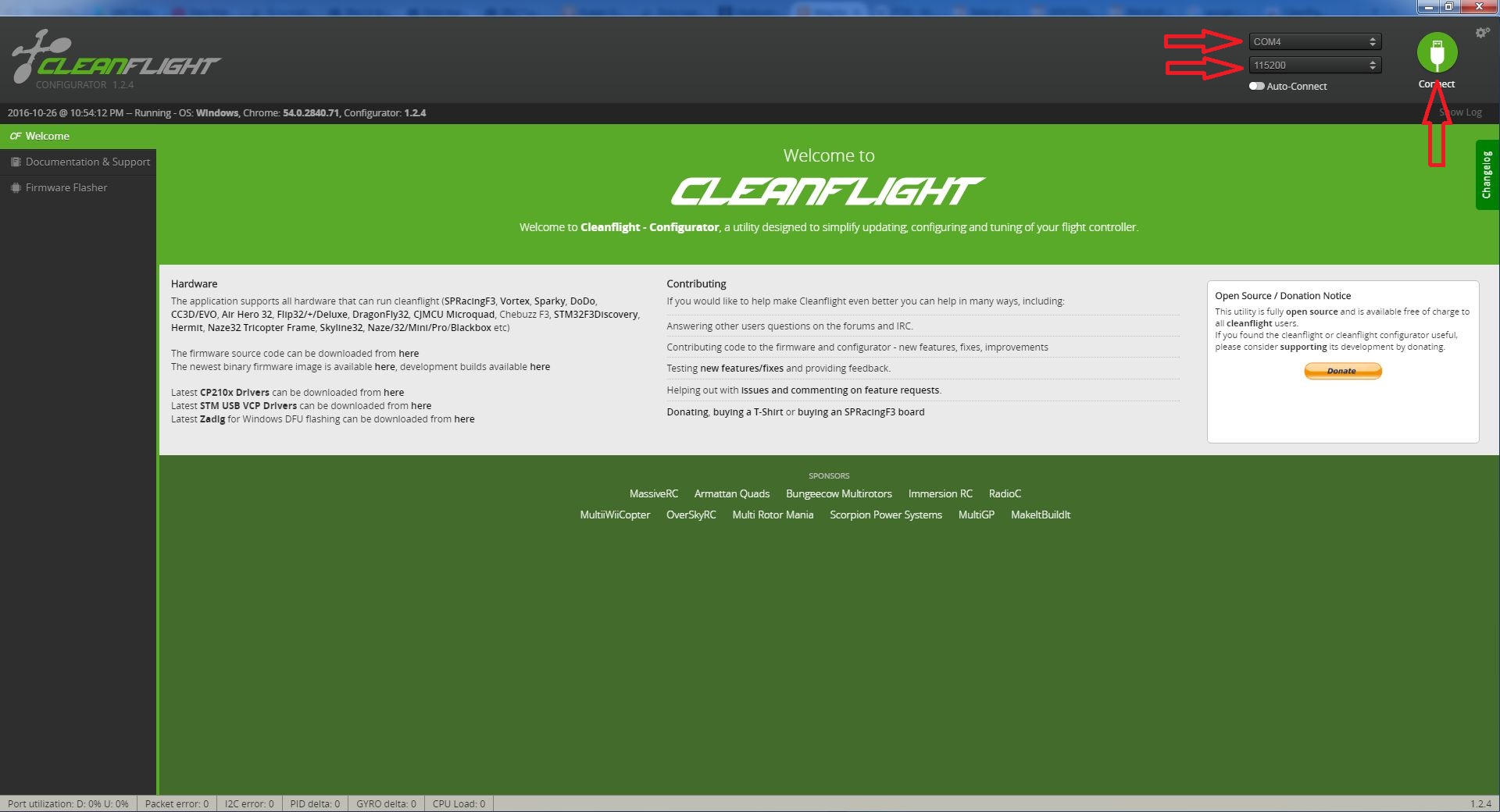
CleanFlight gyorstalpaló almenü
A legtöbb mikrogép úgynevezett ARF - Almost Ready to Fly kiszerelésben érkezik. Ez általában azt jelenti, hogy pár dolog hiányzik a beüzemeléshez, amelyek leggyakrabban a vevő, rádióadó, töltő. Lényegében olyan dolgok, amelyekből egy hobbistának már úgy is van otthon egy szakajtónyival. Ebben a fejezetben ezekből a vevő és a csipogó bekötésével fogunk foglalkozni.

