
Az S800 bukása és újjászületése
A mai nap egy régi adósságom fogom törleszteni, a Reptile S800 Sky Shadow személyében, ami majdnem olyan peches egy légi teremtmény mint a Hindenburg. Majdnem, mivel emberéletet (eddig) nem követelt, azonban a tűz őselem helyett a maradék hárommal szemben maradt alul.

Aki követi a Facebook oldalam, az tudhatja, hogy már a kezdet sem volt túl bizalomgerjesztő, ugyanis a postás egy összenyomott, formátlan kartondobozt nyomott a kezembe.





Szerencsére az EPP a legellenállóbb hab, amiből röpcsit csinálnak, a karbonmerevítők se törtek össze, a balza alkatrészek meg javíthatónak bizonyultak, így egy kis ügyeskedéssel vissza tudtam lapítani mindent, ami kellett. Az EPP ragasztásához az UHU POR-t ajánlom, ugyanis ez egy nagyon erős és rugalmas ragasztó, ami a fekete anyagon alig látszik, nem úgy mint az amerikai youtuberek által használt szerencsétlen, gagyi Goop. Egyedül az egyik csúnyán elhajolt elevonon rögzítettem a karbon rudat pár helyen pillanatragasztó + aktivátor kombóval, hogy ne kelljen lefogatnom másképp, míg az UHU POR megfogja.

Föld
A szűzrepülésnél annyira hülyén sikerült eldobnom a masinát, hogy leszakadt a jobb winglet fele. Kis UHU por és üvegszálas ragasztó megoldotta.

Szél
A második repülésnél eldurrant a propeller, ami kitépte a motort, ami meg kiszakított egy darabot a géptestből. Élesben próbálhattam ki, milyen jól tud az S800 motor nélkül vitorlázni, és egy relatíve szép leszállást hajtottam végre, ha nem számoljuk az előbb említett kiszakadt motort. :D

Még szerencse, hogy a készletben az S800 alkatrészek nem voltak letisztázva, azaz úgy rakták be őket, ahogy az öntőforma kiköpte, így volt egy marék habanyagom, amit most a javításra használhattam fel.
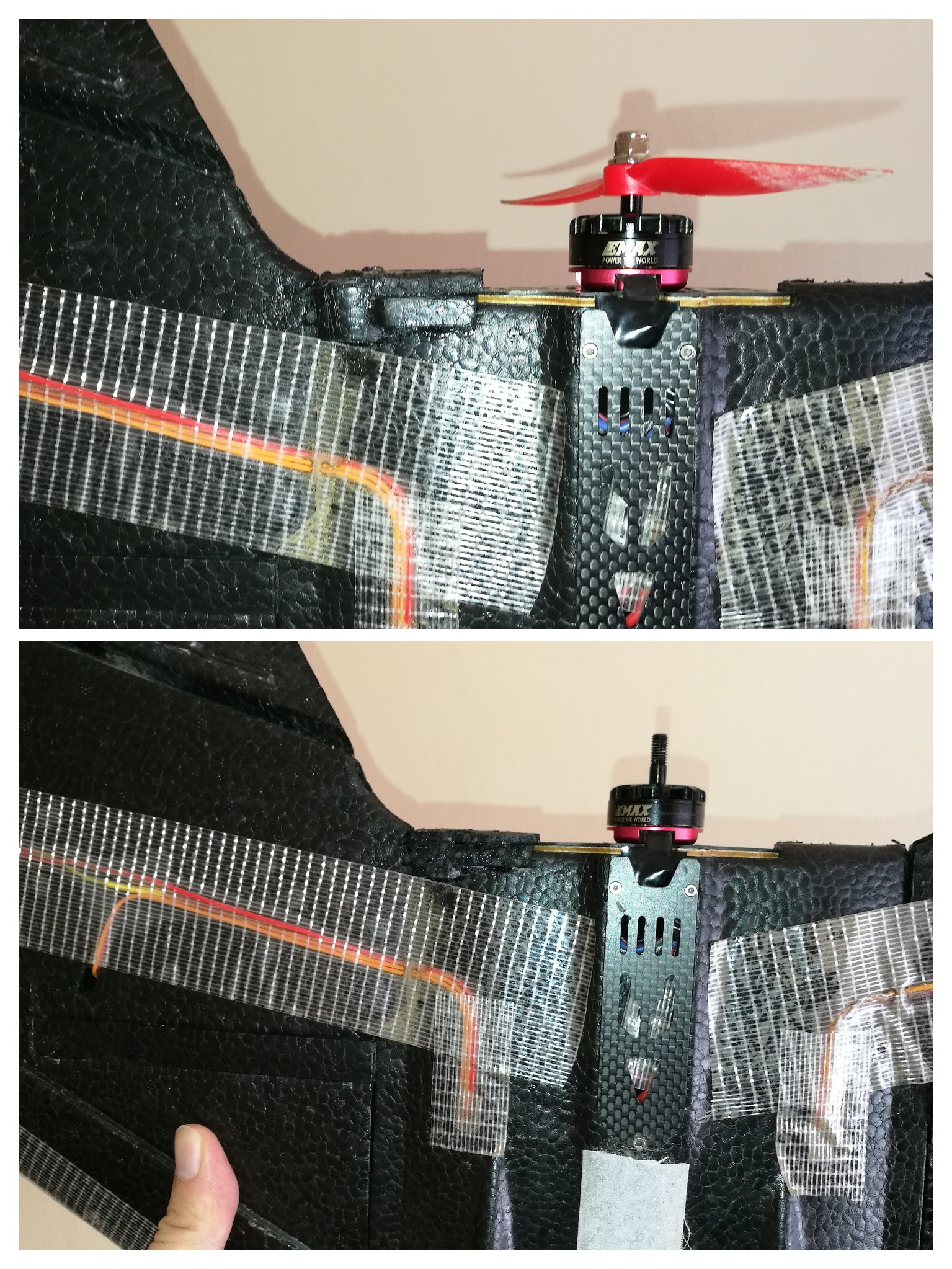
Ahogy a képeken látható, először megfelelő mennyiségű habanyagot kellett felragasztanom, amiből aztán egy éles sniccerrel vágtam, faragtam ki újra a gép hátulját. Nem mondom, hogy ügyes vagyok, de Michelangelo biztosan csettintene, hogyha meglátná. ;)
Víz
Ezután az az incidens után következett vagy három-négy repülési nap, amikor semmi különös nem történt. Már-már kezdett az az érzésem lenni, hogy mostmár minden jól fog menni, így nekiálltam finomhangolni a gépet, Repülés közben beállítottam a csűrőlapok állását a SERVO AUTOTRIM módban. Ezután kipróbáltam az AUTOTUNE módban az automata PIFF tuningot.


