Hogy készül a háztáji LopakoDrón - 4. rész
iNAV és a többiek
A Cleanflight és Betaflight elég mostohán bánik a merevszárnyú repülögépekkel, a navigáció sem valami fényes, így a GPS-el felokosított röpcsim, azaz a LopakoDrón, firmwarejéért folytatott harcban kiütéssel győzött az iNAV. Nevezhetjük technikai K.O.-nak is. :D

Mivel a repvezérlő egy SP F3, nem kellett még DFU móddal szenvedni az iNAV felrakásához, elég volt az első iNAV-os cikkem alatt bemutatott módszert végigzongorázni. iNAV-ból a gép összerakásakor legaktuálisabb verziót, az 1.7.1-et kapta. Akinek nem szimmetrikusan kitérő szervóra van szüksége, az tegye fel az 1.7.2-őt.
Akinek újabb repvezérlője van és a firmware frissítéshez a DFU-val kell tökölnie, nem kell betojni, arról is írok egy cikket. Tapasztalatom van, mivel nemrég raktam fel a legújabb Betaflightot egy Emax F3 Femto-ra és az iNAV 1.7.2-őt egy Omnibus F4 V2 pro-ra.
A továbbiak élvezetéhez érdemes jóban lenni az iNAV-al. Még szerencse, hogy van róla egy bevezető cikkem. :) Amennyiben az is latin lenne a számodra, akoor mielőbb olvasd el a Cleanflight gyorstalpalóm.
Miért is jó, hogy a Z-84 az egyik legelterjedtebb repülő szárny? Mivel az iNAV-ban gyárilag van hozzá profil.
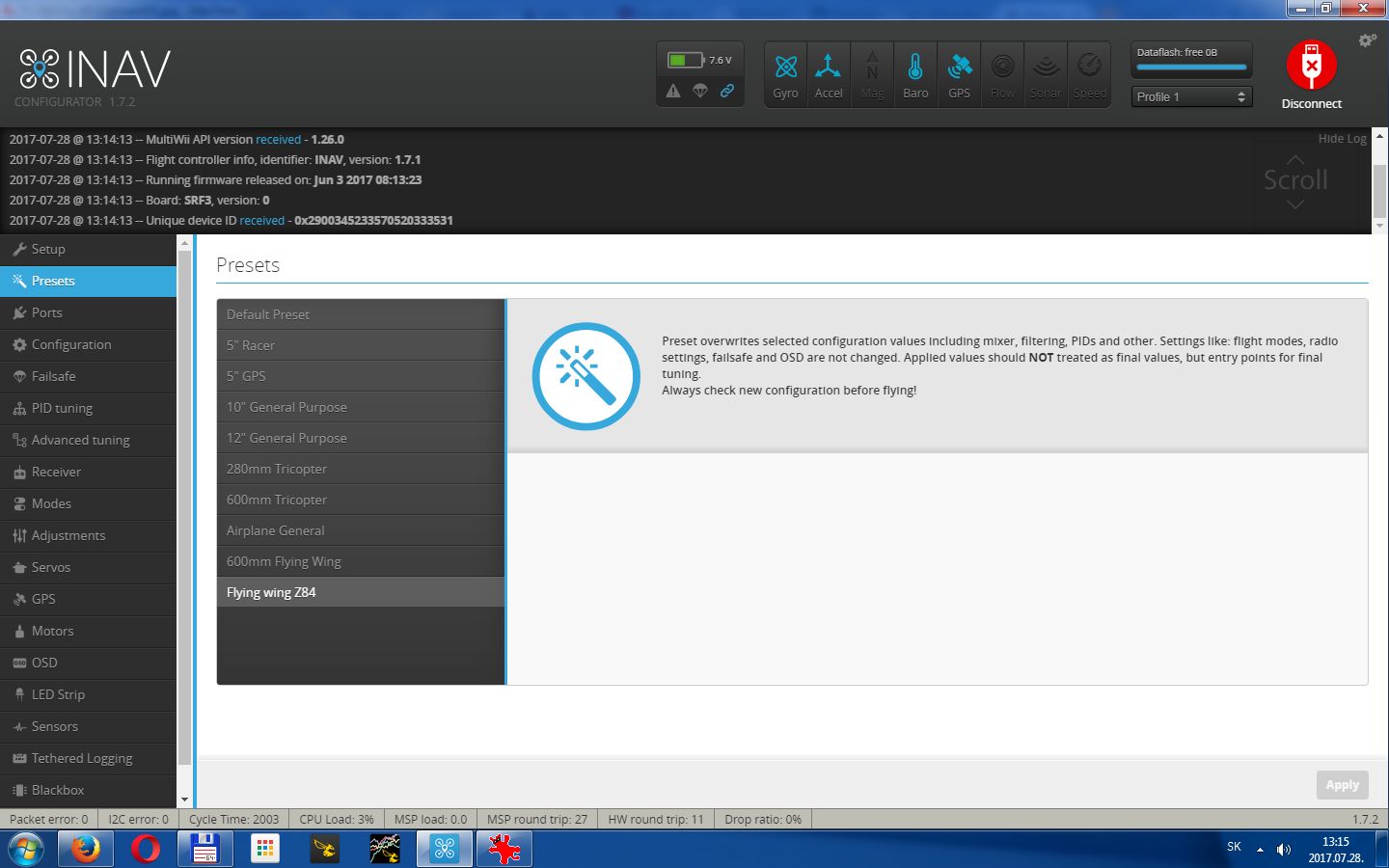
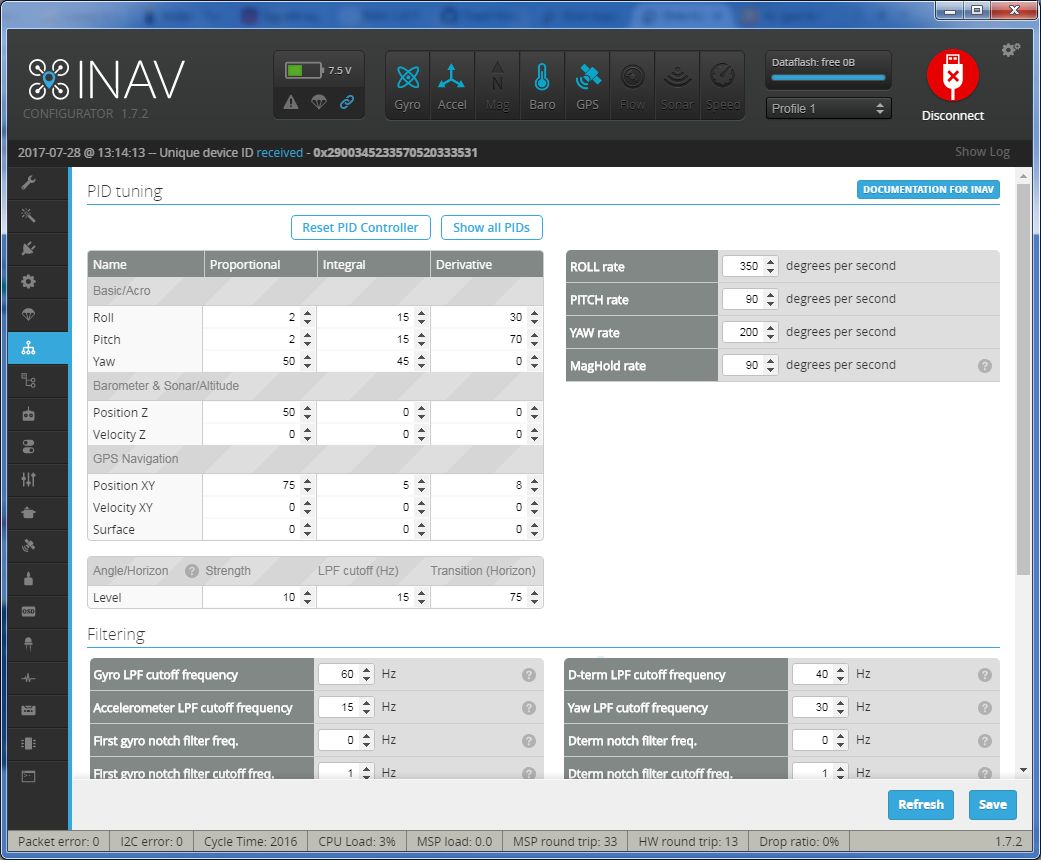
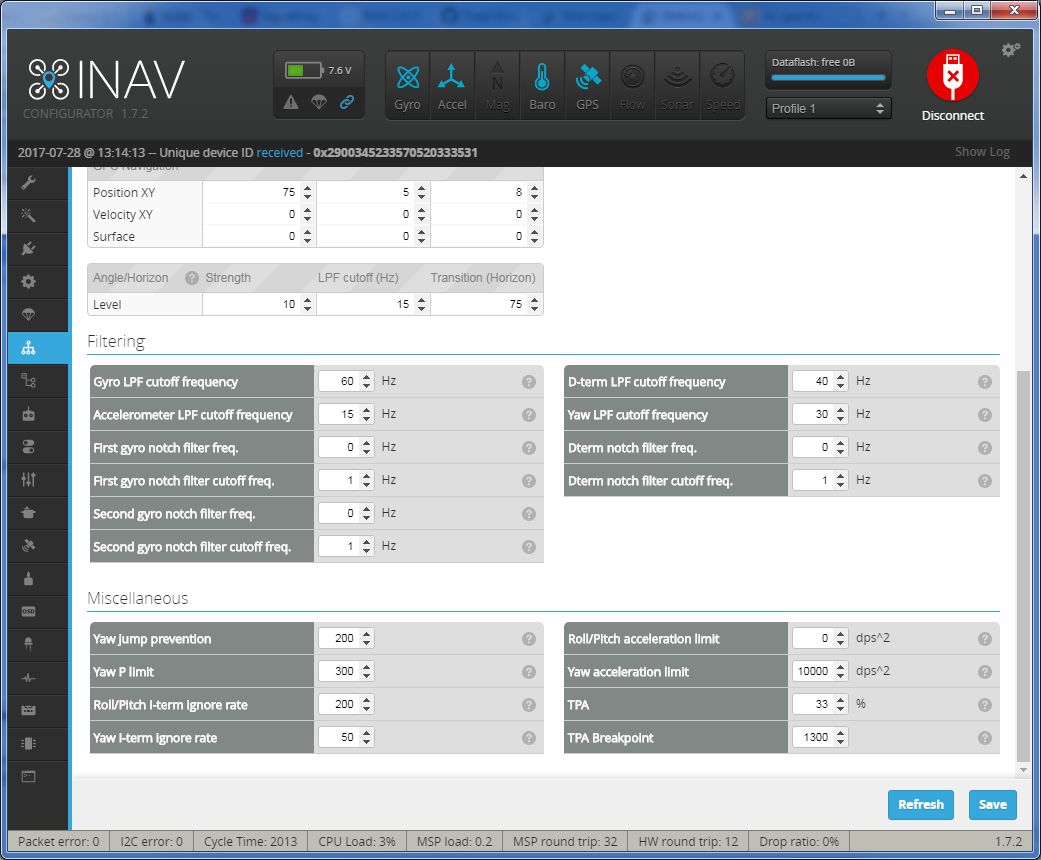
Tehát először a Preset fülön betöltöttem a Z-84 profilját, ami átállította a gép típusát csupaszárnyra, belőtte a filtereket és betöltötte a Z-84-hez optimális PID, akarom mondani PIFF értékeket.