Vevőből három fő típust ismerünk az szerint, hogyan kommunikálnak a repülésvezérlővel.
1. PWM - analóg kimenet, minden csatornához külön csatlakozó tartozik. Bizonyos gyártóknál csak két tüske szolgál a táplálására, másoknál minden csatornához tartozik VCC és GND tüske is. Ilyen például a FlySky iA6. Ez például repülésvezérlő mentes repülőgépeknél jelent előnyt, mert így a szervómotorokat közvetlenül a vevő vezérelheti és táplálhatja. Kvadkoptereknél eléggé visszaszorulóban van, mert már hat csatornánál is elég nagy kábelkupacot jelent, nem beszélve arról, hogy tíz csatornánál már bolognai spagettire kezd hasonlítani a gépünk.
2. PPM - analóg kimenet, de ebben az esetben csak egy adatkábelünk van a VCC és GND mellett. A legtöbb vevő maximum nyolc csatornát képes kiadni magából.
3. Serial - digitális kimenet, mely szintén csak három vezetéket használ (jel, VCC, GND), gyártónként más-más implementációval és megnevezéssel. A FlySky sajátja az iBUS, ami normál UART eszközként funkcionál, míg az FrSky / Futaba által használt SBUS invertált UART jelet használ. Az utóbbit a rev. 5 Naze32 nem komálja, így egy invertert kell hozzá venni/építeni. Az SP F3 szerencsére már maga tudja invertálni a bemeneti jelet.
Gépünk összeállításánál vegyük figyelembe, hogy a vevő soros portjára csatlakozik, így eggyel kevesebb szabad portunk marad felhasználásra.
A mikrokoptereknél a PWM nem játszik az elfoglalt hely és hozzáadott tömeg miatt. Marad tehát a PPM és serial.
PPM vevő bekötése
