
Emax Babyhawk - a sólyomfióka
Hawk és Mihók fia vagyok én
Az idei tél egyértelmű slágerei a kefés motoros mikro-versenygépek, más néven "Tiny Whoop"-ok, avagy zsebrészerek voltak. Az ok egyszerű: kint hideg van és hó vagy köd és latyak. A meleg szobában viszont elég problémás lehet egy 250-es versenygéppel csapatni, így aki télen is belső nézetben akart röptetn,i és nem egy tornateremben lakik, az beújított egy ilyen minit. A legjobb viszont az, hogy ezeket a picurokat a tavasz beköszöntével ki lehet vinni a kertbe vagy a parkba, mivel nem kell attól tartanunk, hogy valakit agyoncsapnak. Én is elég jól elszórakoztam a Tiny QX80-al, és mikor az ereje már nem volt elég, megépítetten a kétcellás Ólomverebet.
 A sólyomfióka a fészkét elhagyva a fenyőn pihen
A sólyomfióka a fészkét elhagyva a fenyőn pihen
Időközben elkezdtek zsugorodni a brushless, azaz kefementes gépek, és azt vettük észre, hogy az Emax piacra dobta a 85mm-es Babyhawkot. Bizony, a két átellenes motorja közti távolság csak 5mm-el nagyobb, mint a QX80-nak. A sajtóanyagok szerint a tömege picit több (44g vs 60g) viszont a brushless motorjainak köszönhetően sokkal gyorsabb, erősebb, agilisebb és remélhetőleg nem kell majd motort cserélni 30-40 felszállásonként. Bizony-bizony, a kefés motorok, mint a mosónők, korán halnak, pláne, ha kétcellás akkuval hajtjuk őket. Az is kiderült, hogy a repvezérlő az Emax F3 Femto lapkája, ami annak ellenére, hogy kisebb mint a legtöbb kefés gép vezérlőegysége, teljes értékű F3 EVO repvezérlőnek ígérkezik. A gépet még idén januárban jelentették be, és mindjárt akkora hype alakult ki körülötte, hogy csak pislogtam. Érdekes módon a folyamatos csúszások a megjelenési dátumban és a bloggereknek küldött tesztpéldányok állandó alakítgatása sem szegte kedvét a felajzott tömegnek. Mit mondjak, kicsit engem is elkapott a gépszíj. Kicsit nagyon. :)
A doboz és ami benne van
Amikor lekaptam a tipikus szemeteszsák külső borítást, az alábbi pofás kis doboz fogadott.


Kimondottan minőségi érzetet kelt, akár egy felsőbb kategóriás mobil vagy tablet doboza is lehetne. A dobozt kinyitva három réteg habszivacs fogad, amelyek közül az első eltávolításával feltárul a minikopter kamerája és hozzáférhetünk a négy cserepropellerhez és pótcsavarokhoz. Aminkor eltávolítjuk a középső szivacsot, tudjuk kiemelni magát a drónt. A szivacs elég vastag és jól tarja a gépet, feltehetően jó védelmet nyújt. Ezen kívül még kapunk egy nagyon szűkszavú használati utasítást, és ennyi. Se egy imbuszkulcs, se egy szerelmeslevél. Mondjukrá az utóbbi nem is hiányzik, de az előbbi miatt anyáztam egy sort, amikor a propellervédőt akartam leszerelni, de erről majd később

Aki szemfüles, az észreveheti, hogy a kopteron két antenna van. A rádióvevő antennája nem a csomag része, csak a kép miatt már nem akartam leszerelni. Ugyanúgy a propellerek és géptörzs fűszínűre festését szintén magam oldottam meg. :)
Milyen komponensekből áll a Babyhawk?
Kamera és videóadó - a kopterünk tetején találhatjuk a kamerát és videóadót magába foglaló kombót. A kamera felbontása 520TVL és a technológiája is CMOS, nem CCD ami nem tűnik túlságosan jónak a mostani 1000TVL-es CCD kamrák mellett, de mint később látni fogjátok, kimondottan jó képminősége van a Babyhawknak. A kamera fókuszát nem egyszerű állítani, mert be van ragasztva.

A videóadó eredetileg 200mW és 25mW közti állátásra adott lehetőséget, az én verziómban ez már fix 25mW. A szintén 25mW-os KingKong Q25 kamera + adó kombóból kiindulva ez bőven elégnek ígérkezik 100m-ig, legalábbis az Ólomveréb és a Tiny QX80 nem panaszkodott. :)
A tesztpéldányom antennája dipól, az első gépek még lóhere antennát használtak. Ez nagyon jó dolog, ugyanis sokkal tartósabb. Állítólag a kamera megbontásával elérhetővé válik egy PAL/NTSC kapcsoló, de én ezzel nem foglalkoztam, mivel minden vevőm támogatja mindkét szabványt. Ha nagyon akarjátok, kinyithatom a burkolatot, mi a helyzet a kapcsoló terén.

A videóadó hátulján egy hétszegmenses kijelző található meg egy gomb. A kijelző betűvel jelzi a kiválasztott frekisávot, a szám pedig az aktuális csatornát, amelyiken ad, a gombbal, meg ki gondolná, ezek között válthatunk. Amennyiben lezúznátok a kamerát,cserét itt találhattok.