Az 1.6-os verzió óta az iNAV nem PID, hanem PIFF vezérlőt használ a merevszárnyú gépekhez, aminek viselkedése a készítők szerint sokkal jobban utánozza egy emberi pilóta viselkedését, mint a hagyományos PID controller. A PID tuning lapon a Derivative oszlop jelképezi a Feed-Forward-ot. Az iNAV oldalán van egy jó írás angolul a PIFF controllerről.
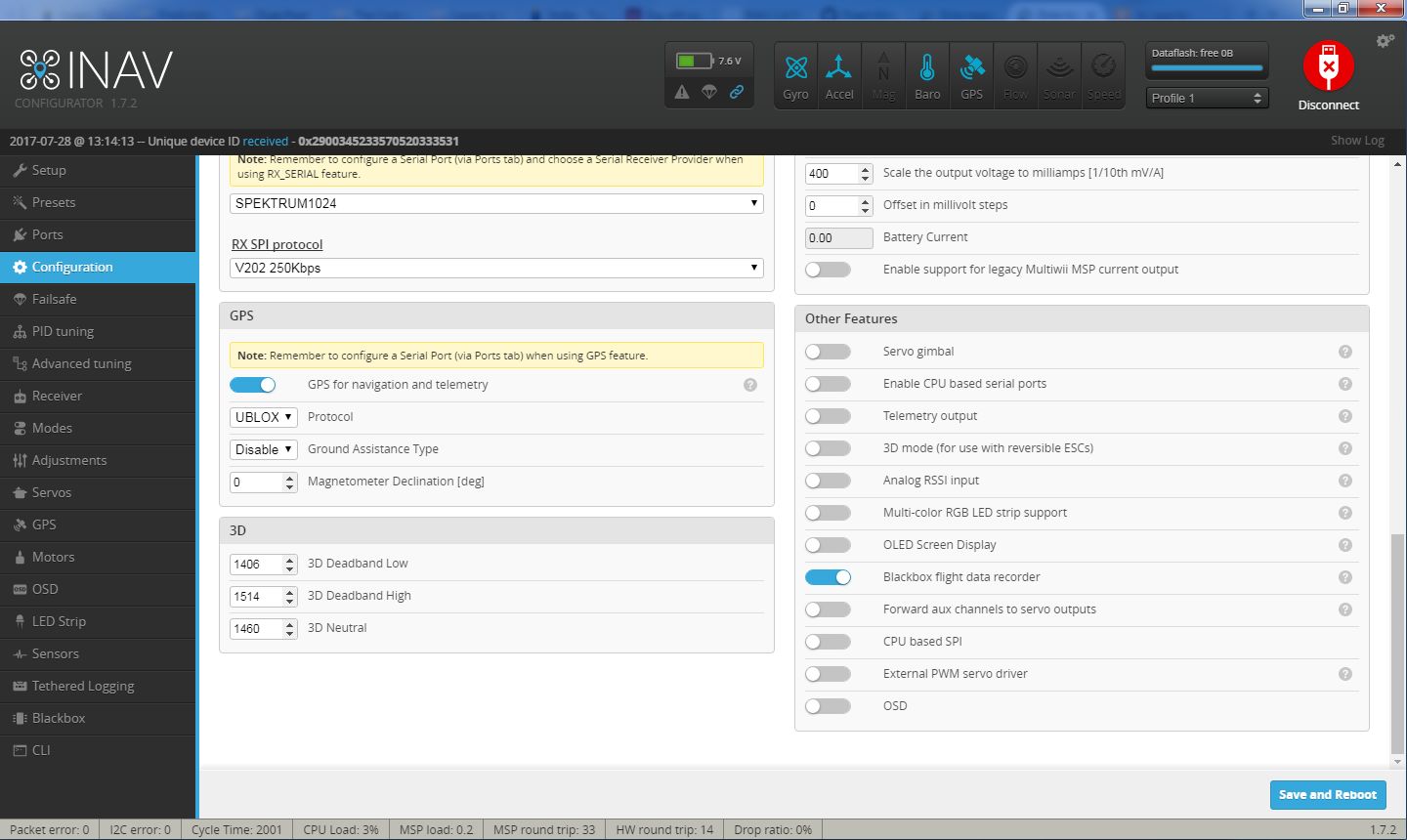
A Ports fülön az UART1-en meghagytam az MSP-t az USB-nek és az UART2-őn bekattintottam az MSP-t az OSD-nek. Az UART3-ra került az Ublox 7 GPS 57600 Baud Rate-el. Amint az előző részben említettem, Micro Minim OSD soha ne kerüljön az UART3-ra, mert az csak 3,3V-ot tolerál az RX/TX lábakon, ez az OSD meg pont 5V-on küldi az TX-et.