A Tiny QX80 repvezérlője az UART2 bemeneten keresztül fogadja a PPM jelet. Sajnos ez nem aranyszabály, gyártónként változik, hogy hol várja az FCB a PPM jelet, ezért bekötés előtt nézzük át a vezérlőhöz kapott doksit.
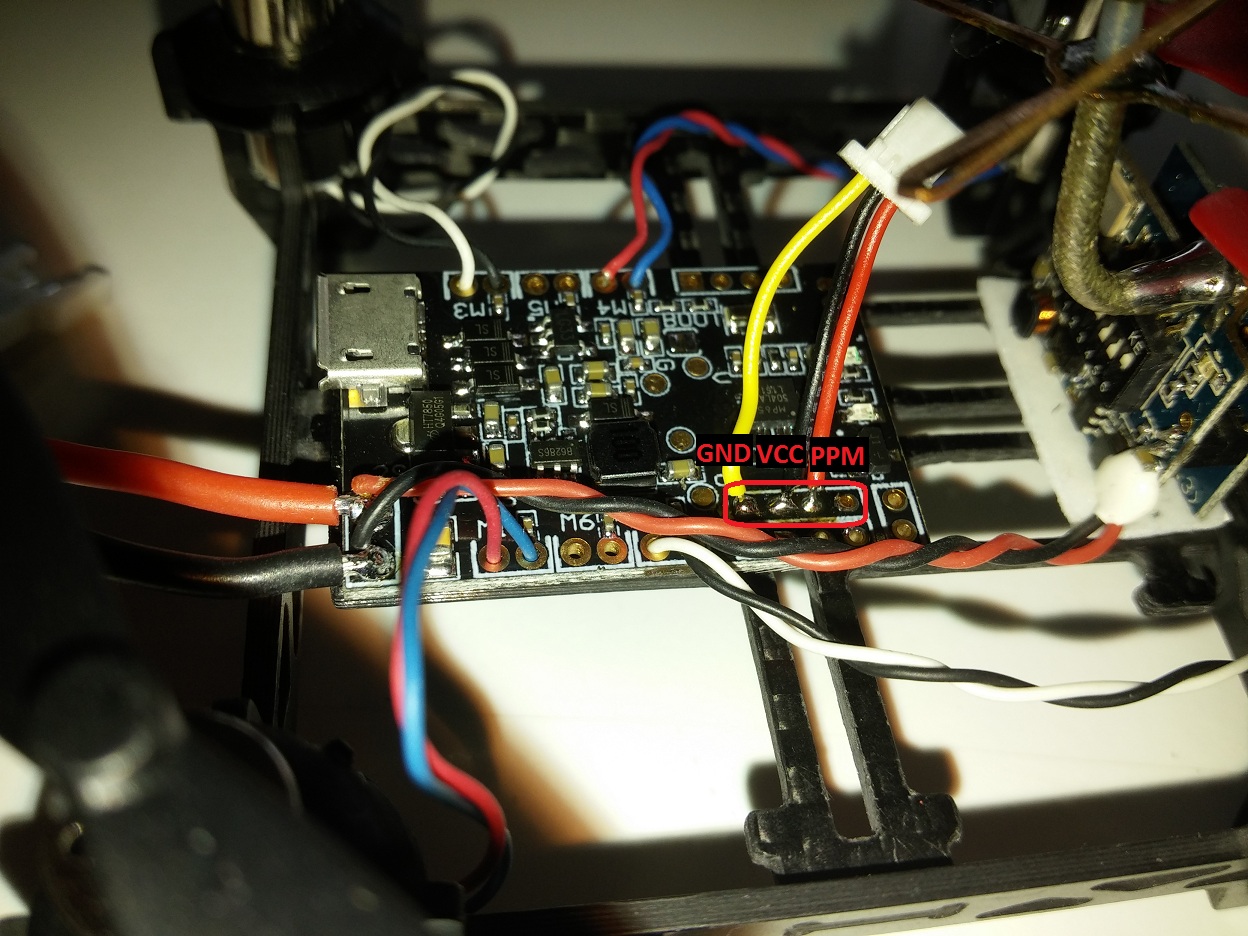
A képen piros négyszögben bal oldalt a föld, középütt a táp, jobb oldalt a jelvezeték található. Az utolsó forraszpont üresen marad. Ne zavarjon meg senkit a vezetékek színe!
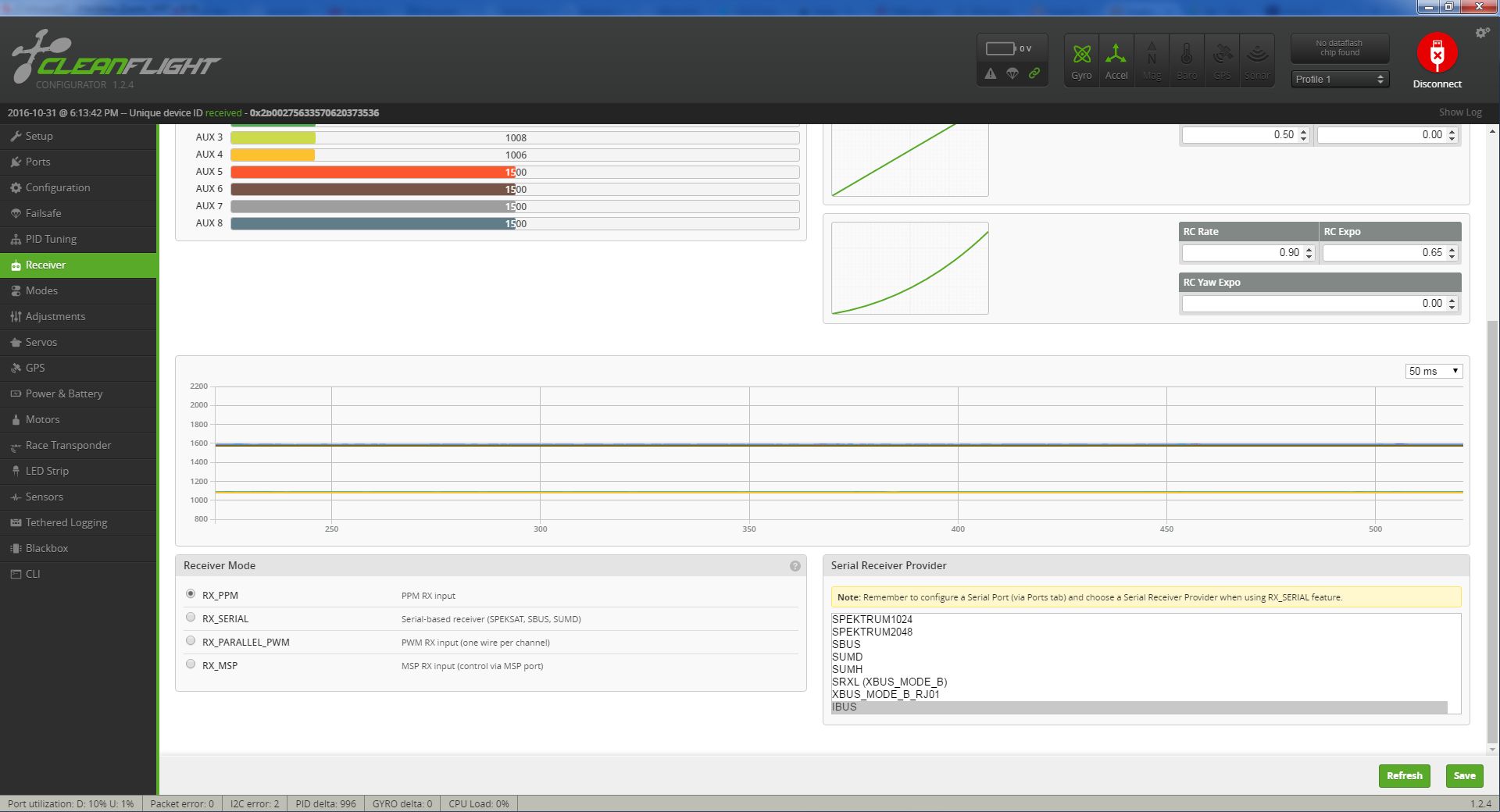
CleanFlightban kattintsunk a Receiver fülre, majd a Receiver Mode alatt válasszuk ki az RX PPM lehetőséget.
serial vevő bekötése
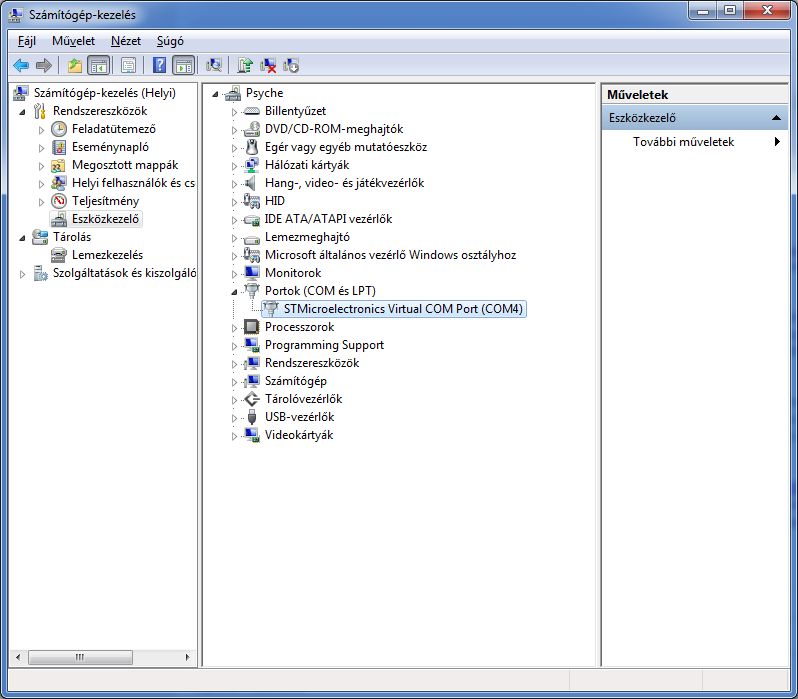
Mint tudjuk a Tiny QX80-ban SP F3 repvezérlő dobog, ami három soros portot ad nekünk. A legtöbb gépnél az elsőn keresztül csatlakozik a PC-hez, így jobb ötlet a vevőnket az UART2 vagy az UART3-ra kötni.