Motorok - négy Emax RS1104 motorunk van, melyek paraméterei 1104 és 5250KV 2S, azaz a sztator átmérője 11mm, magassága pedig 4mm, voltonként 5200-al növekszik a motor fordulata percenként és hivatalaosan maximum kétcellás akkuval ajánlja a gyártó hajtani. Persze nem hivatalosan lehet háromcelllás akkuval is.

Ez eddig teljesen szokványos, az érdekesség a propeller felfogatásánál jön. A propeller rögzítésére szolgáló csavarmenetek a szokványostól távolabb, 8,5mm-re helyezkednek el egymástól, a propeller tengelyének átmérője szerencsére a szokványos 1,5mm. Mivel kis csavarokkal rögzülnek a propellerek, mind a négy motor egyforma, nincs balos vagy jobbos. Ami furcsa, hogy felül és oldalt semmi szellőzőnyílás nem található a rotoron. A motor versenygépektől szokatlanul egy távtartón ül, ilyet általában röpcsiknél látunk. Vigyázat! A motor alsó tengelye kilóg a motortartó alá, valamint a motor rögzítésére egy teljesen szokatlan 1,3mm-es imbuszkulcsra lesz szükségünk. Pótmotort itt, imbuszkulcs fejeket itt lehet szerezni, vagy a helyi szerszámboltban kérjünk H1.3-as imbuszt. Óvakodjunk a szénacél szettektől, válasszunk inkább króm-vanádium acélt (CroVa).
Propeller
Kopterünket Emax T2345 propival szállítják. A csavarok, ahogy a motorknál említettem 8,5mm-re állnak egymástól, melyeket 1,5mm-es imbusszal lehet rögzíteni. Szerencsére ez az imbusz már gyakoribb, a legtöbb kulcsszettben benne van. Nem tudom miért, de a propellerek kegyetlenül szorulnak a motor tengelyére. Propi cserekor abban a hiszemben voltam, hogy tönkre teszem a motort.
ESC - a motor szabályzója
A kopterünk négy darab 6A Bullet BLHeli_S szabival érkezik, melyek egy és kétcellás akkukra vannak hitelesítve, persze nem hivatalosan ezt is megküldhetjük háromcellás akkuval.
Az ESC protokollok közül a Oneshot125, 42 és Multishot mellett támogatja a DSHOT150,300 és 600-at is. Sajnos DSHOT-nál a negyedik ESC jelvezetékét át kéne rakni az eredeti helyéről. Hogy miért? Gőzöm sincs. Köszönöm Plasticbombnak a PH fórumról az RCGroupsos találatot.
Az Emax F3 Femto repvezérlő valamint a radióvevő és a csipogó csatlakoztatása
A kopter repvezérlője az Emax büszkesége, a picur F3 Femto minden egyben lap, ami F3 EVO alapokra épül, azaz külön van kezelve az USB port az első soros, azaz UART porttól. Az F3 három UART portjából az utolsó kettőnek vannak lyukak az alaplapon, az első talán az USB port alatti kivezetésen érhető el, de ennek még utána kell néznem. A repvezérlő tartalmazz a PDB-t, így a motorok szabályzóit közvetlenül forraszthatjuk, és tartalmaz 5V-os regulátort, így erről sem kell gondoskodnunk. Egyedül az OSD hiányzik, így ezt külön kell beépítenünk, ha TOP GUN pilótának akarjuk magunkat érezni. Az Emax F3 Femto dokumentációja innen tölthető le.
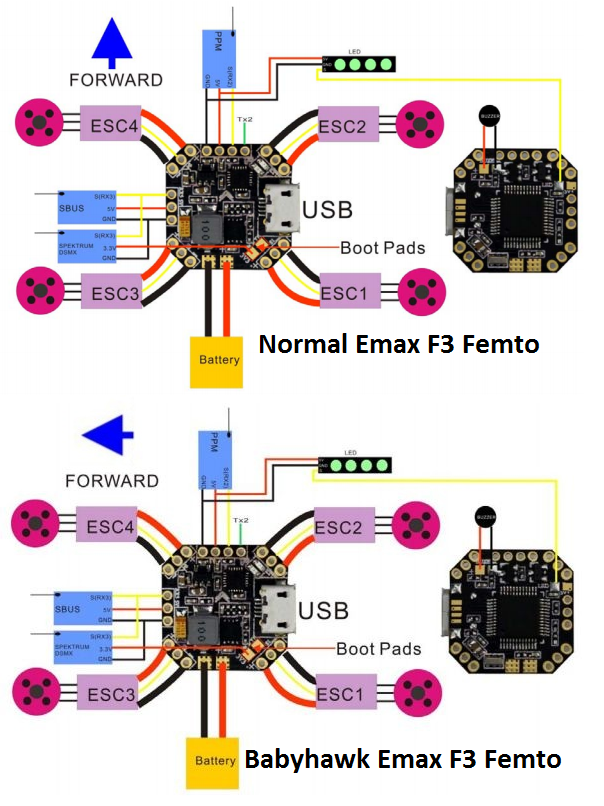 Arra vigyázzunk, hogy a Babyhawk F3 Femto lapkájának az USB-vel szemben van az eleje!
Arra vigyázzunk, hogy a Babyhawk F3 Femto lapkájának az USB-vel szemben van az eleje!