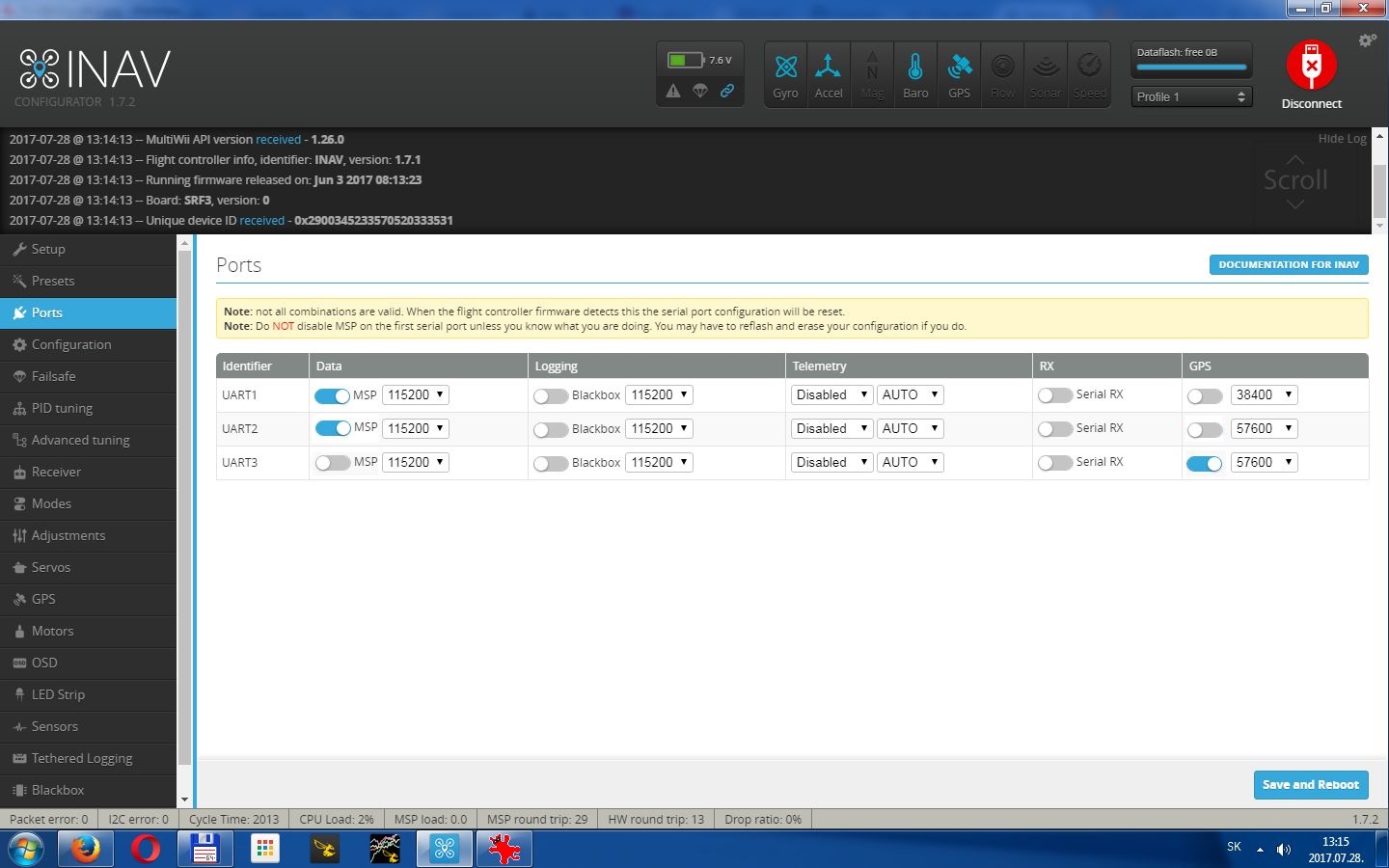
A configuration fülön a Mixer mezőben ellenőriztem, hogy a Flying Wing van-e beállítva. Figyeljük meg, hogy a repvezérlő első két kimenete a motorok szabályzóinak van fenntartva, a 3. tartozik a bal, a 4. a jobb szervóhoz. Amennyiben csak egy motorunk van, azt az 1. kimenetre kössük, a második kimarad.
A Sensor mezőben kikattintottam a magnetométert, mert az repülőgépnél nem kell, az Accelerometer-t bent hagytam, mert az nélkül nem elérhetőek a stabilizált módok. A barométert bekattintva hagytam, mert nem túl sok vizet zavar.
Hogy merevszárnyú gépnél a barométer szükséges-e, arról megoszlanak a vélemények. A barométerről tudni kell, hogy pontosabb a GPS-nél, ha magasságmérésről van szó. Digital Entity szerint jobb, ha be van kapcsolva, más fejlesztők szerint meg inkább hagyjuk kikattintva. Én eddig nem tapasztaltam eddig semmi gebaszt bekacsolt barométerrel. Persze ne felejtsük el letakarni a barométert szivaccsal, ügyelve arra, hogy ne ragasszuk le a lyukakat.
Az ESC/Motor mezőben bekattintottam a Don't spin the motors when armed-ot, mert földet éréskor nem akarom, hogy pörögjön a propeller, mert hülye azért nem vagyok. :D
A Receiver mode mezőben PPM-re állítottam a vevőt.
A Battery Voltage mezőben a cleanflightnál taglalt módon kalibráltam az akku feszültségét.
Bekattintottam a GPS-t a GPS mezőben (DUH!), protokollnak pedig az UBLOX-ot választottam.

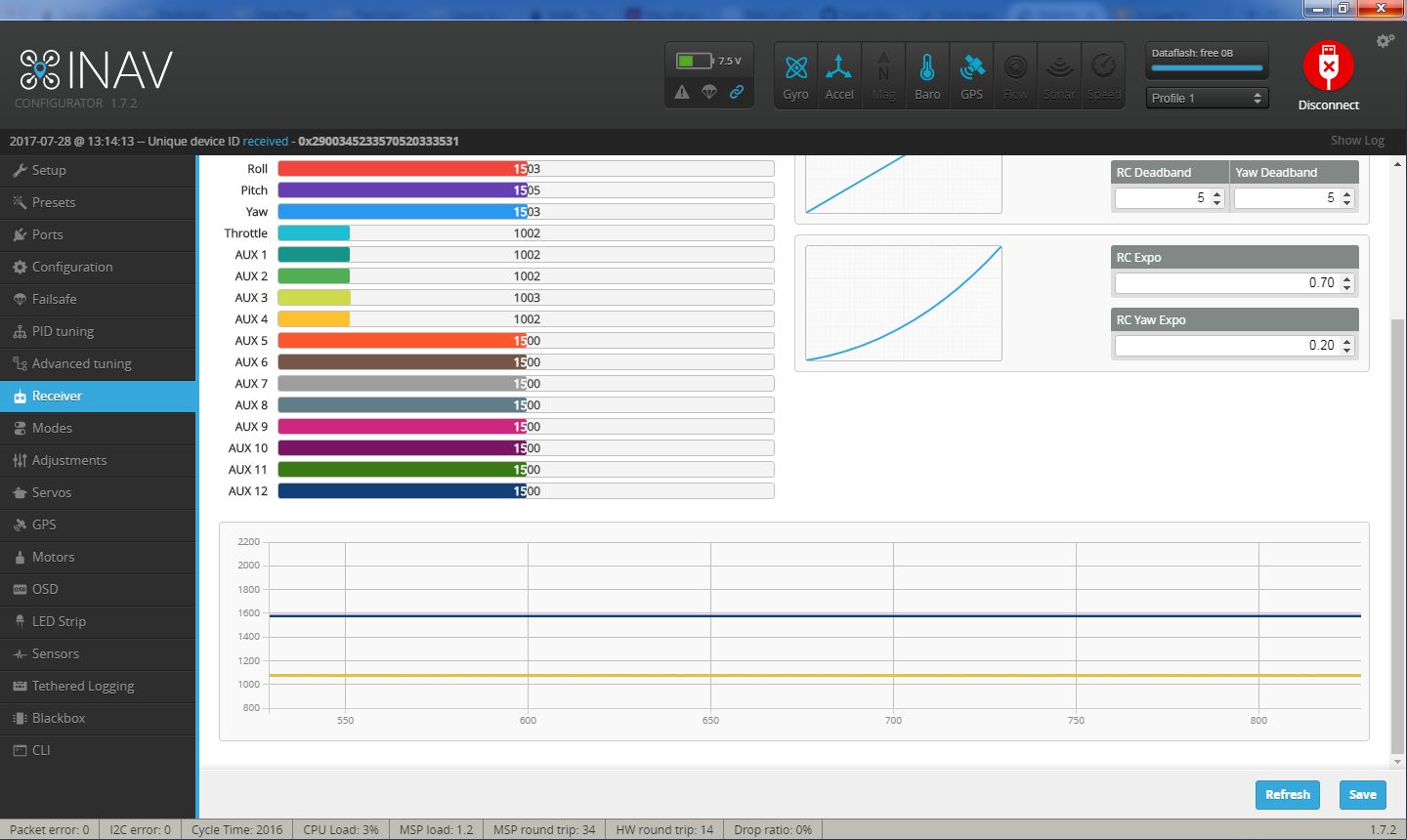
A szervókat egyelőre még nem aktiváltam, mivel még dolgom volt a távirányítóval és vevővel. Emlékeztek még, amikor a a 3. részben megmutattam a szervó mixet? Na, azt felejtsétek el! Az iNAV maga végzi a szervómixelést, így a távon reseteltem a Z-84 modellt. Ezek után megnéztem, hogy a PPM-en elérhető nyolc csatorna megfelelően mozog-e, nem maradt-e bent mix vagy nincs-e egy csatorna invertálva.
A szervók beállítása, kalibrálása
Miután mindent elmentettem és kétszer átellenőriztem, aktiváltam a motor ill. szervókimeneteket az ESC/Motor fülön. Ekkor ért az első meglepetés, ugyanis a repvezérlő elkezdett fagyni, a szervók pedig fel-le ugrálni. Az akku csatlakoztatásával ez elmúlt.