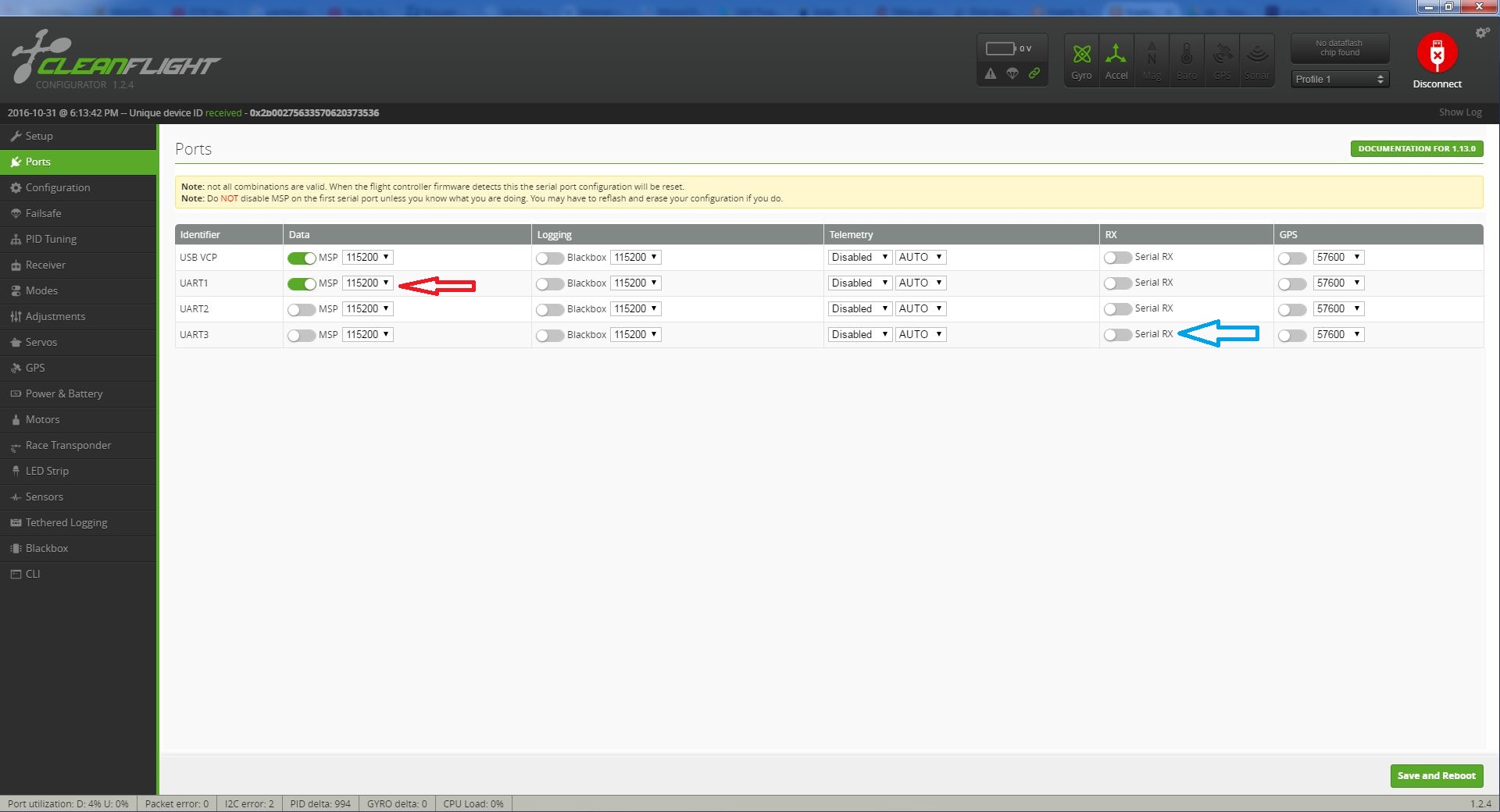
Ha egy soros portos flysky vevőt akarunk kötni az UART3-ra, akkor a PPM-hez hasonlóan kössük be a vevőnket, értelem szerűen most az UART3 portra. CF-ben először kattintsunk a Ports fülre majd az UART3 sorában kapcsoljuk be a Serial RX-et a kék nyíl mellett. Az MSP-t egyelőre ne csesztessük (piros nyíl), mert megszűnhet a kapcsolat a repvezérlővel és eléggé idő és ideggyilkos visszaállítani a kapcsolatot a géppel.