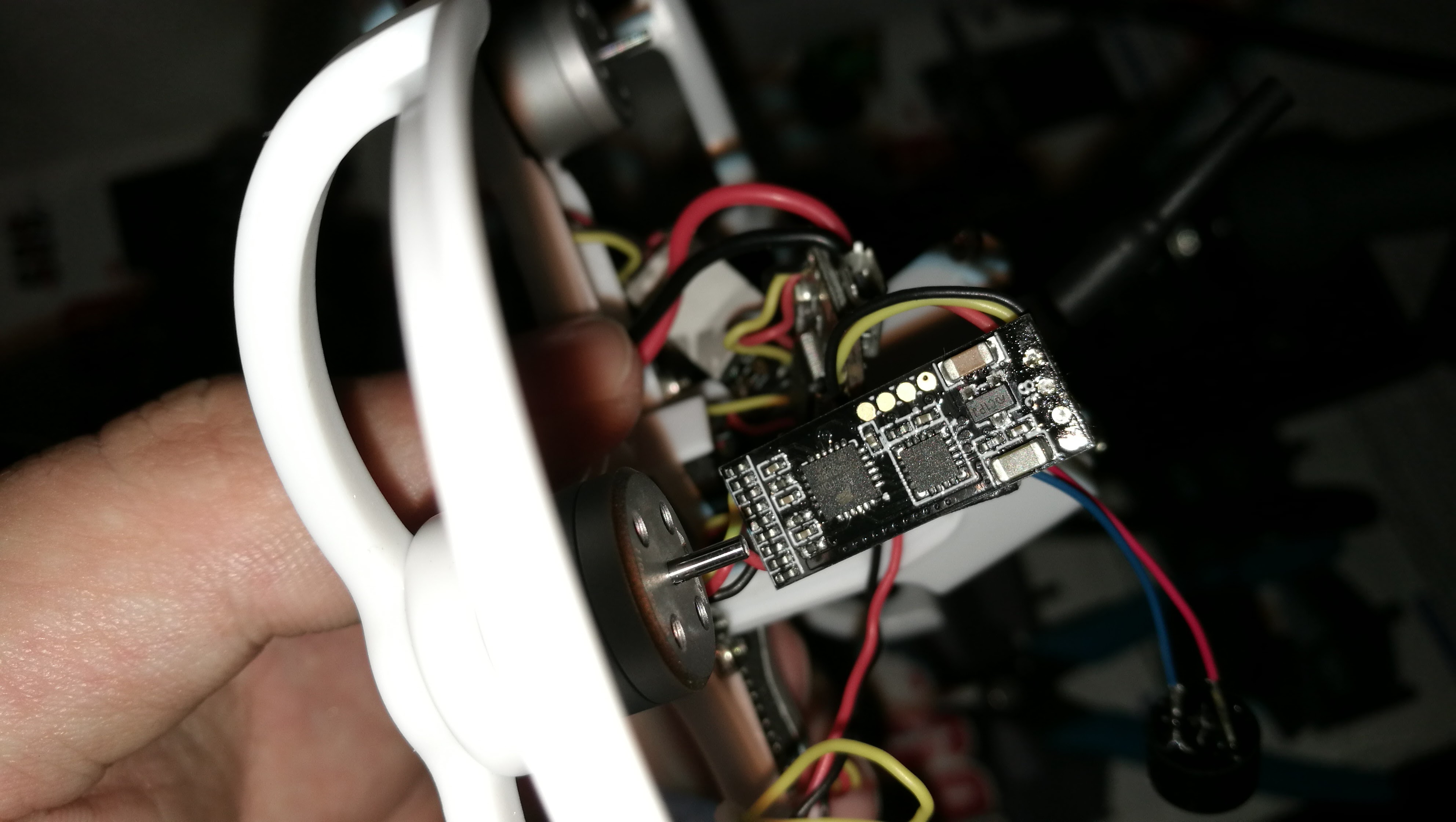
A gép elején található három tüskére a serial vevőnket csatlakoztathatjuk vagy forraszthatjuk. Sajnos a tüskék távolsága kisebb, mint a normál servo csatlakozóké, és az FS-RX2A vevőmnek eggyel odébb is van a serial kimenete, így inkább kiforrasztottam a tüskesort, és vezetéken keresztül kötöttem össze a vevőmmel. Meg szerintem amúgy sem jó ötlet a tüskesorra forrasztani a vevőt, mivel a súlyával terheli a repvezérlőt, ami bármilyen rögzítőlyuk híján csak egy szerencsétlen kétoldalú ragasztóval van rögzítve. Mellesleg ez a 3. UART port, de a TX pint elvitte a cica, így ez OSD-re nem lesz jó. Visszagondolva, most már inkább a tüskesorra forrasztanék, mivel kínszenvedés volt a tüskesort kiforrasztani, mert nagyon szorult.
A repvezérlő jobb oldalán találjuk a második UART portot, ami a kamera + videóadó kombót is táplálja. Ha PPM vevőnk van, akkor ezt ide köthetjük. Ez az UART port teljes értékű, így már ide jöhet az OSD.