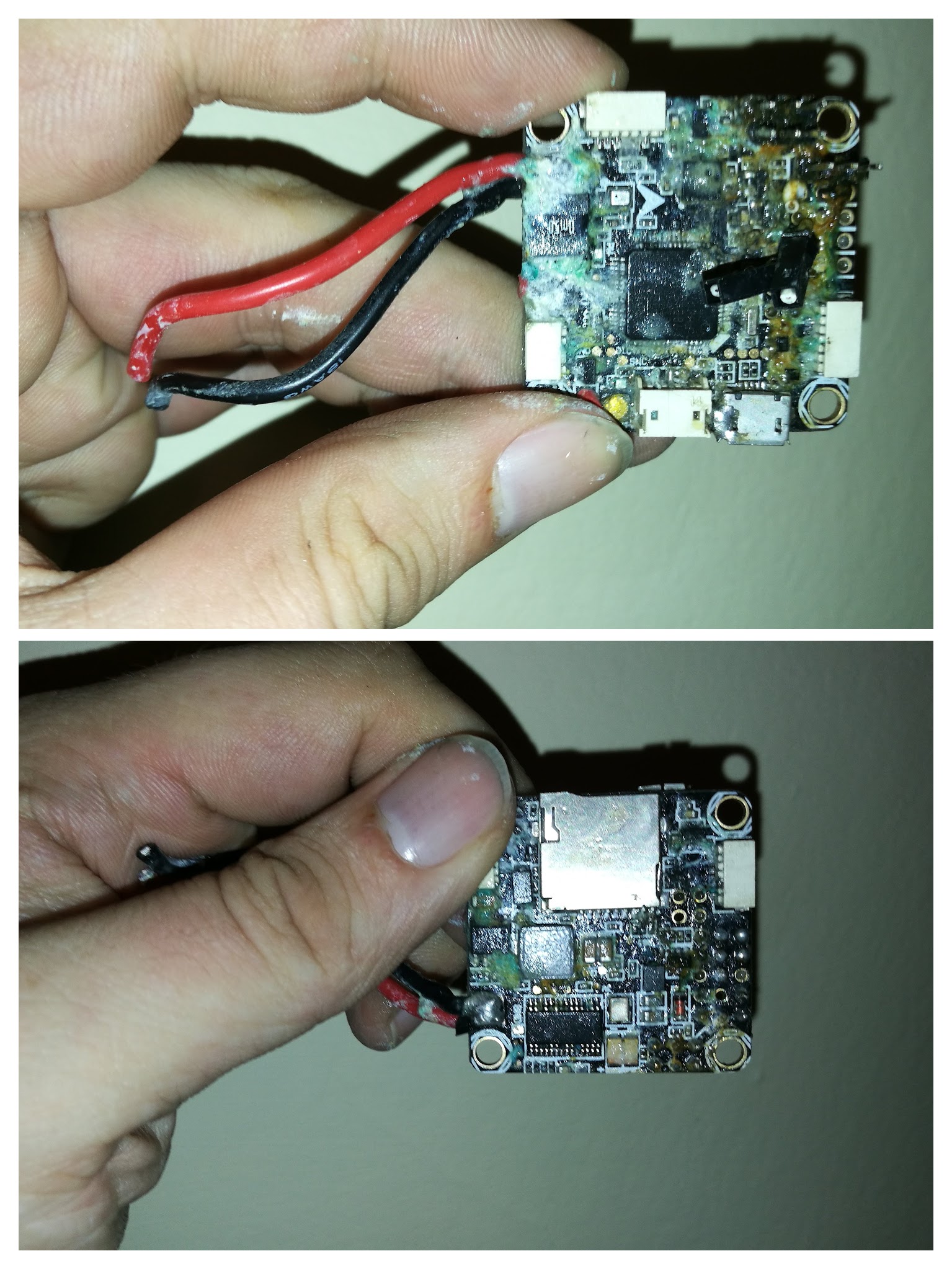
A harmadik-negyedik bukfenc után éreztem, hogy a masina olyan mint a kezesbárány, kihúzattam 150km/h-ra, majd repülés végén egy balfordulónál beszart a jobb szervó, a gép meg 70-el belerongyolt a helyi kispatakba. Mire kimentettem a masinát, addigra szinte az összes elektronika megdöglött, a vadi új Omnibus F4 és az FT48X 600mW-os videóadóval egyetemben.

Egyesített hatalmatokból én vagyok az új S800
Az utolsó baleset annyira elvette a kedvemet, hogy hagytam az egész projektet negyed évig a fenébe, mígnem két hete egy esős hétvégén nem tudtam mit csinálni, így újraépítettem az S800-at.
A váz szinte elpusztíthatatlannak bizonyult, pár kisebb szakadáson kívül kutya baja. Még a forralót sem kellett bevetnem.