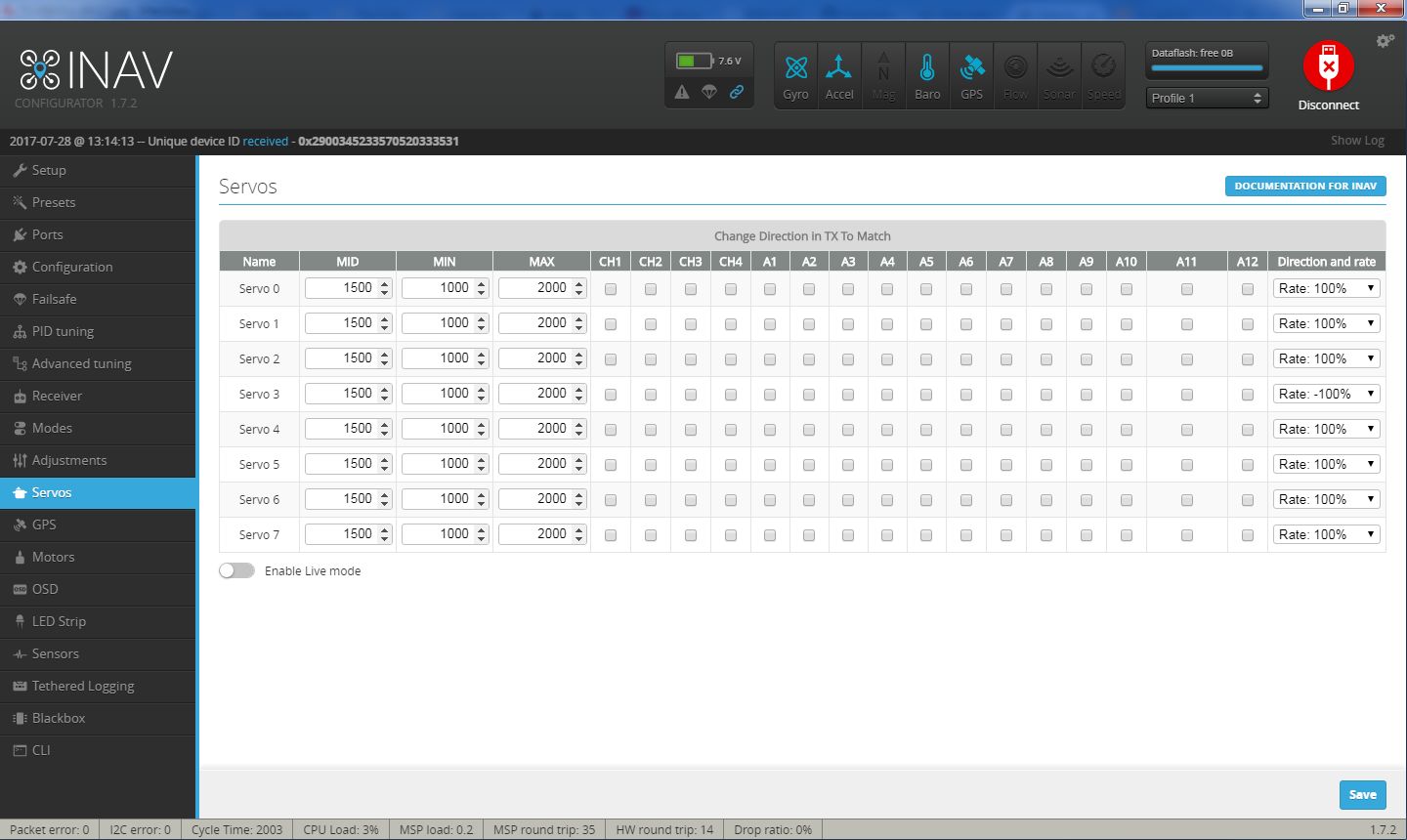
Most jöjjön az, ami kvadkoptereknél nem volt, a Servos lap. Ezen a lapon a bal, azaz 3-as szervót a Servo 3, a jobbot pedig a Servo 4 jelképezi. Jó lenne tudni, miért 0-tól kezdték a számozást, de ez most nem számít.
Ellenőriztem, hogy a szervók középállásában az elevonok szépen a szárny többi részéhez simulnak-e.
A Z-84 elevonjainak a többi repülő szárnnyal ellentétben nem kell felfelé állniuk 1-2 centit a szárny kilépő éléhez képest. Valószínűleg azért nem, mert a kilépő él is felfelé van csavarva egy picit.

Mivel az elektronika beszerelésekor a szervókat az egyik leégetése után már vigyázva, középállásban szereltem be és nem sumákoltam el az elevonok beállítását a karocskákkal, így a MID maradhatott 1500-on. A szervók végpontjain sem kellett állítanom, így maradhattak 1000 ill. 2000-en. Ha nem akartok gyors búcsút venni pár szervótól, beszereléskor tényleg figyeljetek oda a középállásra és hogy ne ütközzenek valamivel a szervó húzokarjai maximális kitérésnél.
Megmozgattam a táv jobb karocskáját és konstatáltam, hogy az elevonok össze-vissza járnak. Átállítottam a Servo 3 Rate-jét -100%-ra és bingo, az elevonok úgy vislekedtek, ahogyan az első Z-84 videóban mutattam. A szervók tesztelése 4:50-nél kezdődik.
Magamat idézve a 3. cikkemből:
- ha előre nyomom a jobb pöcköt az elevonok lefelé buknak
- ha magam felé húzom, felfelé fordulnak
- ha balra húzom a bal felmegy a jobb pedig le
- ha jobbra húzom a jobb megy fel, a bal pedig le
Mivel az elevonok maximális kitérésére is vigyáztam a gép összerakásakor, így a szervókon nem kellett állítanom. Az emíltett kitérés cca 1,5 centi felfelé, illetve lefelé. Amennyiben túl nagy lenne az elevonok kitérése, azt a Rate százalékának csökkentésével lehetne elérni.
Jöhetett a gyorsulásmérő kalibrációja és a vele járó esőtánc. Aki nem tudná miről beszélek, vigyázó szemeit a KGB project iNAV-os cikkére vesse.
A repmódokat most még nem állítottam be, mivel az iNAV nem hajlandó ARM-olni a fő motort, ha bármilyen GPS asszisztált repülésmódot választunk és nem talál elég szatelitot, ami alapértelmezés szerint hat darab.
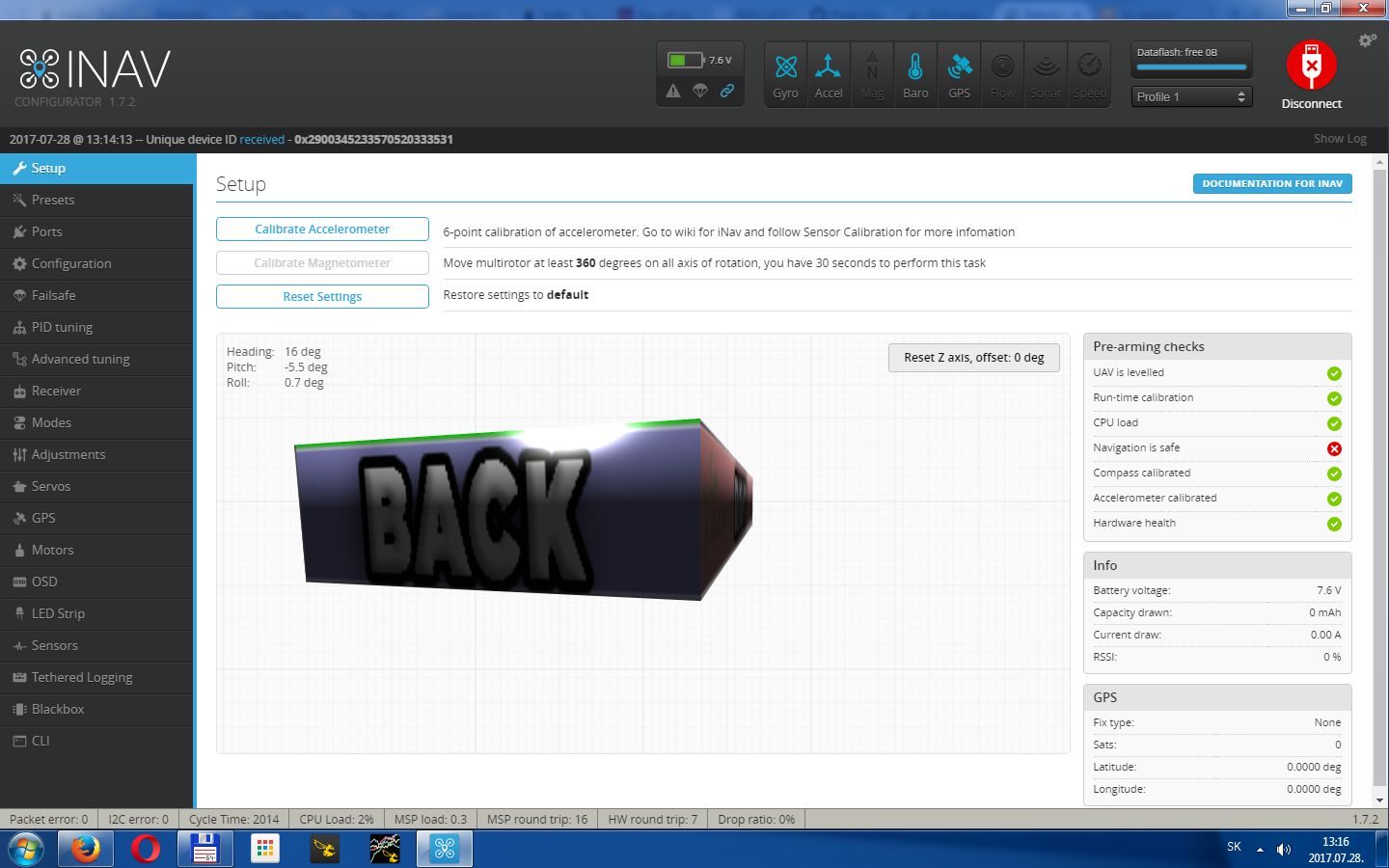
Ellenőriztem, hogy a Setup fülön minden szükséges zöldre váltott-e, majd beröffentettem a motort a távról és csekkoltam, hogy tényleg állva marad alapjáraton, jó irányba indul-e el indításkor. Felraktam a propellert, ellenőriztem, hogy tényleg előre akar-e haladni a gép, nem hátra mint egy rák. A motors fülön kalibráltam a motor szabályzóját. Miután minden rendben volt jöhettek a repülésmódok.