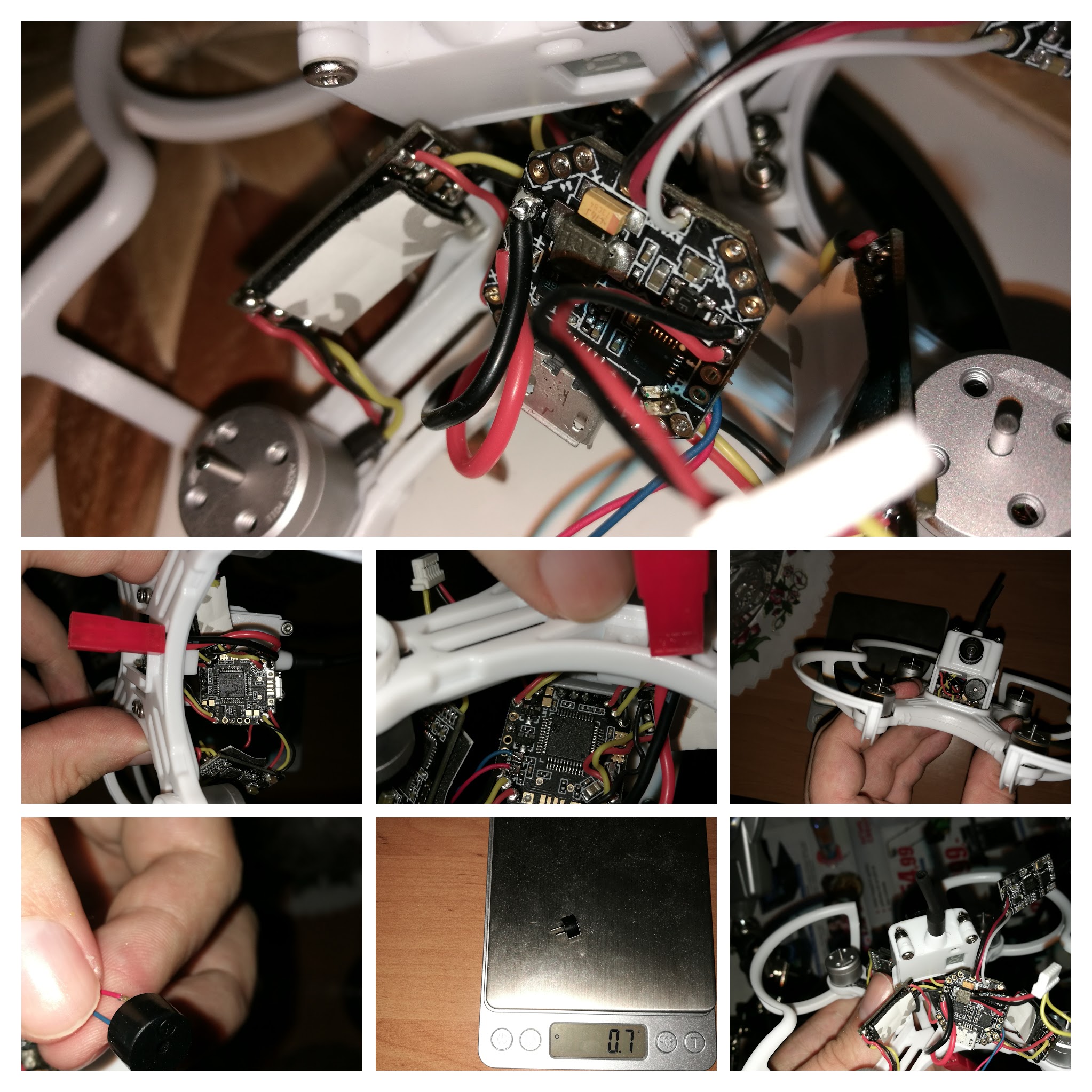
Mivel ilyen pici gép még az alacsony gyepben is képes elbújni, így mindenképpen szükségesnek éreztem a csipogó bekötését. Ilyen kis gépekbe a hagyományos csipogó hatalmasnak számít, így ezt a 0,7g-os picurt használtam. A csipogó forrasztási pontjai a repvezérlő alfelén hátul kaptak helyet, kellemetlenül közel három bolhafingnyi SMD alkatrészhez. Én ehhez már forrasztópasztát használtam, ugyanis zavart, hogy a legvékonyabb pákahegyem vastagabb, mint azok forraszpont közelében tobzódó szerencsétlen alkarészek.
A repvezérlőhöz a szabik a négy lecsapott sarkán csatlakoznak. Az első verzióban ezt még tüskesorral oldották meg, az enyémben már forrasztással.
Előkészületek a levegőbe emeléshez
A kopterem ARF (Almost Ready to Fly), azaz majdnem röpképes kiszerelésben érkezett. Ez azt jelenti, hogyha nem akarjuk túlcsicsázni a gépet, akkor csak akkut és egy mikrovevőt kell rárakni és indulhat a csapatás. A kopter a dobozból kivéve 69,6g-ot nyom a mérlegem szerint, aminek +/-0,02g a pontossága, tehát propvédőkkel 70g alatt kéne lennie. A csipogó és a vevő beforrasztásához le kellett kapnom a kopter felső borítását. Ezt a kopter hasán két 1,5mm-es imbusz csavar tartja, valamint karonként két-két műanyag pöcök. 
A csipogónak a kamera alatt találtam helyet, azonban a vevőt csak kamera hátára tudtam rögzíteni. A féloldalas rögzítés elméletileg arra szolgált volna, hogy a videóadó ne zavrja a távirányító vételét, de erről majd később. A gép mindent beszerelve, 18g-os akkuval együtt 90,7g-ot nyomott, de propellerenként csak két rögzítőcsavarral ez lefaragható 89,2g-ra.