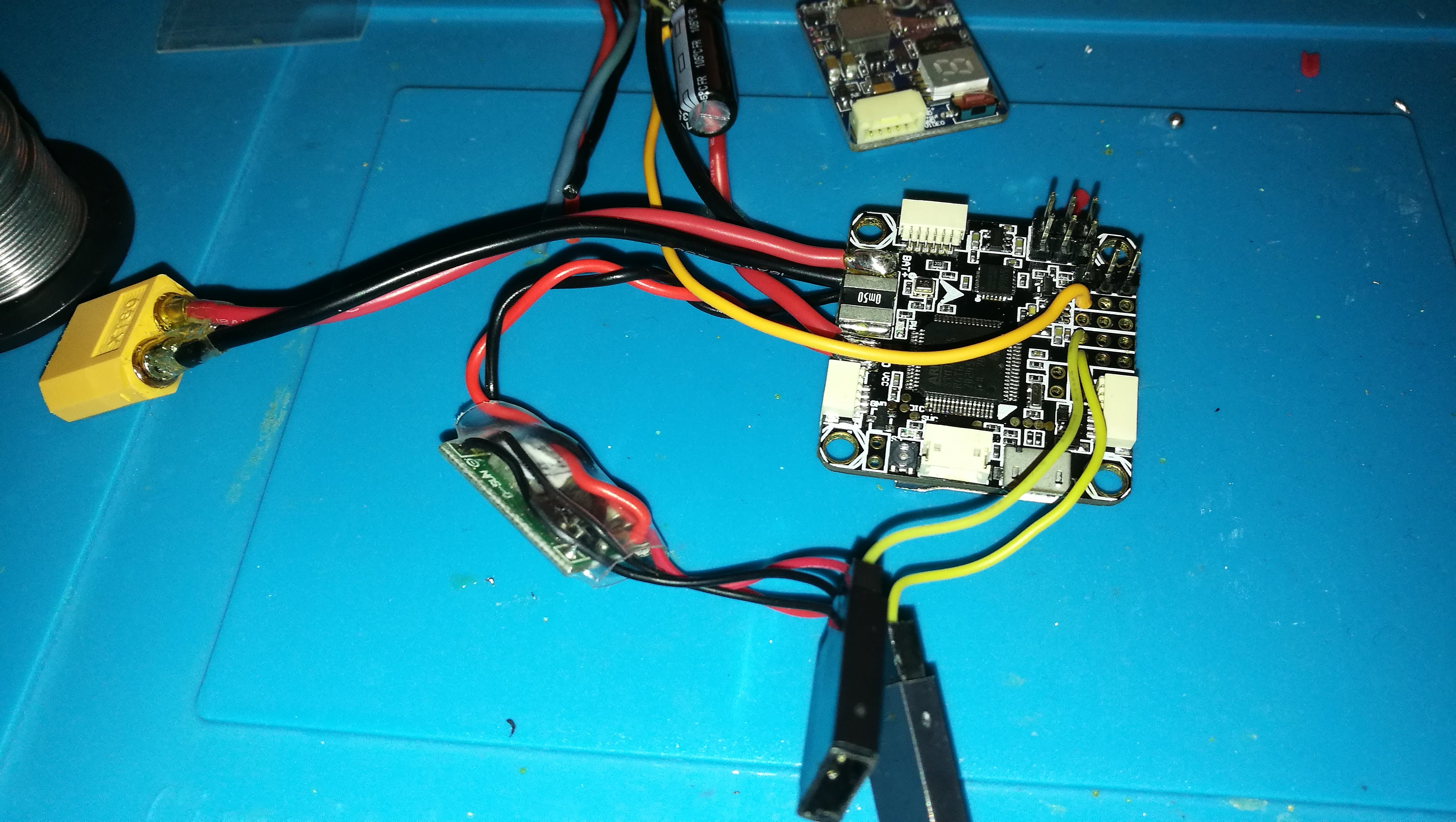
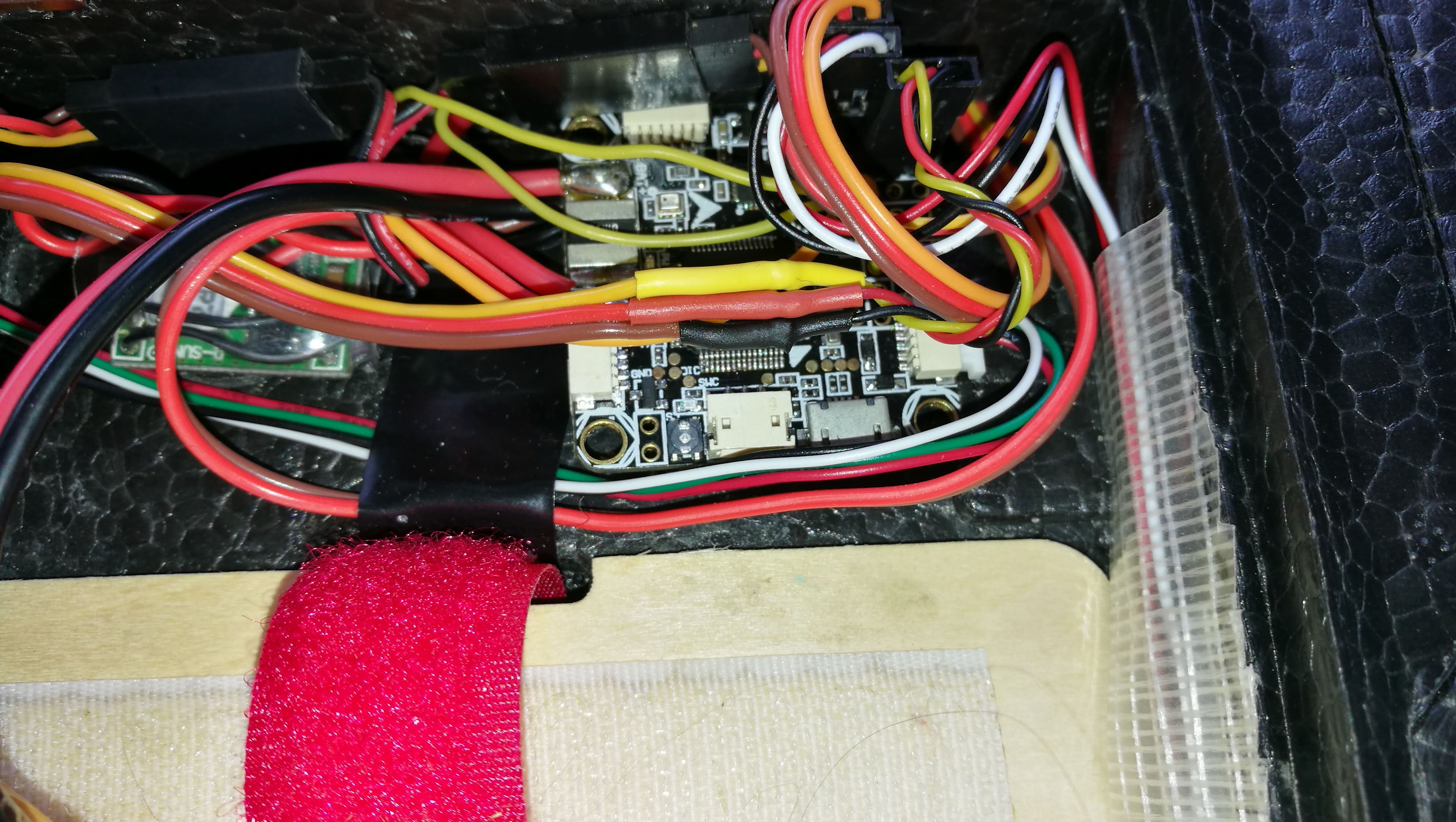
A fiók alján volt egy másik Omnibus F4 pro V2, de időközben kijött az iNAV 2.0, így az került a fedélzetre az 1.9 helyett. A 2.0 konfigurátora picit még bugos, ezen kívül viszont eléggé tetszik. Berepülés után majd írok róla egy hosszabb cikket.
Az incidens után hagytam a fenébe a noname kék szervókat, és vettem helyettük digitális, fém fogaskerekes Emax ES08MDII-ket. Ezek 9g helyett 12g-ot nyomnak, de az a 2X3g plusz súly nem számít a nagyságrendekkel nagyobb megbízhatóság miatt. És ezek a szervók milyen szépen dolgoznak, mily csöndesek! Kész öröm őket hallgatni.