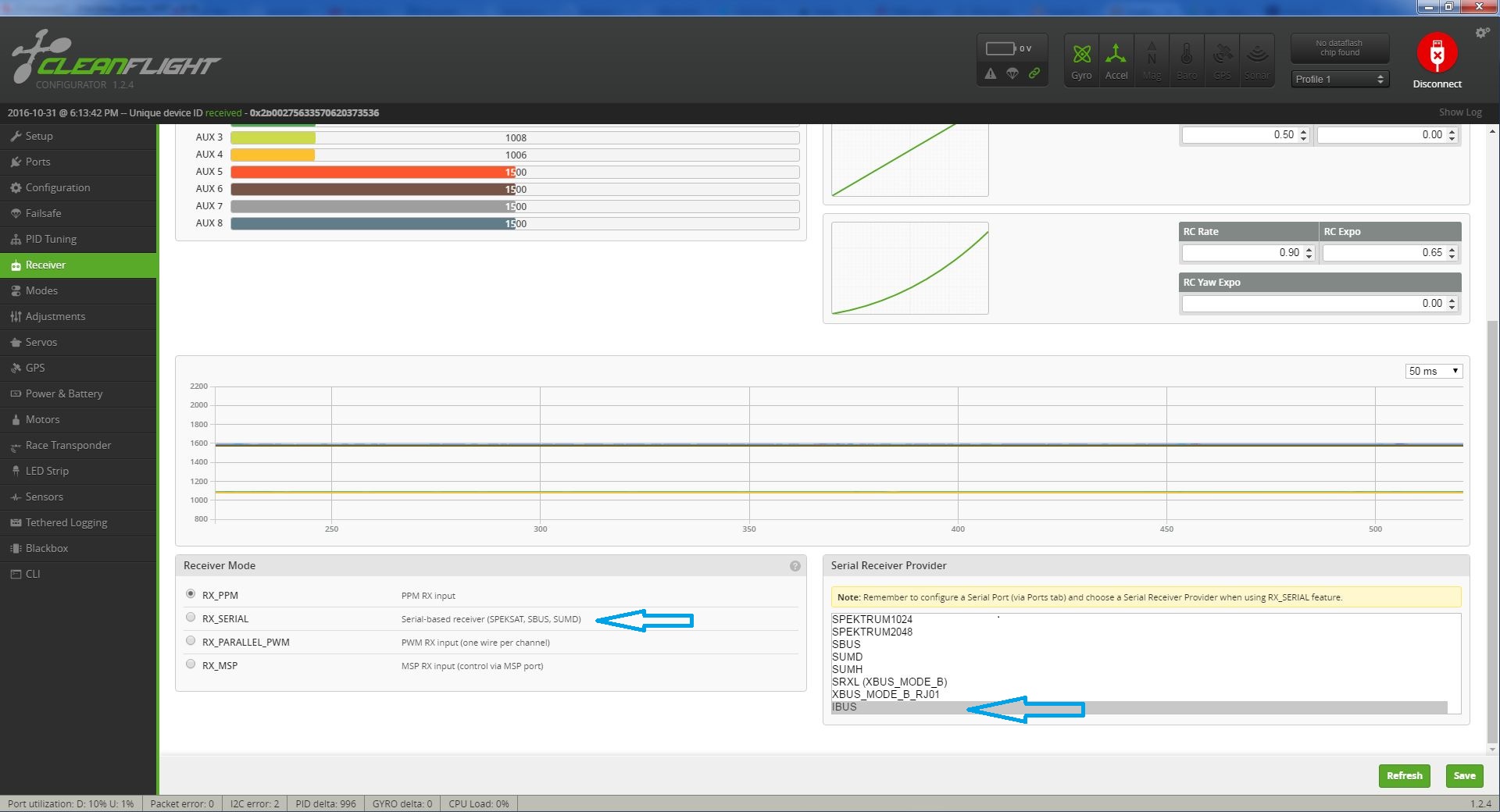
Ezután CleanFlightban kattintsunk a Receiver fülre, majd a Receiver Mode alatt válasszuk ki az RX_Serial lehetőséget, majd a Serial Receiver Provider alatt válasszuk ki az IBUS lehetőséget. A képen kék nyíllal jelölve.
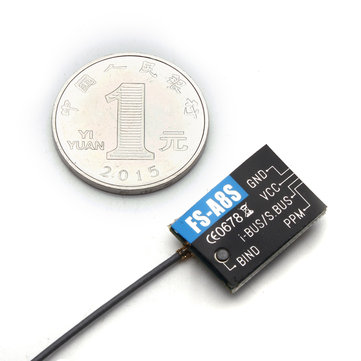
A legtöbb vevőt nemcsak egyfajta kimenettel rendelkezik. Például az 1,8 grammot nyomó, így mikro gépekre is használható FS-A8S soros porttal és PPM kimenettel is rendelkezik.
Igazi hibrid az FS-iA6B, ami rendelkezik soros porttal, PPM és PWM kimenettel is, bár kis gépekre túlsúlyos, mivel több mint 20g-ot nyom.

csipogó / buzzer bekötése
Ez nem szükséges a gép felszállásához, de higgyétek el nekem, nagyon hasznos, amikor a gépet keressük az avarban.