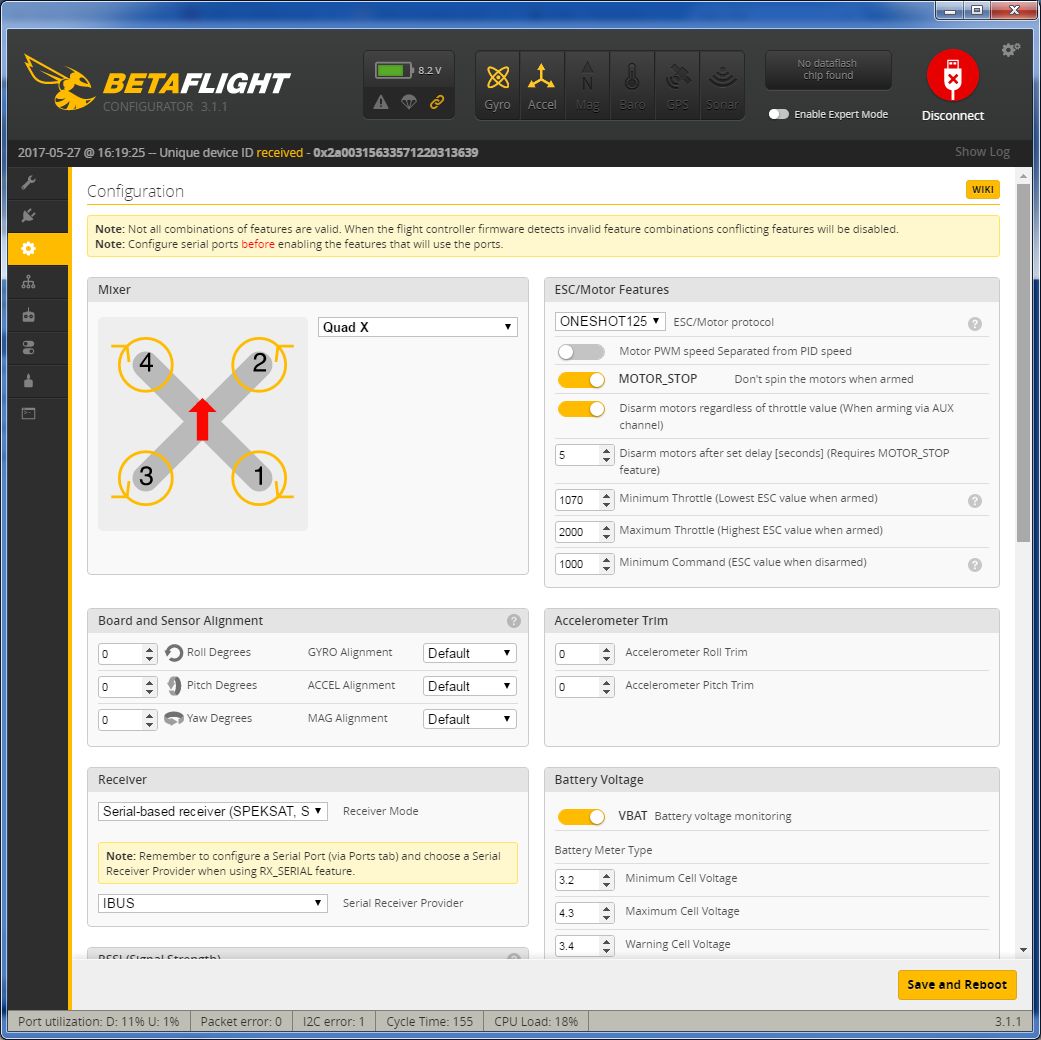
Betaflight alóli konfigolás
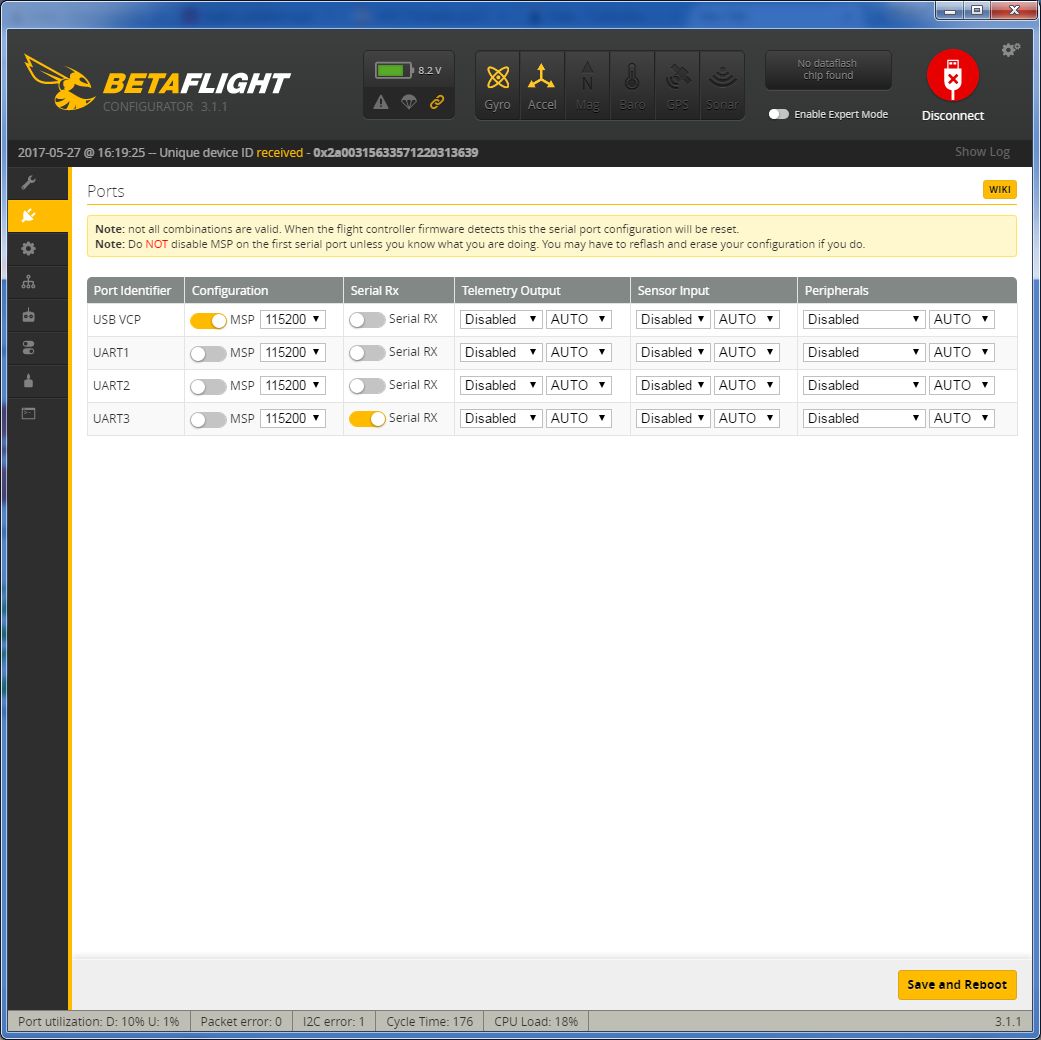
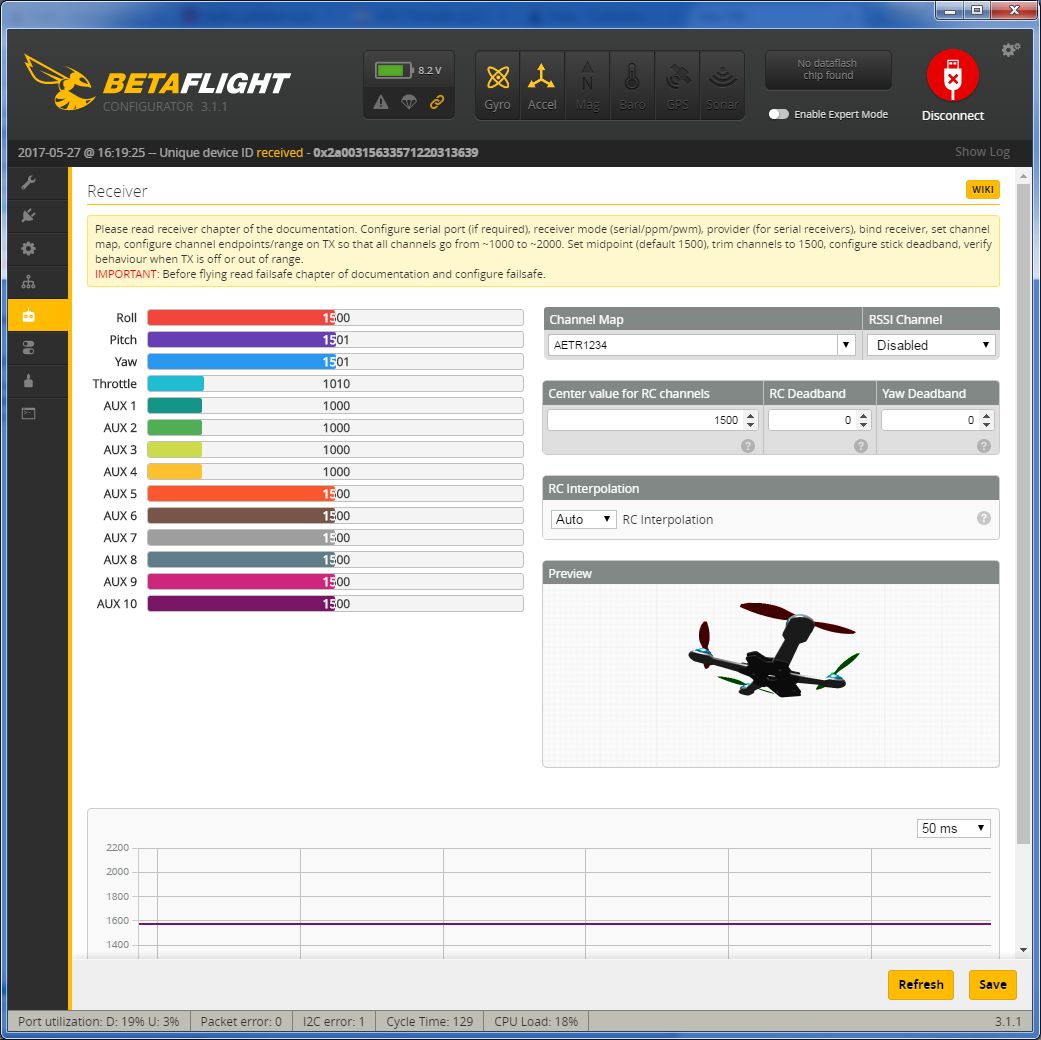
Párosítottam a vevőt a távommal, majd beállítottam a repvezérőlt Betaflight aló. A ports fülön megadtam, hogy az UART3-on várja a serial vevőmet, a receiver fülön beállítottam hogy serial vevőm van, a protokoll pedig az iBUS, mivel Flysky vevőm van. Aki részletes leírásra vágyik, az rágja át magát a Cleanflight gyorstalpalón, mivel ilyen alap dolgokban a Cleanfligth/Betaflight/iNAV triumvirátus megegyezik. Miután ez megvolt, ellenőriztem, majd beállítottam a vevő csatornáit.
