
Hogy készül a háztáji LopakoDrón - 3. rész
Hogyan NE építsük habröpcsibe elektronikát
Nyalni csak úgy lehet, ha élvezzük az ízeket...
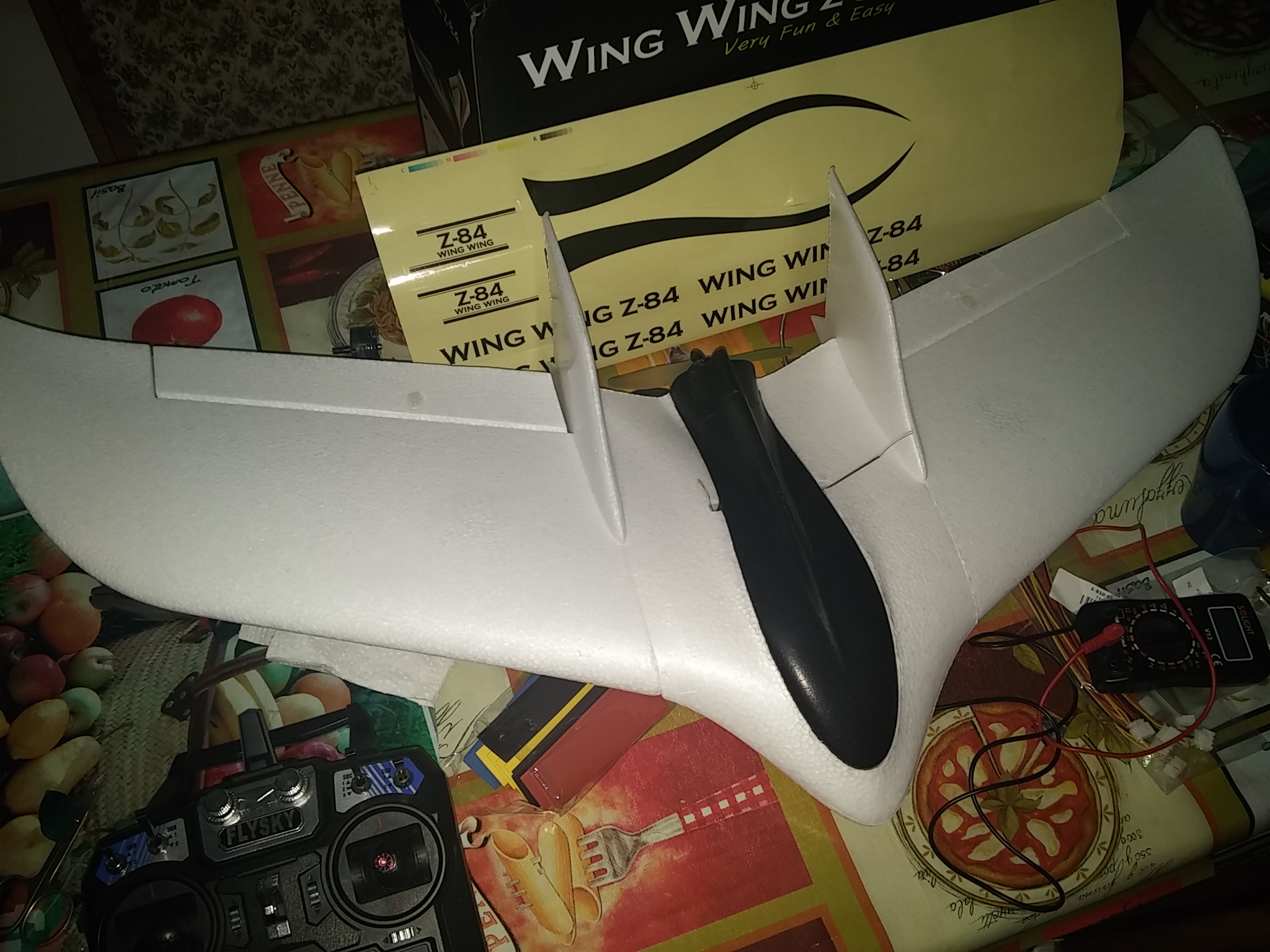
Múltkor ott hagytam abba, hogy összeállt a Z-84 géptest, én meg kezdtem magam profi habröpcsiépítőnek hinni. Hiába, a Dunning–Kruger hatás él és dolgozik. :)
A brushless motor beépítése
Beszerelés előtt összehoztam a Falcon 180 2204-es motorját és a 20A-os Flycolor Fairy ESC-jét, hogy megállapítsam a motor helyes forgásirányát. Nem akartam, hogy az önszorító anya letekerje magát, így a balmenetes motornak jobbra kellett forognia. Ennek kipróbálásához nem kell a repvezérlő, az ESC-et (magyarul elektronikus fordulatszám szabályzót, röviden szabit) elég egy PWM RC vevő azon csatornájára dugni, ami a gázkar állásáért felelős. A FlySky vevők esetén Mode 2-es pöcökkiosztásnál ez a 3. csatorna.