Repülésmódok beállítása
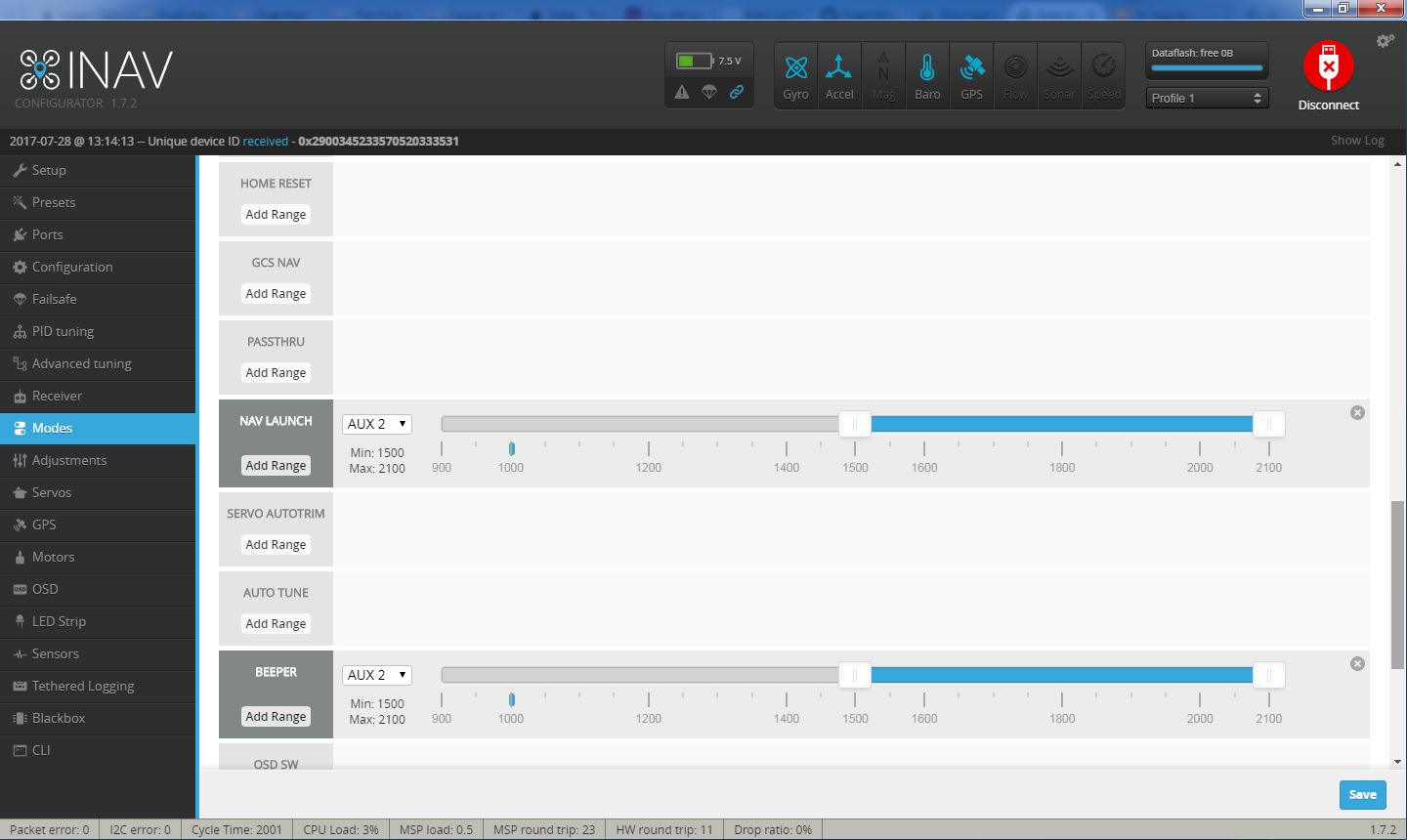
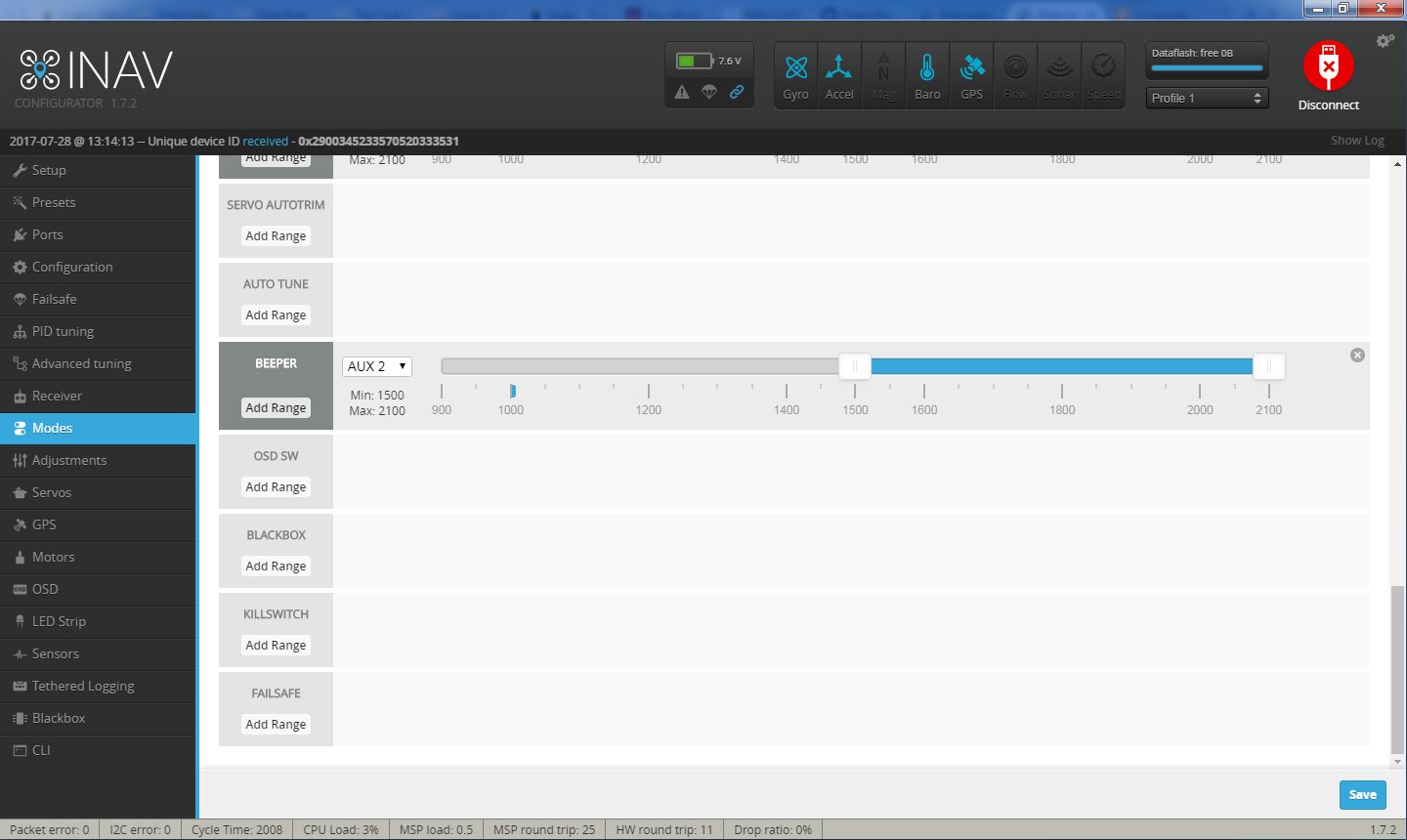
A gép élesítését, azaz az ARM-ot kitettem az AUX1-re, mert csak dedósok armolnak stick commanddal! A BEEPER és NAV LAUNCH ment az AUX 2-re. Az AUX 3-ra raktam a POSHOLD+ALTHOLD és RTH módokat. A negyedik kapcsoló vált az ANGLE és ACRO módok közt.