A kiegészítő, azaz AUX csatornákat beállítottam az általam preferált módon:
AUX1 - ARM
AUX2 - BEEPER
AUX3 - STAB/HORIZON/ACRO
AUX4 - AIR MODE
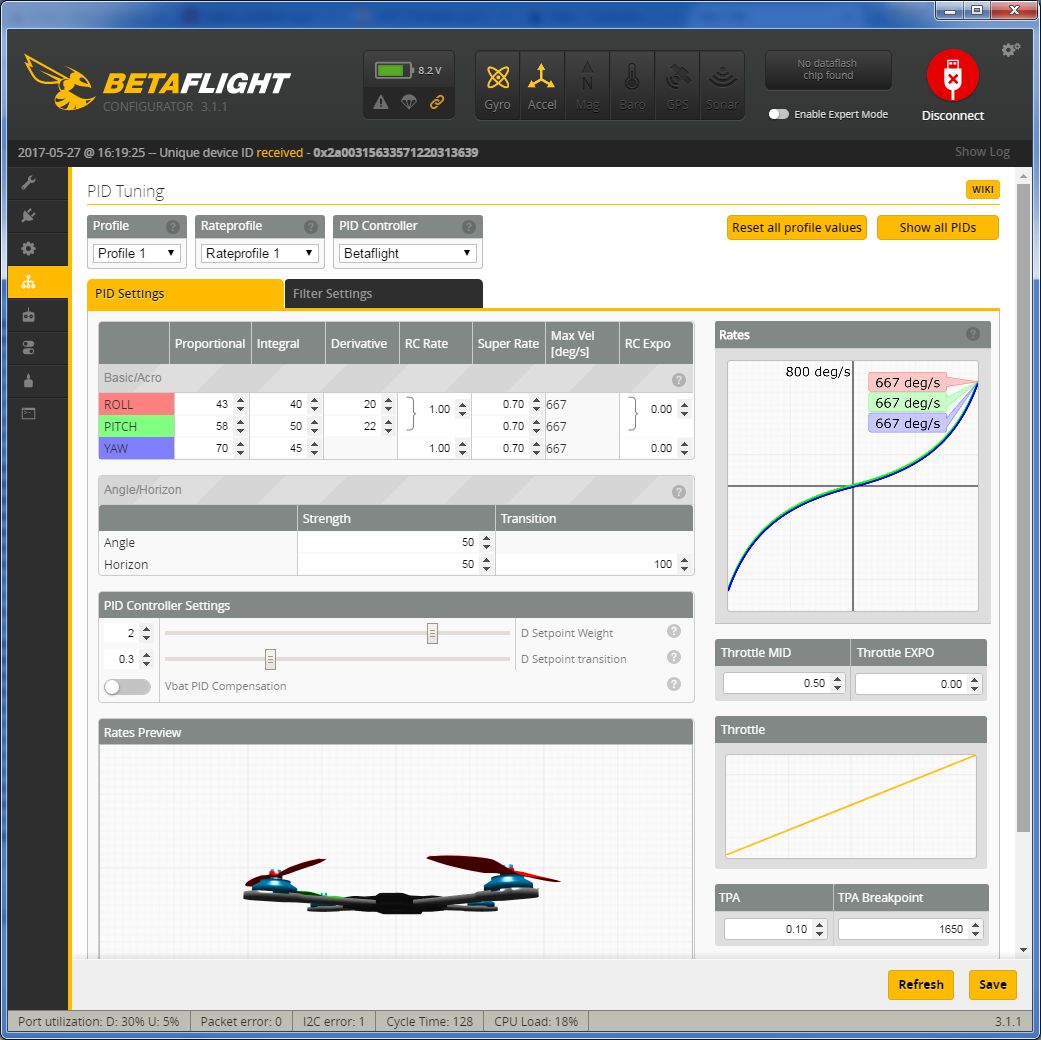
A motor stop bekapcsolásán kívül minden mást alapon hagytam, így az ESC protokollt Oneshot125-ön és PID-eket sem piszkáltam, mert kíváncsi voltam, hogy repül a gép alapbeállításokkal.



Végül kalibráltam a gyorsulásmérőt és az ESC-eket, és készen is volt a gépe a berepülésre.
A sólyomfióka berepülése
Repülés szobában, külső nézetben, stabilizált módban
Mivel nem volt 1,3-as imbuszkulcsom, így a gép első tesztjeit csak felrakott propellervédővel tudtam végrehajtani, ami 7g ballasztot jelentett. A szűzrepüléshez az ólomverébnél már bevált 300mAh 35C Giant Power akkukat használtam. Ezek az akkuk elég könnyűek, csak 18g-ot nyomnak. Stabilizált módban a gép elég szépen bedől, így meglehetősen nagy sebességet képes elérni, valamint elég extrém kitérőmanővereket lenne képes bemutatni. Ebben sajnos a propellervédő és az akku akadályozza, mivel előbbi jelentős súlytöbblet, míg utóbbi nem képes ezt elég energiával kompenzálni. Ez miatt nyélgáznál sem tör ki a kicsike, nincs olyan punchout amit egy racernél megszokhattunk. A repülési idő nagyon rövid, mindeössze 2-2,5 perc, ami még racer mércével is kevés.