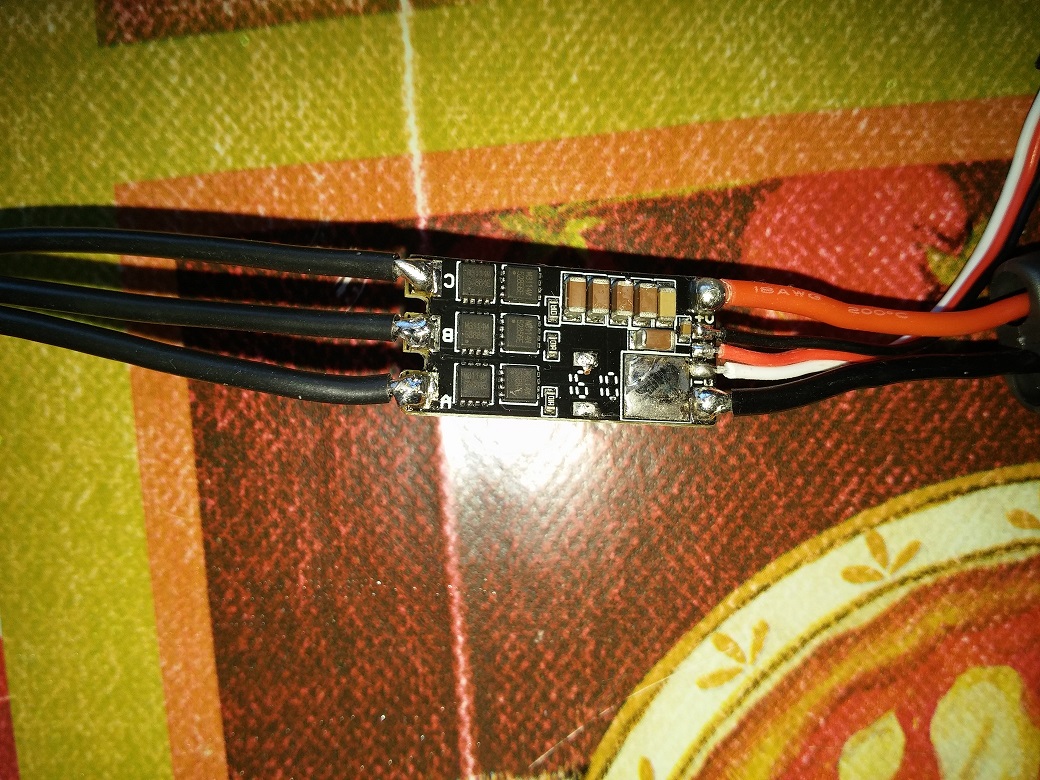
Fél órán keresztül szenvedtem, de az a rohadt vevő nem és nem akart életre kelni. Megmértem a szabi BEC, azaz 5V-os kimenetét, és kiderült 0V-ot ad a rohadék. Levágtam a zugsorcsövet az ESC-ről, és kiderült, hogy az 5V-os regulátor (kb. 7805) nincs beforrasztva. Kérdem én, akkor mi a jó életnek van kivezetve a piros vezeték?