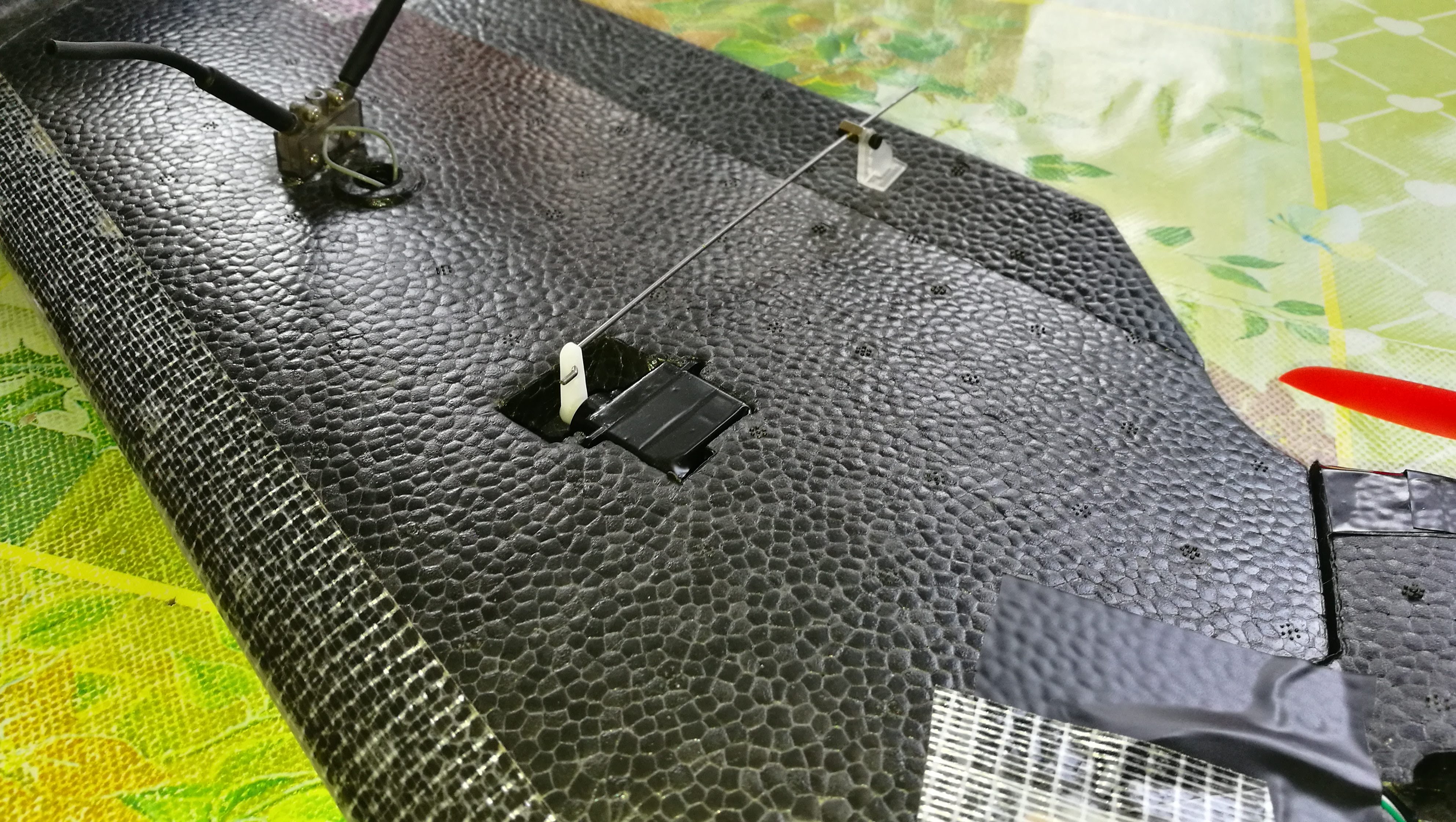
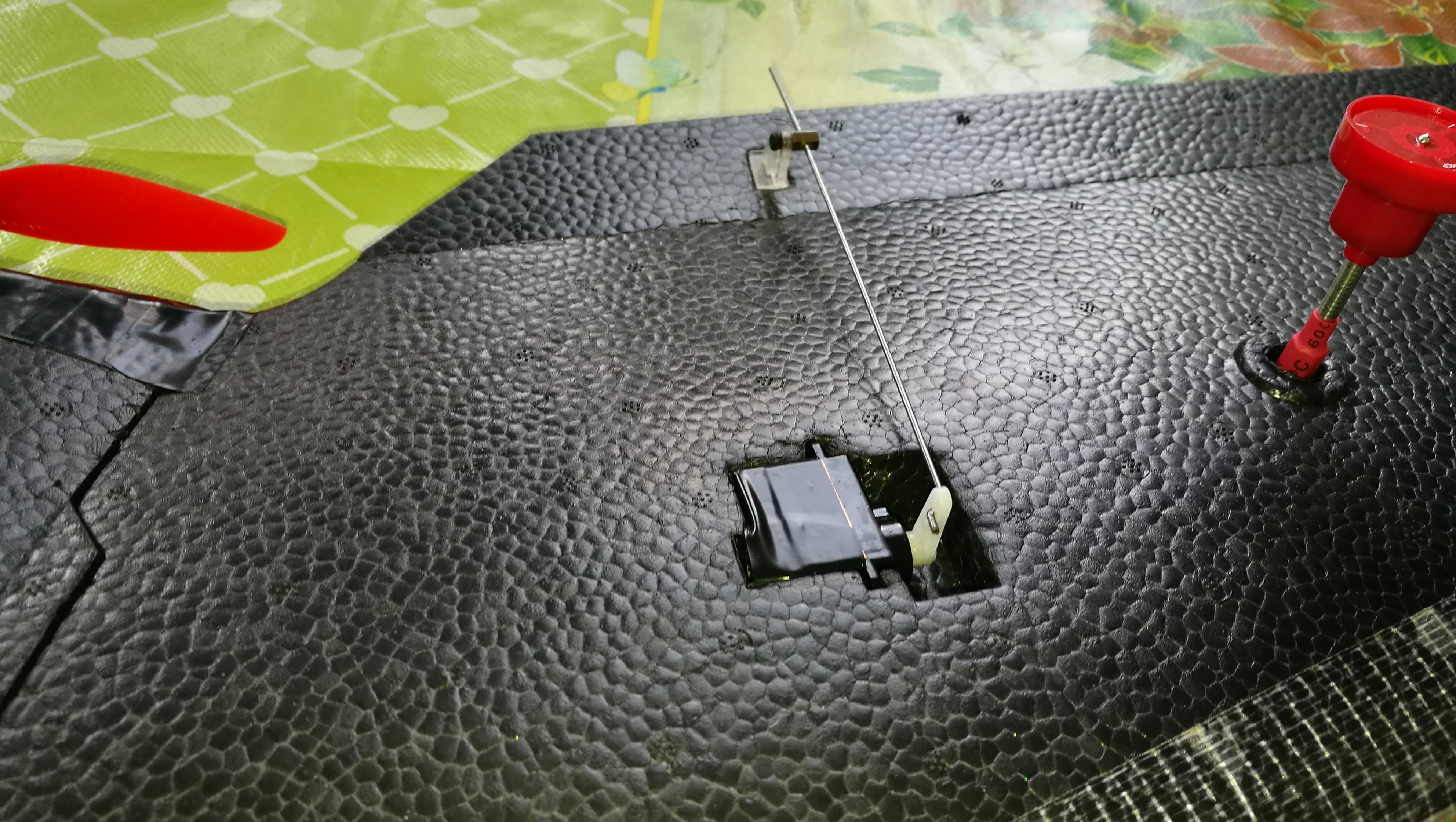
Az iNAV ajánlása szerint a szervókat a repülésvezérlőtől külön etetem egy 5V-os UBEC-el. Beépítés után bukkantam erre az írásra, ami azt taglalja, hogy elég leforrasztani egy diódát, és lehet az eredeti szervótüskéket is használni a külső UBEC-el.