 Rokonok. :)
Rokonok. :)
Kipróbáltam 1000mAh majd 700mAh akkukkal is, de azokkal benyugtatózott lajhárként viselkedik és nagyon melegednek a hátsó motorok, így maradtak a 300mAh akkuk a hurka repidejükkel. Az ólomveréb ugyanezekkel az akkukkal 4 perc körüli repidőt tud.
Szobában reptetéshez kicsit visszább kell majd venni a kopter kitérését vagy a Betaflightban vagy a távunk menüjében. A tengelye körüli fordulás bentre elég magas, ezt majd kintre kell csökkenteni. Az iránypöcök elengedése után a kopter meglehetősen gyorsan vízszintezi ki magát, szerintem ezt nem szükséges állítani.
Repülés kültéren, belső nézetben (FPV), acro módban
Kivittem a sólyomnövendéket a helyi focipálya melletti időszakos büféhez belsőnézetes akadálykerülgetéshez. Beüzemeltem az FPV sisakomat, befogtam a kamera adóját és indulhatott a csapatás. A kamera a paraméterei ellenére nagyon jó képet biztosít, ehhez képest a Racer 180 képe egy mosott kockahalmaz. Mondjuk rá nem is számítottam rosszra, mivel az Emax Nighthawk 280 pro-ból örkölte a KGB project a kameráját és az is kegyetlenül jól teszi a dolgát, még szürkületben is. A sisakommal rögzített videó rosszabb minőségű mint az élőkép, de az Eachine proDVR ennyire képes.
A gép acro módban nagyon jól terelhető, azt csinálja amit akarok, és méretei miatt minden kis zig-zugban elfér. A linkelt videó például az első acro repülésem harmadik felszállásánál készült. A propvédők súlya érezhető, nyélgáznál akadályozza a gép kitörését (punch-out) viszont megvéd, ha falnak csattan a masinánk. Apropó propvédő. Ezeken látszik, hogy a gép repülés közben bizony eléggé remeg. Az én teóriám szerint erről a műanyag váz tehet, ami messziről nem olyan merev mint a versenygépeknél használt karbon.
A videóadó hatótávja 25mW-os teljesítménye ellenére gond nélkül tudja a 100m-t, azonban a rádióvevő rendszeresen elvesztette a jelet olyan 30-40m-en. Mint kiderült, ez részben a féloldalas felhelyezésének volt köszönhető, részben annak, hogy az antennája túl közel volt a videóadó antennájához. A vevőt a videóadótól távolabb helyezve a hatótáv gondjaim megoldódtak.
OSD híján a fedélzeti csipogó figyelmeztet az akku merülésére, azonban gyakorlottabb pilóták ezt abból is észreveszik, hogy már nem húz úgy a gép, nincs elég emelőerő. Amikor már harmatosnak érzem a masinát, az akkukra rámérve a feszültség 3,82-3,87V között szokott lenni, ami pont a tárolási feszültséget jelenti.
Előnyök
- pici méret
- kefementes (brushless) motorok
- F3 EVO repvezérlő
- gyárilag jól repülhetőre bekonfigolt repvezérlő
- nehézsége ellenére aránylag jól repül
- strapabíró kasztni és propellerek
- jó minőségű kamera és videóadó
- kellemes, már-már cuki dizájn
Hátrányok
- nehéz propellervédő és valószínűleg ez miatt harmatos punch-out
- nehezen beszerezhető, 1,3mm-es imbuszfejű csavarok tartják a motorokat és a propellervédőket
- nem túl merev kasztni ami nem túl jelentős, de észlelhető remegést okoz
- csak kétoldalú ragasztóvel rögzített repvezérlő
- kevésbé elterjedt propellerméret
- a gyári propellereket nehéz felhelyezni
- nincs kialakított hely a csipogónak és a vevőnek, így improvizálni kell
- bentre kicsit ormótlanabb mint egy kefés zsebrészer
Szőrszálhasogatás
- nincs OSD, de van csipogó, akkor meg minek?
Előzetes verdikt
Az Emax Babyhawk egy nagyon strapabíró gépecske, ami mindenekelőtt a dizájnjával hódít. Bentre kicsit nehézkesnek tűnik, de a propvédők teszik a dolgukat, így sem magának, sem a környezetének nem nagyon okoz sérülést. A propellervédők miatt kintre viszont nem elég fürge, de amit tud, azt jól csinálja, engedelmeskedik a parancsoknak és a sugárzott videó is meglepően jó minőségű az ilyen pici kamerákhoz képest. Eléggé kellemetlen, hogy a csipogó beszereléséhez szét kell kapni az egész gépet, és ha nem Frsky vevőt rakunk a gépbe, meggyűlik a bajunk az elhelyezésével.
A fentiek miatt egyelőre nem túl meggyőző a gépecske, viszont még nem próbáltam ki hogyan repül propvédők nélkül és mi a helyzet háromcellás akkuval. Ezen kívül kutatom a netet 350-400mAh és magasabb C értékű akkuk iránt. 3S akkuim már vannak, holnap pedig veszek egy kulcskészletet mindenféle elvetemült csavarhoz, tehát a propvédő nem sokáig lesz fent.
A jövő hét folyamán jön tehát a második rész, addig is levegőbe fel!
Ha tetszett a bejegyzés dobj egy lájkot YouTubeon vagy Facebookon! Köszi!