Veletlenül (véletlenül???) volt otthon egy 5V-os UBEC 3A terhelhetőséggel, megtápoltam vele a vevőt, a motor felpörgött a jó irányban, király. Ekkor észrevettem, hogy sehogy nem tudom a röpcsi motortartóján áthúzni az ESC-et. Forrasztani forraszthattam volna, de ez nem túl szerencsés, mivel az EPO habot szempillantás alatt olvasztja meg a forrasztópáka, meg aztán egy kiégett motort is gyorsabb cserélni, ha oldható dugaszon csatlakozik a motor. Így esett a választásom a KGB projectből maradt EMAX MT2204-es motorra, mivel a NightHawk verzió gyárilag három pines JST-XH dugasszal érkezik. Ez ugyanaz a dugasz, ami az akkuk balancer csatlakozójának használnak. Véletlenül (jaj, ugyan már!!!) volt otthon három pines JST-XH dugasz, aminek kicsit meghajlítottam a két szélső lábát és felforrasztottam az ESC-re. A motor pont a megfelelő irányba forog, a JST-XH meg pont átfér a motortartón.
Szervók és elevonok
A csupaszárny repülőgépeken nincs külön csűrőlap és magassági kormány, hanem csak két elevon, ami ezek kombinációja. Mivel csak két vezérlősíkot kell mozgatni, elég két szervómotor is. A szervómotorhoz tartozik egy műanyag kar, amibe egy fém húzóka pattintható. Ez a húzóka egy csavarható műanyag pöcökben végződik, ami a csűrőlaphoz egy műanyag karon keresztül csatlakozik. A műanyag pöcök csavarásával állíthatjuk be a húzóka távolságát.
Az elevon kitérése attól függ, hogy a szervókar illetve az elevon tartókájának melyik lyukába csatlakoztatjuk a fém húzókát az alábbiak alapján:
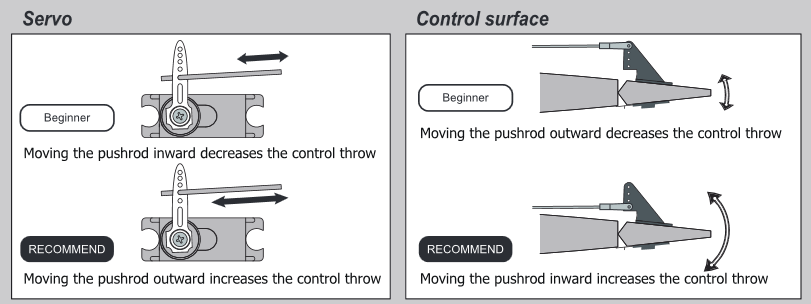 forrás:http://www.newzeta.com
forrás:http://www.newzeta.com
A szervómotorok beépítése
Én a közepes kitérés mellett tettem le a voksom, de ekkor szembesültem azzal, hogy a szervókaron túl kicsi a lyuk. Fogtam egy körömollót és megoldottam.
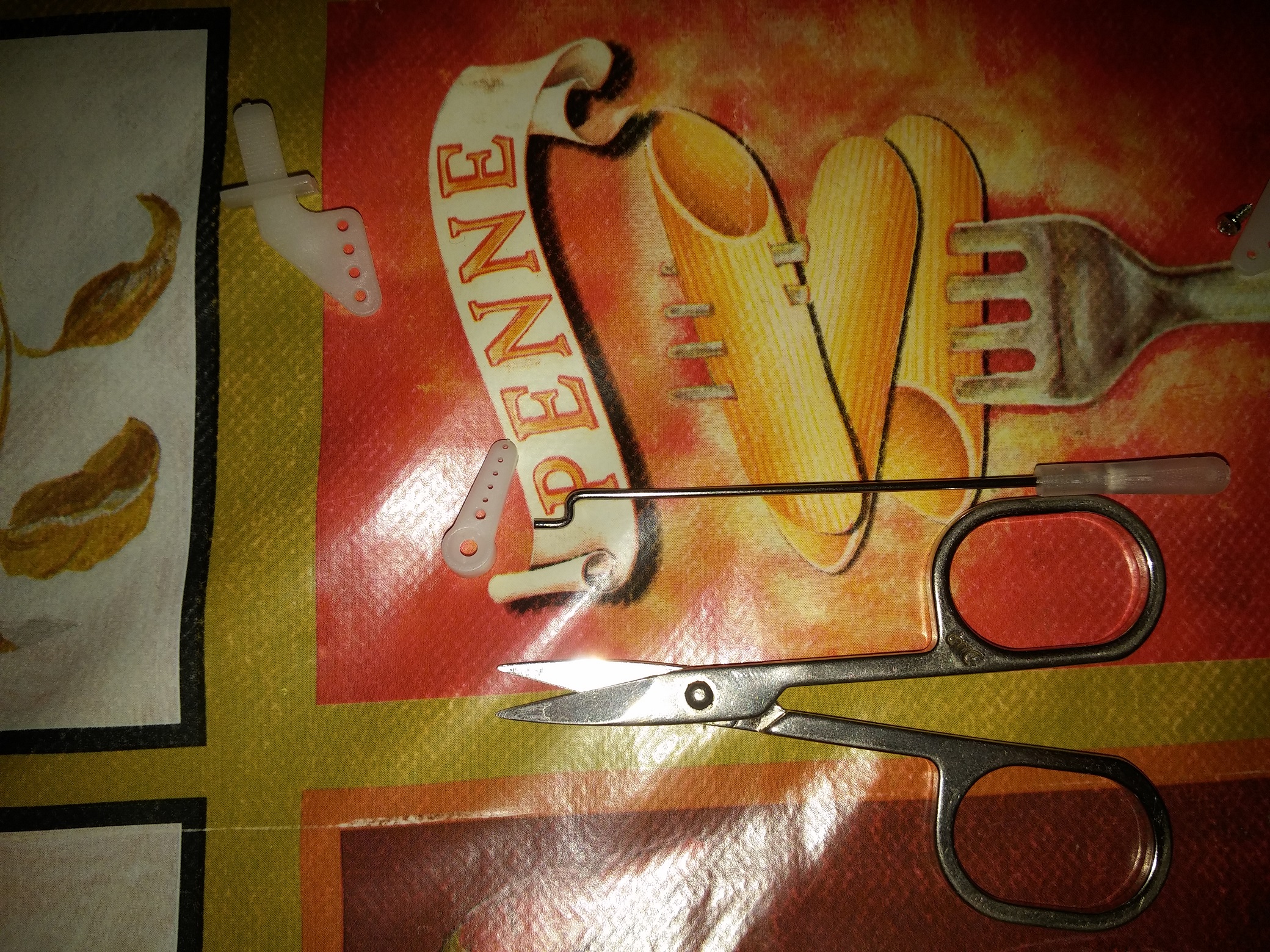

A szervóra középállásban felhelyeztem a húzókart majd rögzítettem a szervóhoz kapott csavarok közül a legrövidebbel. Bepattintottam a húzókát az elevonba