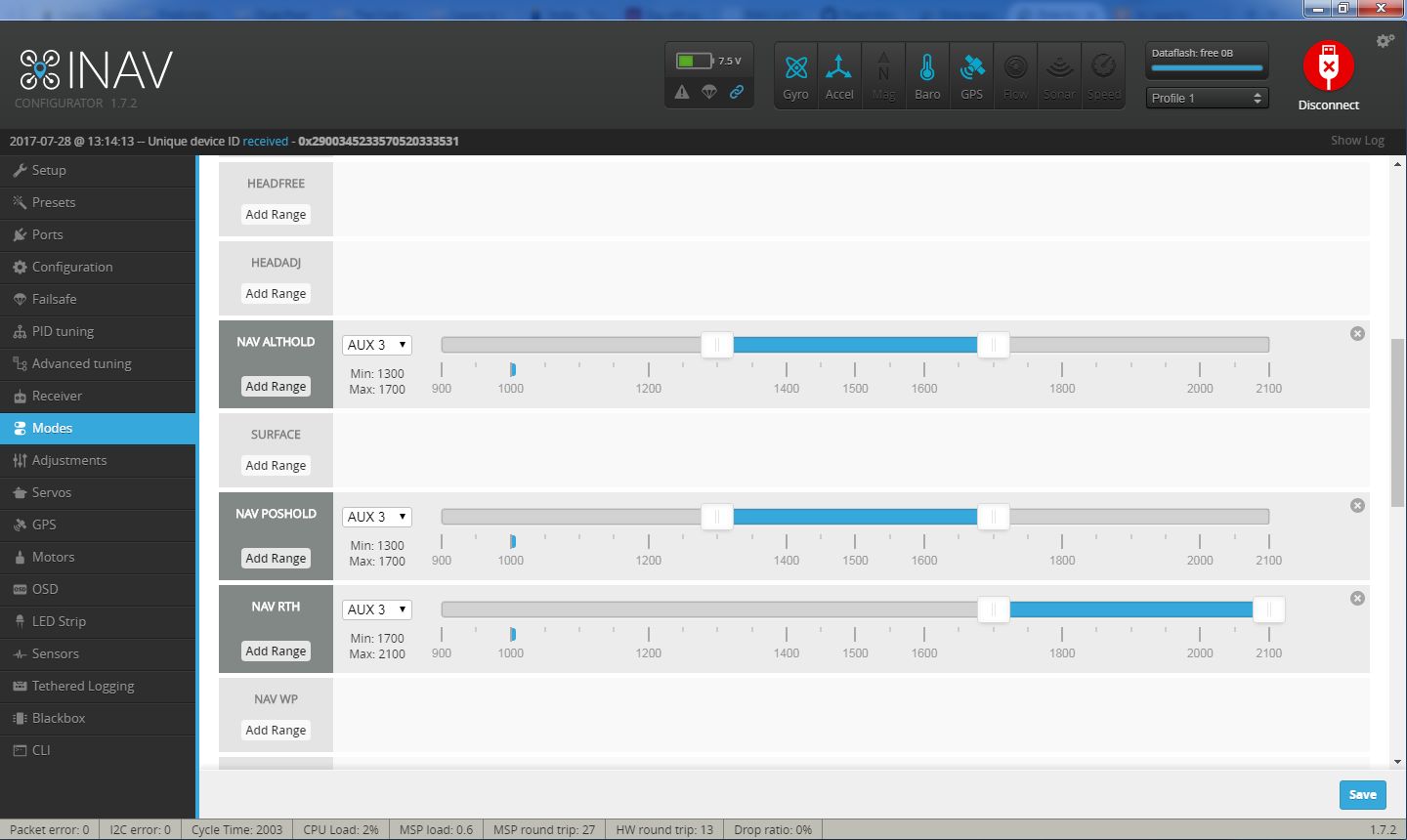
Mivel a repülőgép nem képes egyhelyben lebegni a levegőben, ezért a POSHOLD a valóságban az ú.n. LOITER MODE-ot aktiválja. A röpcsi ebben a módban körözésbe kezd azon pont körül, ahol aktiváláskor éppen volt.
Nyugi, már majdnem vége, már csak pár simítás van hátra!
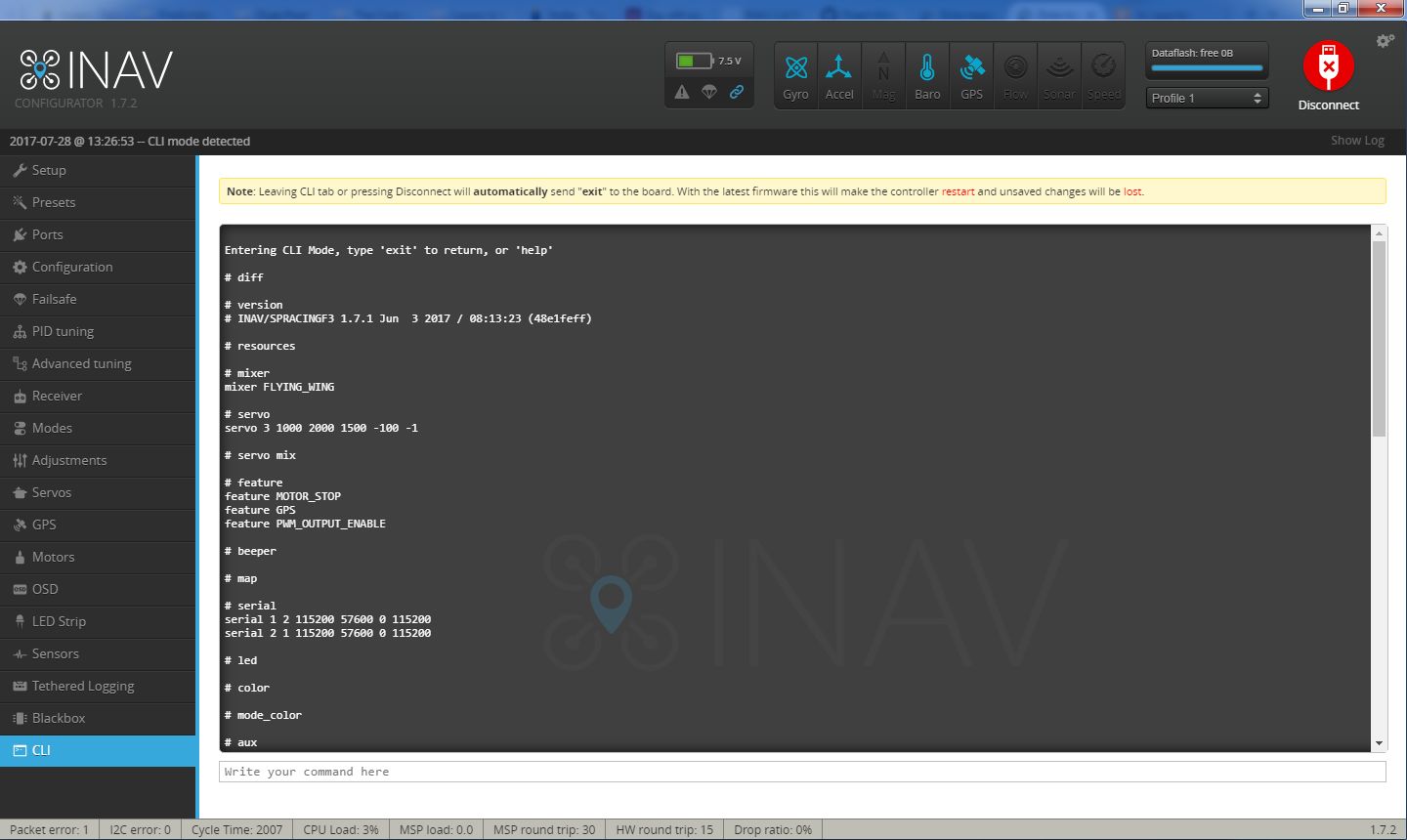
A fene tudja miért, de az iNAV fejlesztői nem tartották fontosnak, hogy pár értéket alapértelmezetté tegyenek, így ehhez a CLI-ben be kell írnunk pár parancsot.
A CLI a parancssor. Tudod, fekete háttéren fehér betűk. Nincs meg? Nem baj, a csattogós lepke is egy szép játék.
Na jó csak vicceltem, nem kell betojni, tervezek egy Command Line Interface videót, amint megtalálom a megfelelő desktop rögzítő progit, mert elég sok hasznos funkciót tud, nem csak a "dump"-ot.