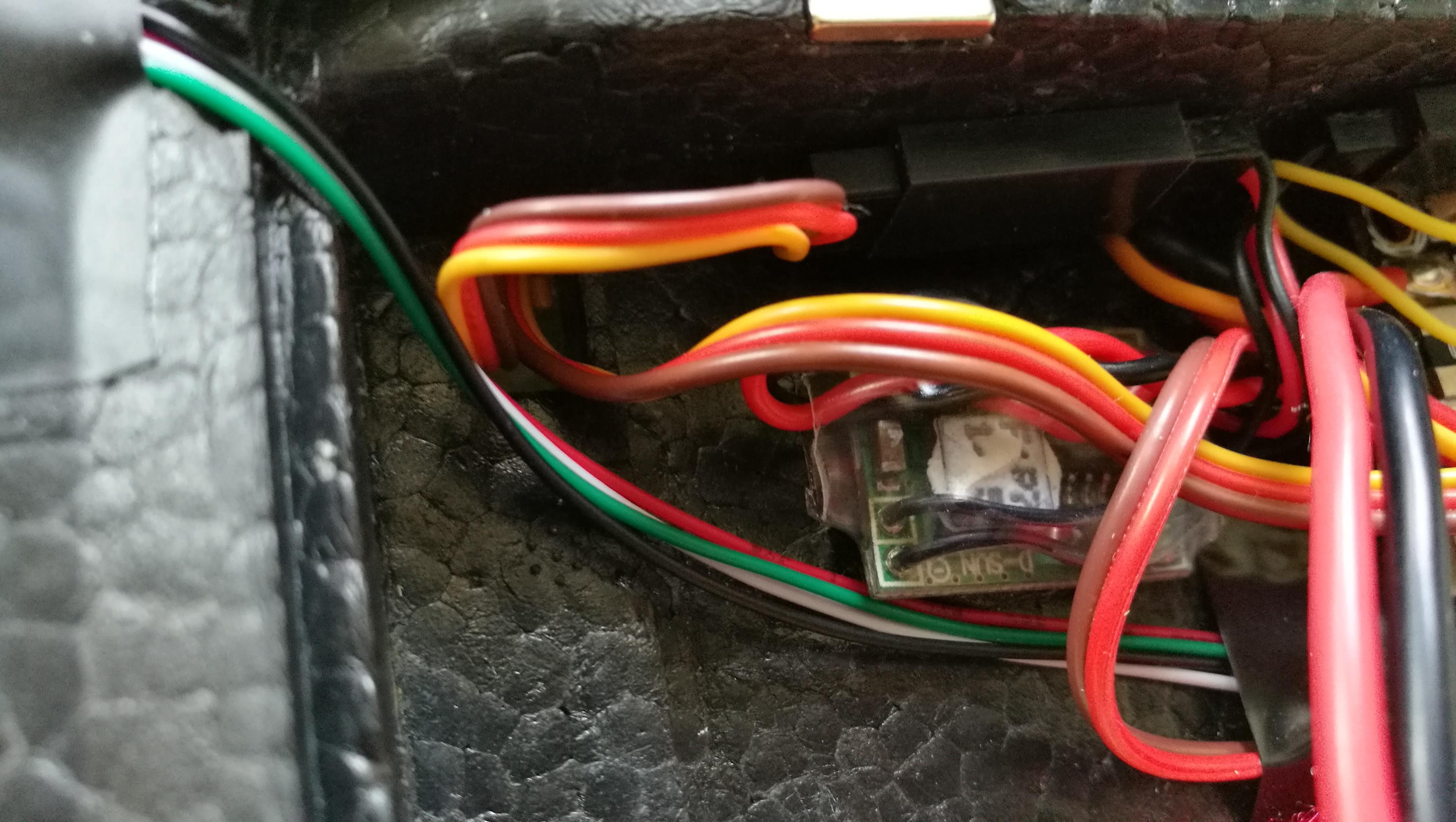
A megpucolt iA6B rádióvevő a jobb szárnyban kapott helyet, ami az Omnibus SBUS portjára csatlakozik. Azért oda, mert az i6 táv legújabb firmware modja után a legtöbb Flysky vevő képes SBUS jelet is kiadni magából, én meg nem akartam JST-SH dugaszt forrasztgatni a nem invertált UART1 bemenethez.
A 600mW-os videóadó a bal szárnyban helyezkedik el. Mivel L végű pagoda antennát raktam rá, így spóroltam pár grammot, és az antenna nem is lóg ki annyira mint anno a normál méretű Aomway antenna az L alakú SMA-RP-SMA konverterrel.

Az Eachine 1000TVL CCD kamerát a videóadó szűrt 5V ágáról táplálom, de az én bektöésemben van egy csavar:
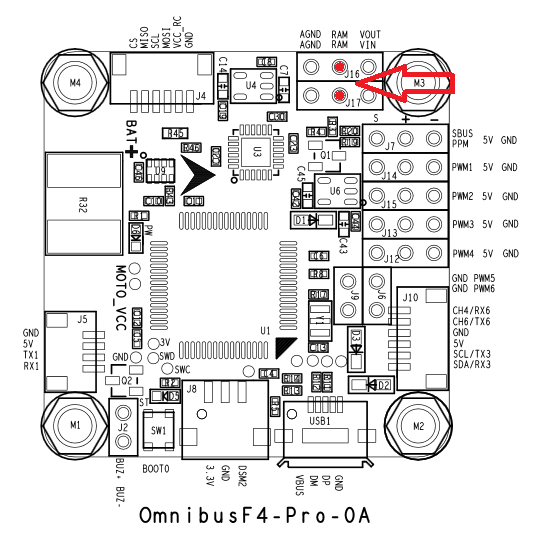
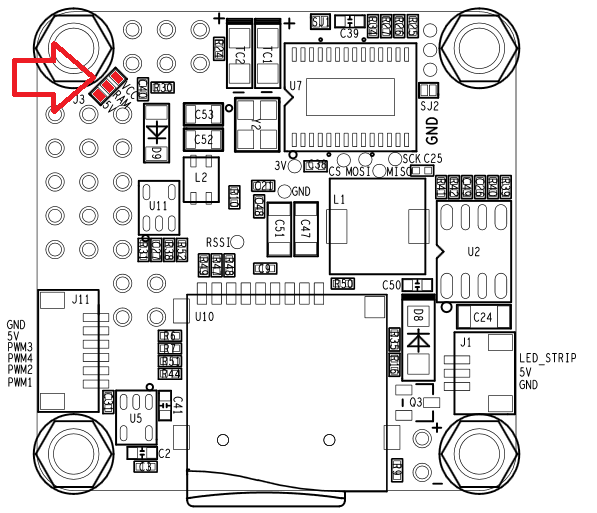
Az Omnibus-okon találhatók ugyebár a RAM tüskék. A V2-nél a kamera és VTX RAM pin vagy a tápfeszültséget vagy az Omnibus 5V tápját kapja, attól függően, hogy a RAM pin a repvezérlő alján hova van kötve. Hogyha nem kötjük sehova a RAM pin-t, az Omnibus nem táplálja a RAM pineket, és így tudtam a VTX tápját rákötni a kamerára.
A motorszabályzó az egyedüli dolog, amin spóroltam, ami egy 28A-os HGLRC ESC. El szeretném érni a géppel a 200km/h-t, amihez valszeg minimum öt cellás akku fog kelleni, így a szabi amúgy sem lesz hosszú életű, tehát üvegszálas szövetbe tekertem, ami hő- és tűzálló. Ezen kívül kapott egy 35V-os, 470uF-os low ESR Panasonic kondit, aminek vájtam egy fél centi mély járatot az ESC tartóba.