belenyomtam az elevon karját. Addig pödörtem a húzókán a műanyag elemet, míg helyére pattintva az elevon a szárnnyal egy szintbe nem került. Úgy tűnt, hogy minden klappol, így jó alaposan beragasztottam a szervókat a helyükre. Jöhetett a próba.
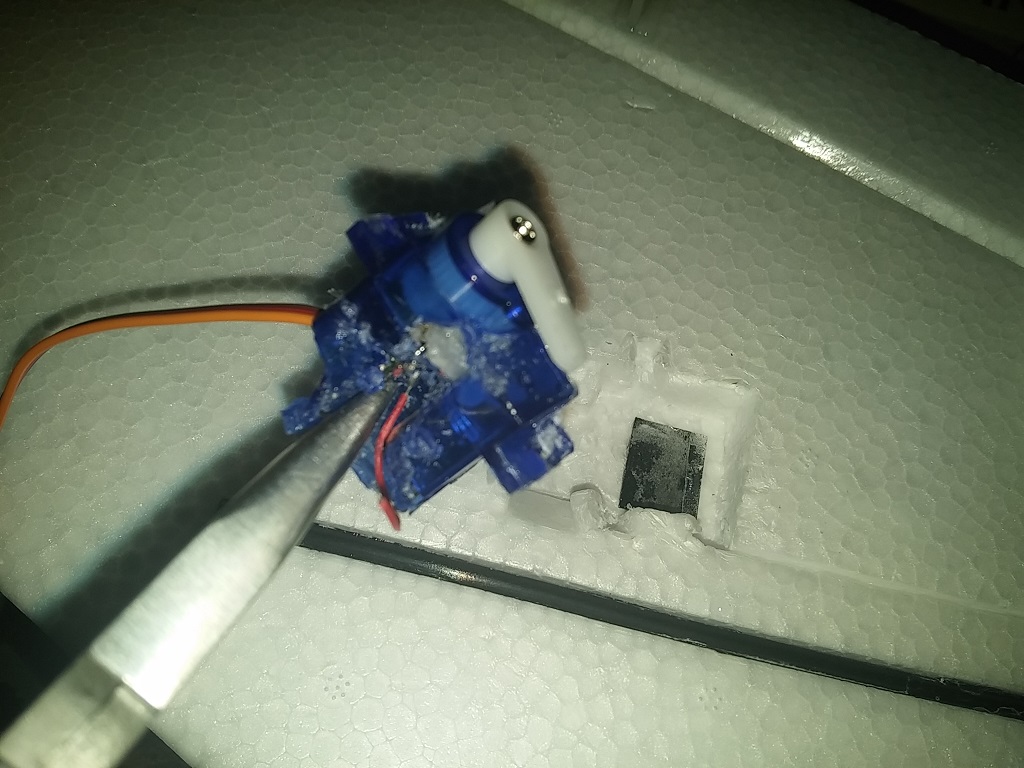
A szervómotorok tesztelése - oral de luxe
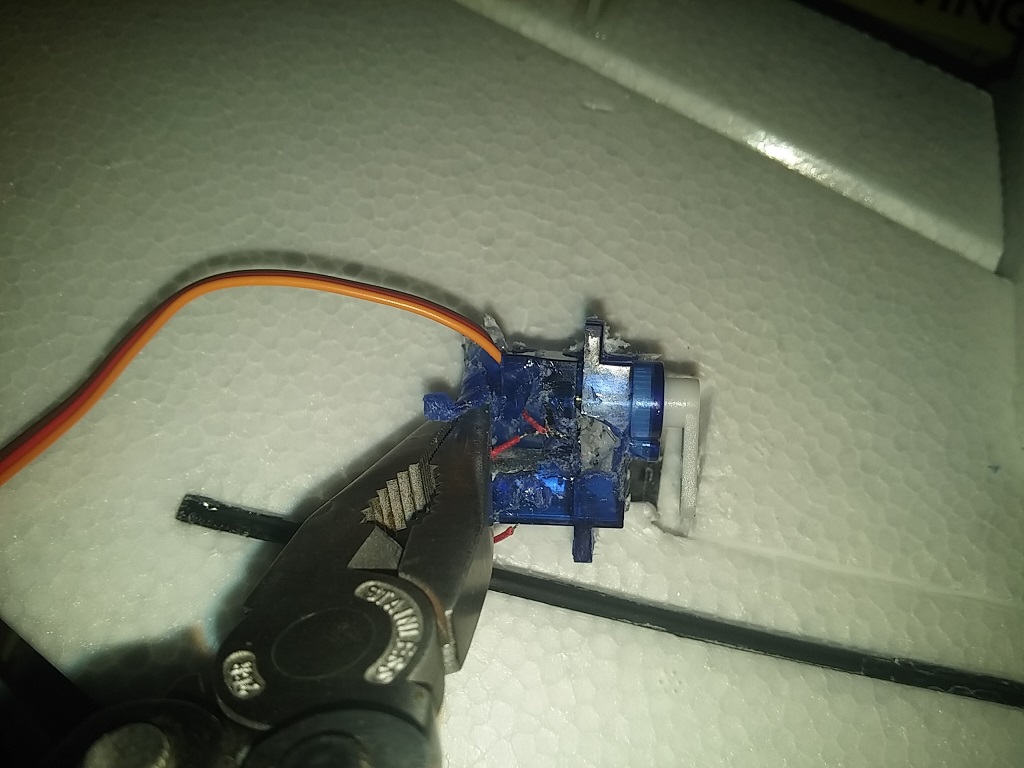
Fogtam a szervókat rádugtam az RC vevőre, majd konstatáltam, hogy az egész szervós dolgot elb*tam. Nem kicsit, nagyon. Mint kiderült a szervómotork a csomagban nem középállásban voltak, így a vevőtől megkapva a jelet megpróbálták magukat középállásba tenni. A jobb oldali picit csálén állt, de nem túl vészesen, a baloldali szervó azonban a beakadt géptestbe és kiégett. Rágugliztam a neten, mit lehet ilyenkor tenni. Kiderült, ki kell vágni a szervót. Fogtam egy szikét körbevágtam a szervó mentén a habot, de nem és nem akart kijönni a rohadék. Ekkor úgy döntöttem, hogy szétfúrom és darabonként szedem ki. Ez már sikerült.