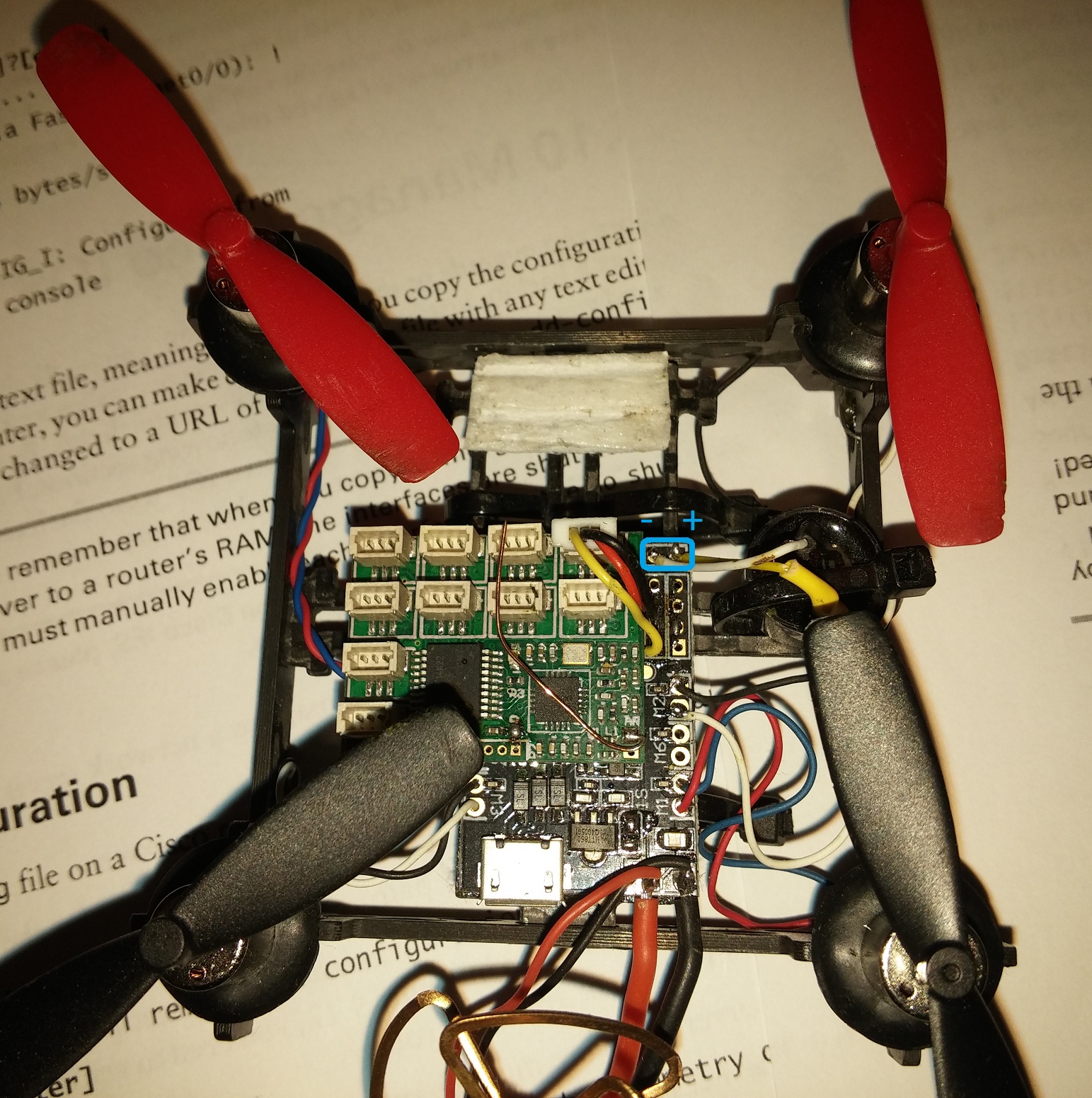
A buzzert az ábrán kékkel jelölt helyre lehet bekötni vigyázva a + / - polaritásra. Ha fordítva kötjük be, nem történik semmi, csak nem fog szólni. Arra vigyázzunk, hogy buzzerből aktívat használjunk. Ez azt jelenti, hogy a csipogó tokozása már tartalmazza a megszólaltatásához szükséges áramköri elemeket. Ha ez neked kínai, nem baj, itt van egy kínai. ;)
Vissza a főmenübe.