1. Megadjuk, hogy stabilizált módban a röpcsi 60 fokban térhessen ki fel-le ill. oldalra. Az alapértelmezés 30 fok, ami egy vicc.
set max_angle_inclination_rll = 600
set max_angle_inclination_pit = 600
2. engedélyezzük a gépnek, hogy bármilyen szögben élesíthessük a fő motort. Az alapértelmezés valami 25 fok, ami asszisztált indításnál (NAV LAUNCH) tud kellemetlenül megtréfálni.
set small_angle = 180
A röpcsink mostmár kézi vezérlésnél is tűrhetően fog repülni, de ahhoz, hogy a LOITER és RTH módok is értékelhetően működjenek még kell egy kicsit molyolni az Advanced tuning fülön. Ha hagyunk mindent alapértelmezésen, az RTH Return To Hongkong-ot fog jelenteni.
Fontos! A GPS asszisztált módokhoz a beállításaim még nem véglegesek, bizony még faragnom kell rajtuk a megbizható műkdésért.
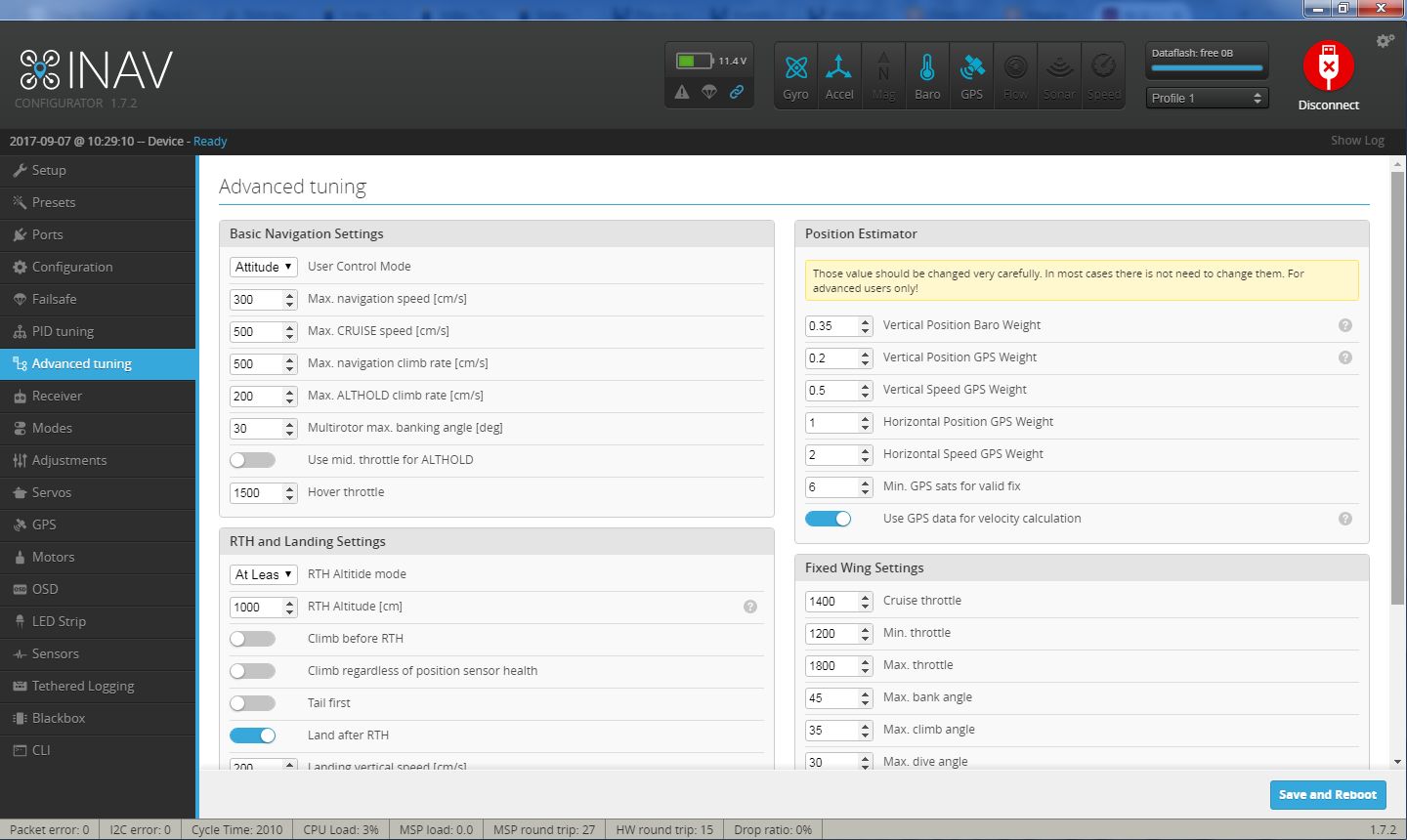
Az Advanced tuning fülre lépve ne ijedjünk meg, hogy a Basic Navigation Settings mezőben a Max. navigation speed 3m/s - helyből ignorálhatjuk, mivel csak multikopterre vonatkozik. Az egész mezőt ignorálhatjuk röpcsinél.
Az RTH and Landing Settings-nél az RTH altitude 1000cm, azaz 10m. Teszteléshez OK, de ha már minden működik, akkor állítsuk legalább 20m-re, ha nem akarjuk a gépet egy fáról vagy villanyoszlopról lehalászni LOITER / RTH közben.
Climb before RTH - emelkedjen hazatérés előtt. Akkor jöttem rá, hogy jó ötlet, amikor 2m-re a földtől nyomtam egy RTH-t, a röpcsi meg beleállt a földbe. :D
Land after RTH - ha nincs bekattintva a hazatérést követően nem száll le, hanem köröz a kiindulópont körül, míg ki nem fogy az akku vagy le nem szállunk vele kézi vezérlésben.
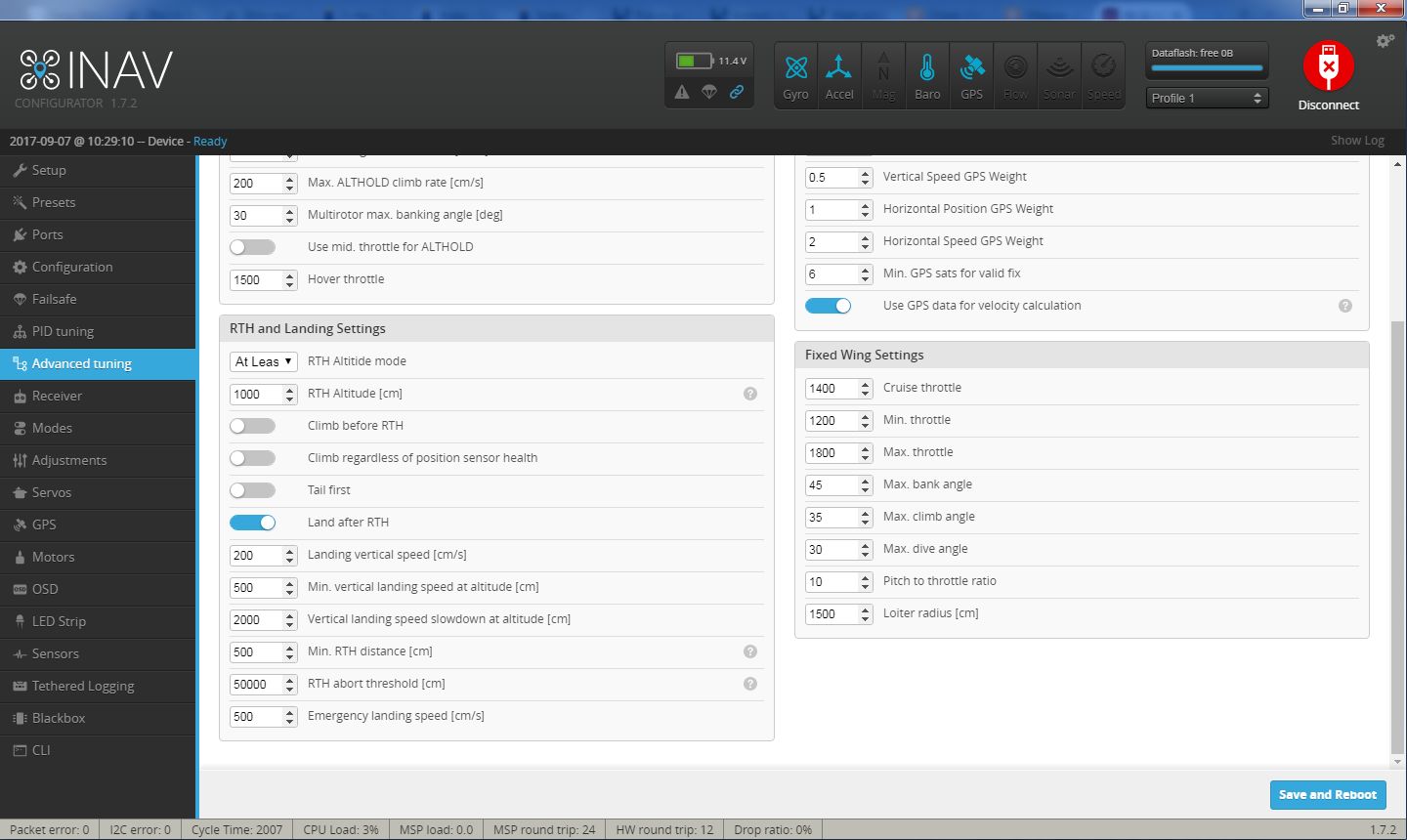
És most a fontos dolgok:
Fixed Wing settings mező
Loiter radius - alapértelmezés szerint 5000cm, azaz 50m-es sugarú, tehát 100m-es átmérőjű körben fog körözni. Akinek nincs focipályája veheti lejjebb. 20m sacc/kb. még OK a gépnek, és 15m is tűrhetőnek tűnik nekem, de RCG-n már nem ajánlják.