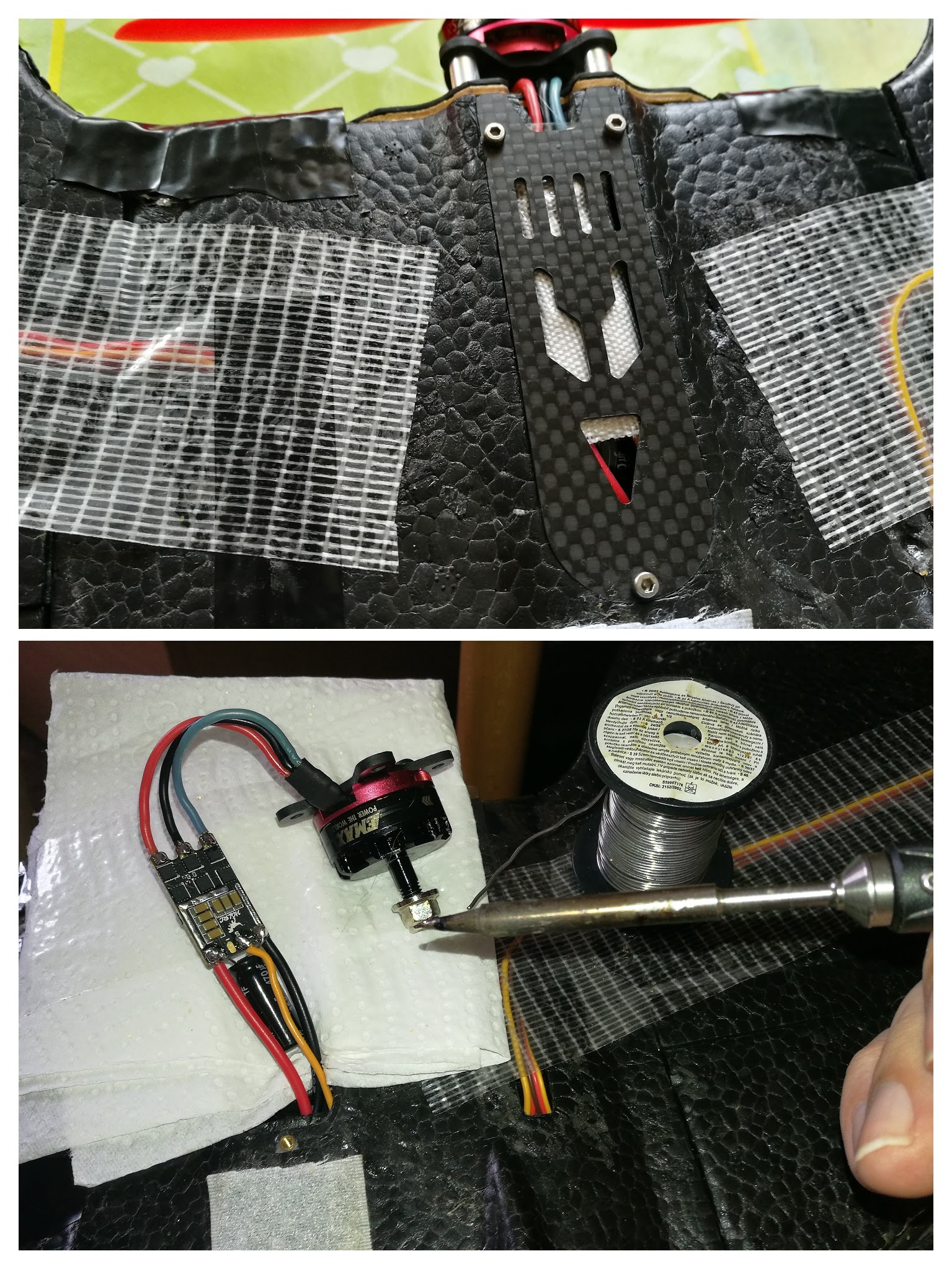
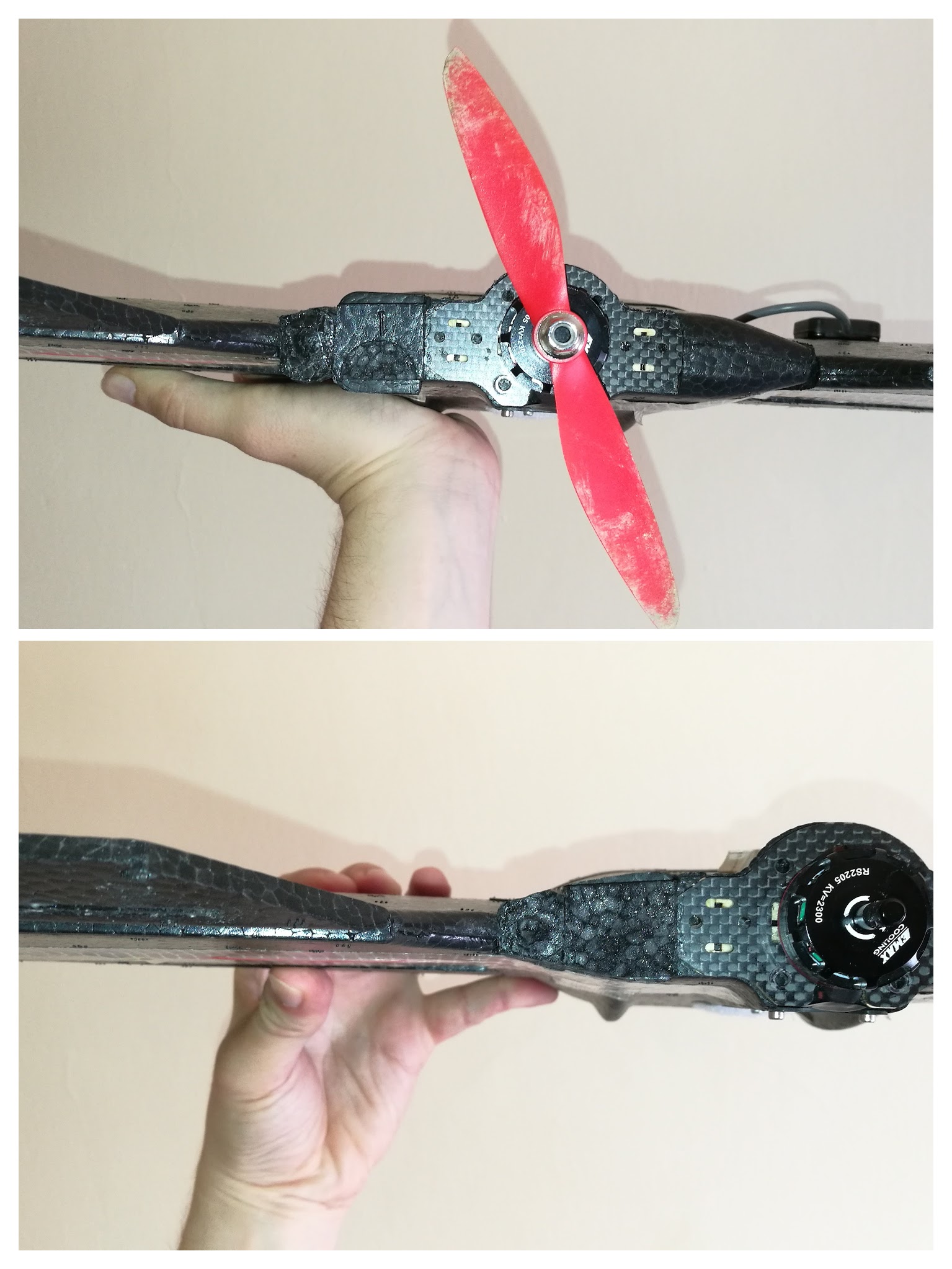
A motor a jól ismert piros seggű Emax, azaz az RS2205 2300kV-ra csévélve, mivel a többi versenykopterom is ezt használja, és így költséghatékony a móka. Hogy cserélhető legyen, kellett hozzá rendelnem egy karbon motortartót.