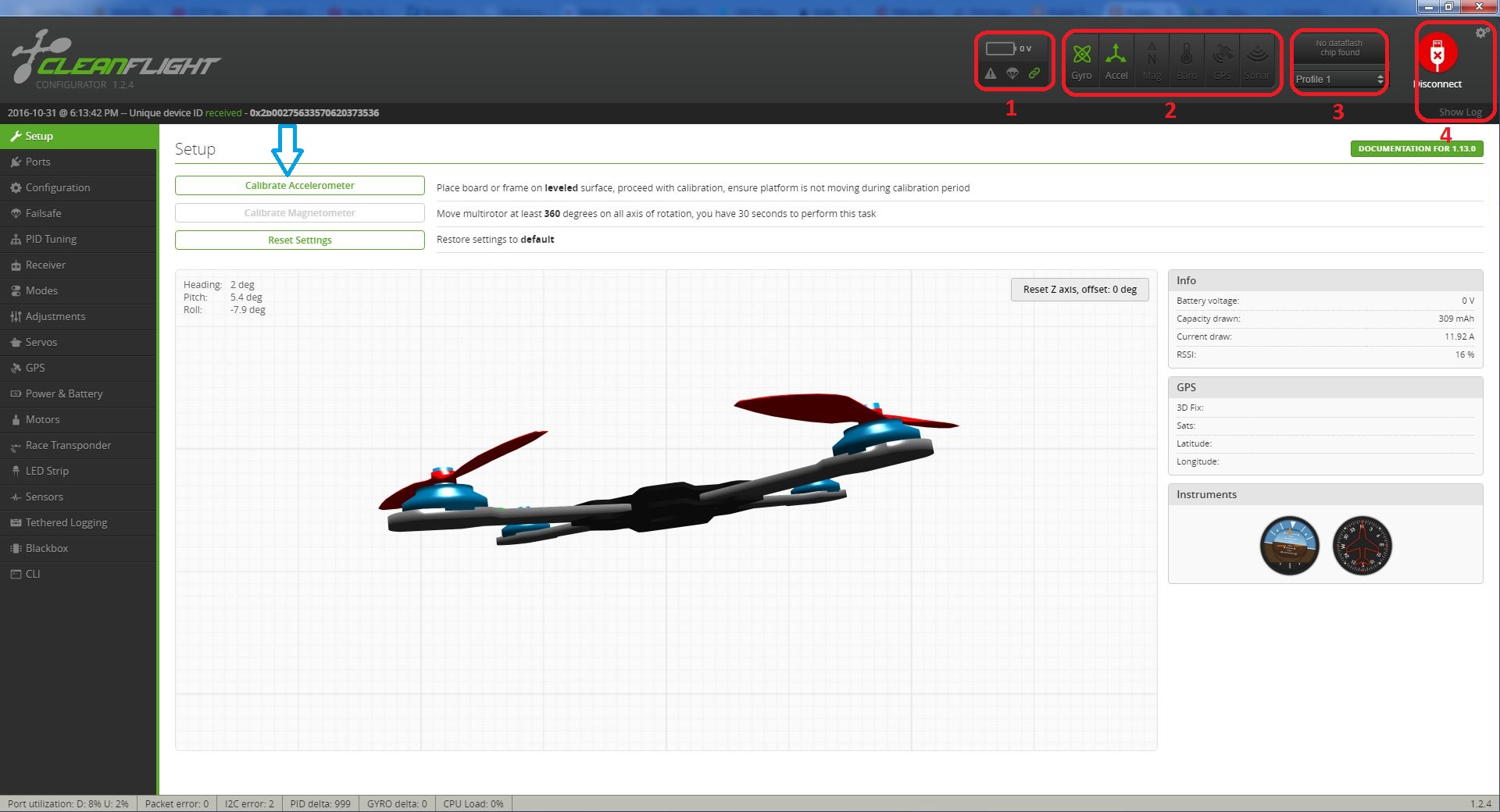 Amennyiben a kapcsolódás sikeres volt, megjelenik a Setup menü. Ennek közepén egy batár virtuális kopter fogad, ami valós időben követi a valós kopterunk mozgását.
Amennyiben a kapcsolódás sikeres volt, megjelenik a Setup menü. Ennek közepén egy batár virtuális kopter fogad, ami valós időben követi a valós kopterunk mozgását.