Max. bank / climb / dive angle (oldalra dőlés, emelkedés, süllyedés - alapértékek 20/20/15 fok) - nnna, ezekért akart a röpcsi elrepülni a csába LOITER módban a videóimban. Egyszerűen ezek a szögek túl kicsik egy 84 centis fürge röpcsinek, hogy 30-40m-átmérőjű körben tudjon körözni. Először minden értéket megemeltem 15-el, azaz 35/35/30-re állítottam őket, de a 15m-es rádiuszú körben repülést csak nagy nehezen tudta tartani. A bank angle-t felraktam 45 fora, és nagyon úgy tűnik, hogy képes végre 15m sugarú körben körözni, kb. 4-5m-es drifteléssel. Mivel a gépnek egyelőre fingja sincs az aktuális szélsebességről, ezért a driftelés jobb nem nagyon lesz, míg be nem vezetik a Pitot cső támogatását valamikor az iNAV 1.8-ban.
Amit eddig nem állítgattam
Cruise / min/ max throttle - a gép autonóm módban szerintem jól kezeli a gázkart, de más akkuval, propival és motorral ezt lehet, hogy állítgatni kéne
Pitch to throttle ratio - no, ez egy érdekes állat. Ha a gép emelkedik, akkor fel kell pörgetni a motort, ha süllyed, lejjebb kell venni a fordulatot. Ez egy egyszerű arányszám, és vagy működik vagy nem. Digital Entity, az iNAV vezető fejlesztője, is azon filózik, hogy ezt kidobja és valami értelmesebbel cseréli le:
"Unfortunately nav_fw_pitch2thr is a dumb multiplier for pitch angle which is totally incorrect. We need some math that will be more connected to real world."
Mellesleg ezen is sokat javíthat a feljebb említett Pitot cső támogatás valamikor a közeljövőben.
Már majdnem vége, csak a Failsafe maradt
Amennyiben iNAV 1.6 vagy későbbi kiadás fut a masinánkon az RTH kileteszteléséig nyugodtan tehetjük Land módba, mert jelvesztés esetén a röpcsi leszáll. Az 1.5-ös és régebbi iNAV kiadások a Cleanflight / Betaflighttól örökölt ökörségben szenved, így ebben a módban a röpcsi jelvesztésnél kis gázzal egyenesen elrepül a csába!!!
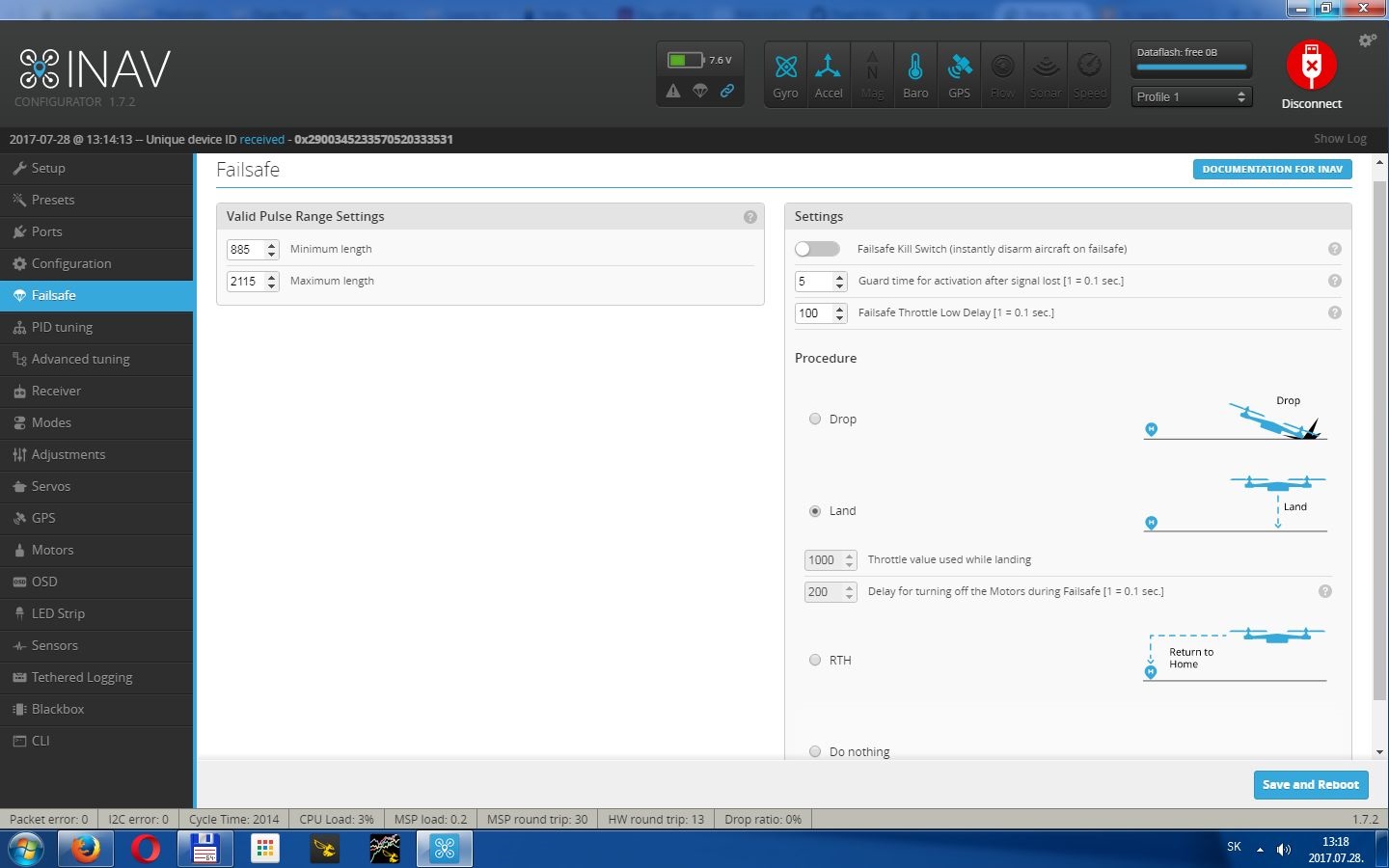
Amennyiben a hazatérés többször rendben le volt tesztelve és megbízhatóan működik, akkor állíthatjuk RTH módba a Failsafe-et, ha azt szeretnénk, hogy jelvesztéskor röpcsink haza térjen és landoljon. Persze csak akkor fog landolni, ha a Land after RTH-t engedélyeztük az Advanced tuning fülön.
Ééééés egyelőre ennyi volt, a csupaszárny röpcsink repülésre kész!
Tudom, ez még messziről nem teljes leírás, pl. hiányoznak a servo mixek , a PIFF tuning és a NAV launch, a repülés közbeni szervóállításról (autotrim) nem is szólva. A szervók mixelésébe nem akarok beleokoskodni, mivel csak csupaszárny gépeim vannak. Angol leírás a szervómixről itt, előre definált mixek exotikusabb gépekhez (V-szárnyú, Skyhunter Nano) itt érhetőek el.
A Z-84 szerény véleményem szerint szerint elég jól repül a profilja által beállított PIFF értékekkel. Ha más géped van vagy szeretnél reszelni az alapértelmezett PIFF-en, akkor a PIFF tuningról itt találsz egy jó leírást és Painless 360 videója is elég jó alapot ad. Mindenesetre beraktam a Z-84-hez alapértelmezett PIFF értékeket, ha valamit sikerülne elállítgatnod.

Az iNAV-ban járatosaknak linkeltem a LopakoDrón teljes configját (dump), illetve csak az eltéréseket (diff) az alapértelmezettől.
A NAV launch assist pedig egy nagy kupac lótúró, hagyományos indással még egy olyan röpcsiszűz is elboldogul mint én.
A következő röpcsim szintén csupaszárny, egy S800 Sky Shadow lesz, ami a tartósabb EPP habból készül a Z-84 EPO-ja helyett és aminek a központi egysége egy minden földi jóval ellátott Omnibus F4 V2 pro lesz, hogy ne legyen olyan patkányfészek a gépben.
Na, most már tényleg itt a vége, fuss el véle!
Ha tetszett a bejegyzés dobj egy lájkot YouTubeon vagy Facebookon! Köszi!