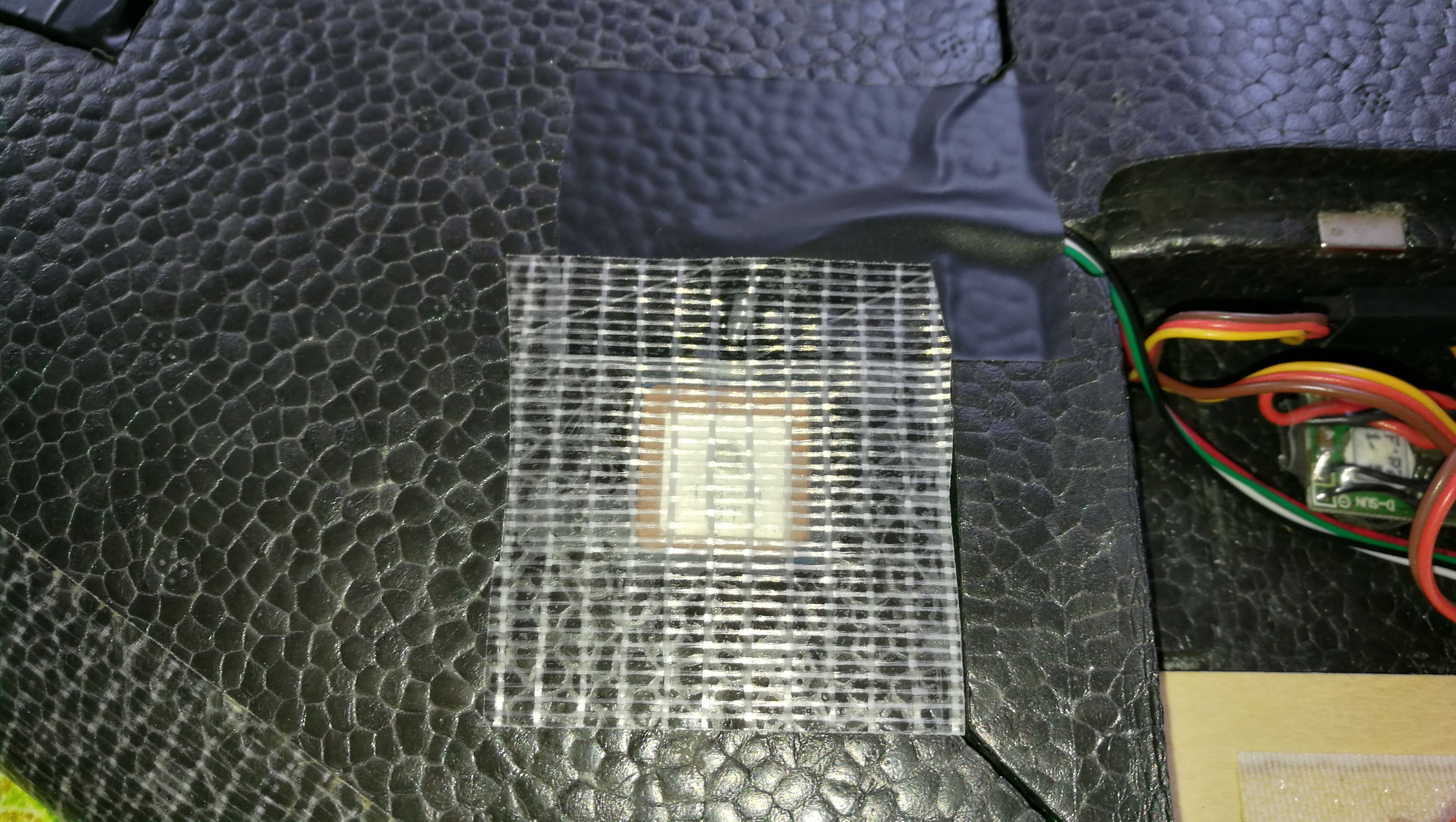
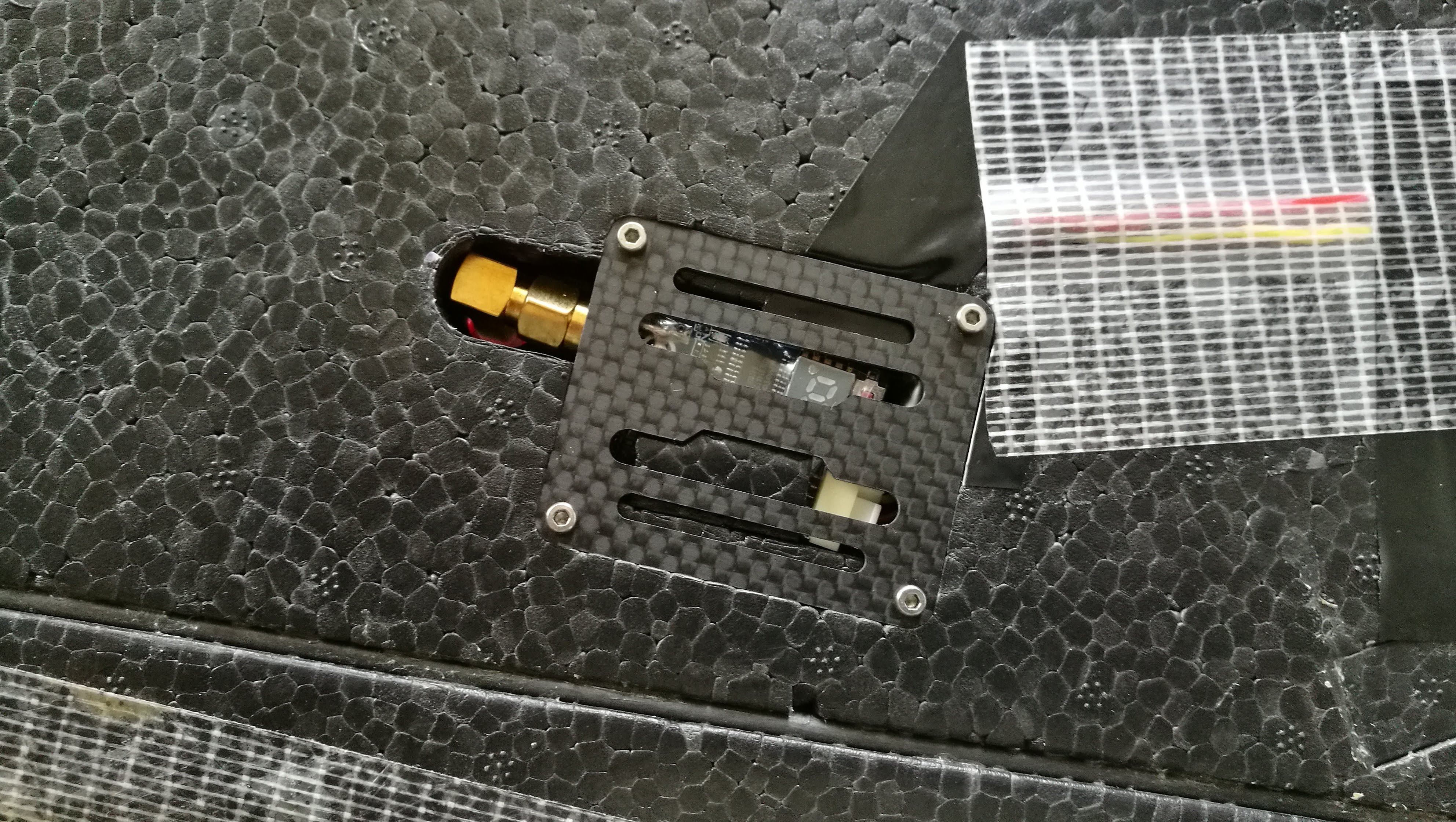
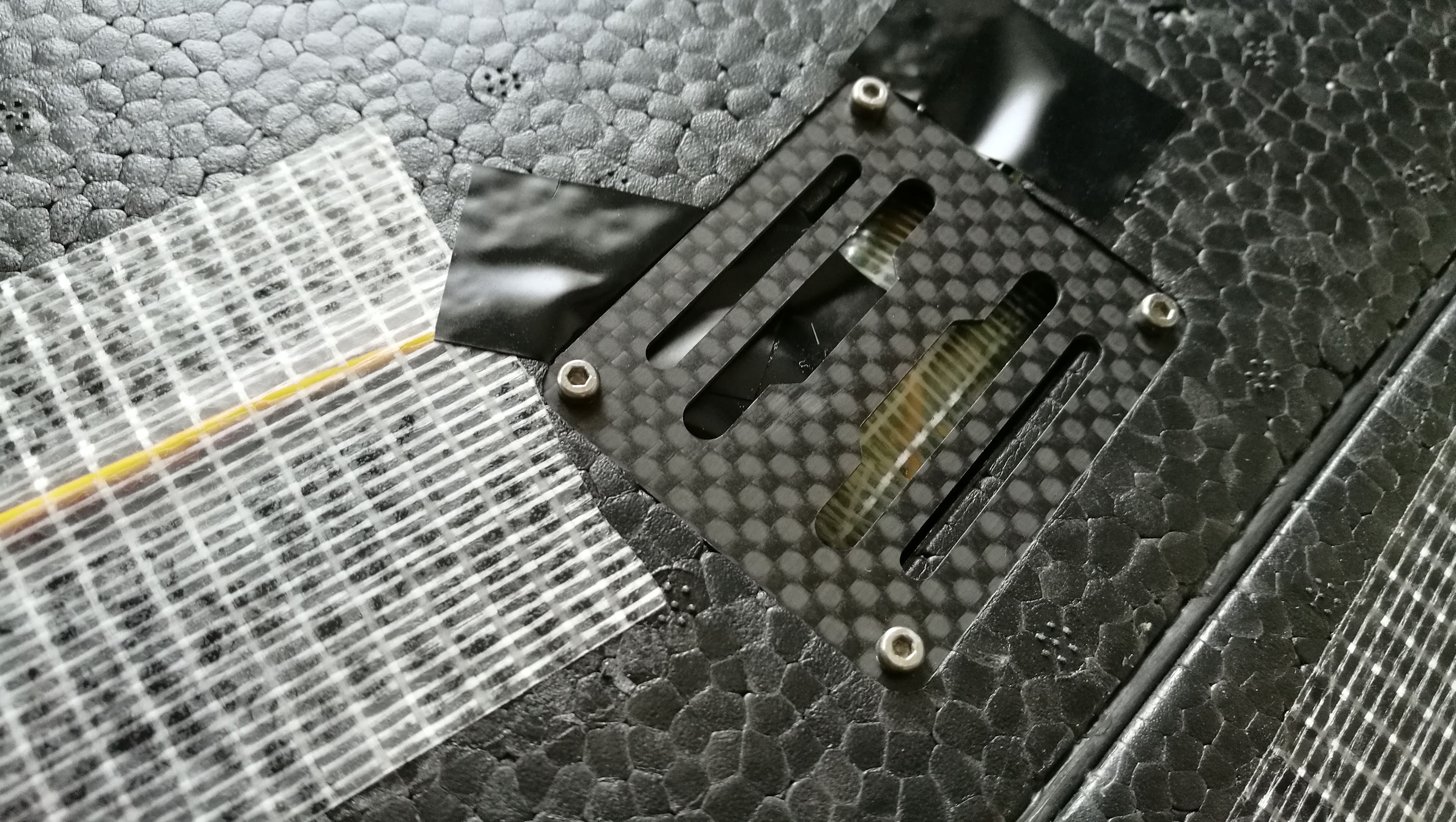
Utolsó elektronikai elemként a gép még kapott egy BN-220 GPS-t, ami a Lopakodrónban meglepően jól szolgál. Mivel nincs burkolata, így a két karbonmerevítő közé vágtam neki egy lyukat, majd leragasztottam kedvenc üvegszálas ragasztószalagommal.
A röpcsit a használati utasítás szerint egyensúlyoztam ki, azaz beraktam a cipelendő akkut, majd a szárnyat 12 centivel az orr résztől alátámasztottam. Az ajánlott 70g helyett 88g-al volt hajlandó a gép felvenni az egyensúlyi helyezetet. Az összehasonlítás kedvéért a GoPro Hero 4 83g a Session 4 74g, a Runcam 3S pedig 70g.

Mivel röpcsikbe szánt nehezéket csak nemrég szereztem, ezért a közelmúltig az orrsúlyt egy ólomdarab és egy vascső szolgáltatta. Elég fapados megoldás volt, de működött. :D

Okoskodás az S800 egyensúlyi helyzetéről és az elevonok állásáról.
Az RCGroups vonatkozó topicjában azt ajánlják, hogy az elevonok kb. 4mm-rel emelkedjenek a szárny kilépőéle fölé. Viszont azt vettem észre, hogyha a gyári ajánlás szerint egyensúlyozzuk ki a gépet, akkor picit orr nehéz lesz a gép, tehát egyenes repüléshez:
a. pár mm-el jobban meg kell emelni az elevonokat - kezdőknek ezt ajánlják
b. pár g-al csökkenteni kell az orrsúlyt, úgy hogy kb 13cm-el az orrtól támasztjuk alá a szárnyat, és vízszintezzük ki a gépet - haladóknak ajánlott
Végül következik egy méretes képgaléria, amiben az S800 a konyhaasztalon látható bevetésre készen.





Mivel az építésre késztető eső után több mint egy hétre lebetegedtem, így a masina még vár a berepülésre. Remélem csakhamar lesz alkalmam kipróbálni a gépet, hogy megírhassam az S800 és iNAV 2.0-val gyűjtött tapasztalataim.
Ha tetszett a bejegyzés dobj egy lájkot YouTubeon vagy Facebookon! Köszi!