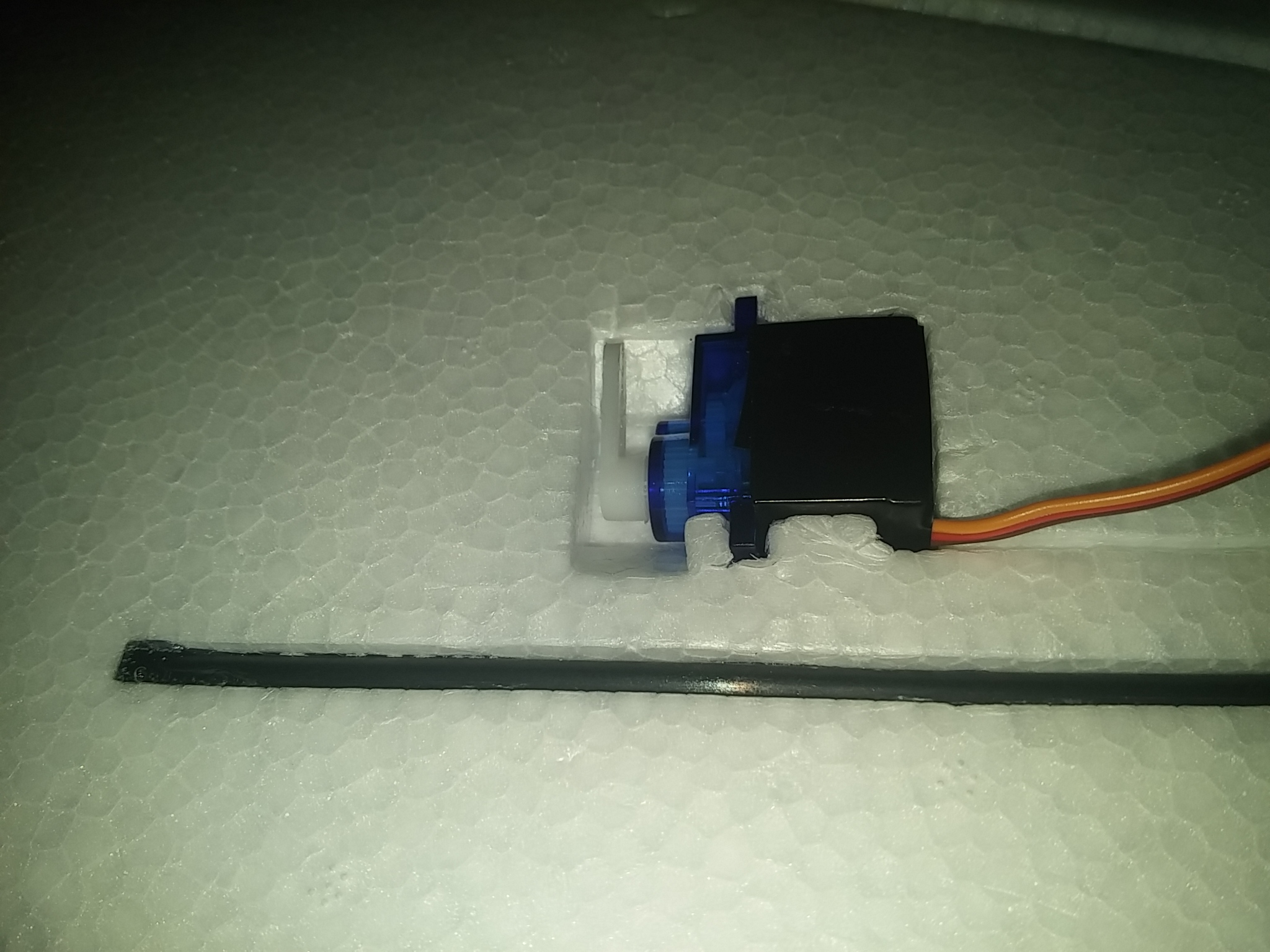
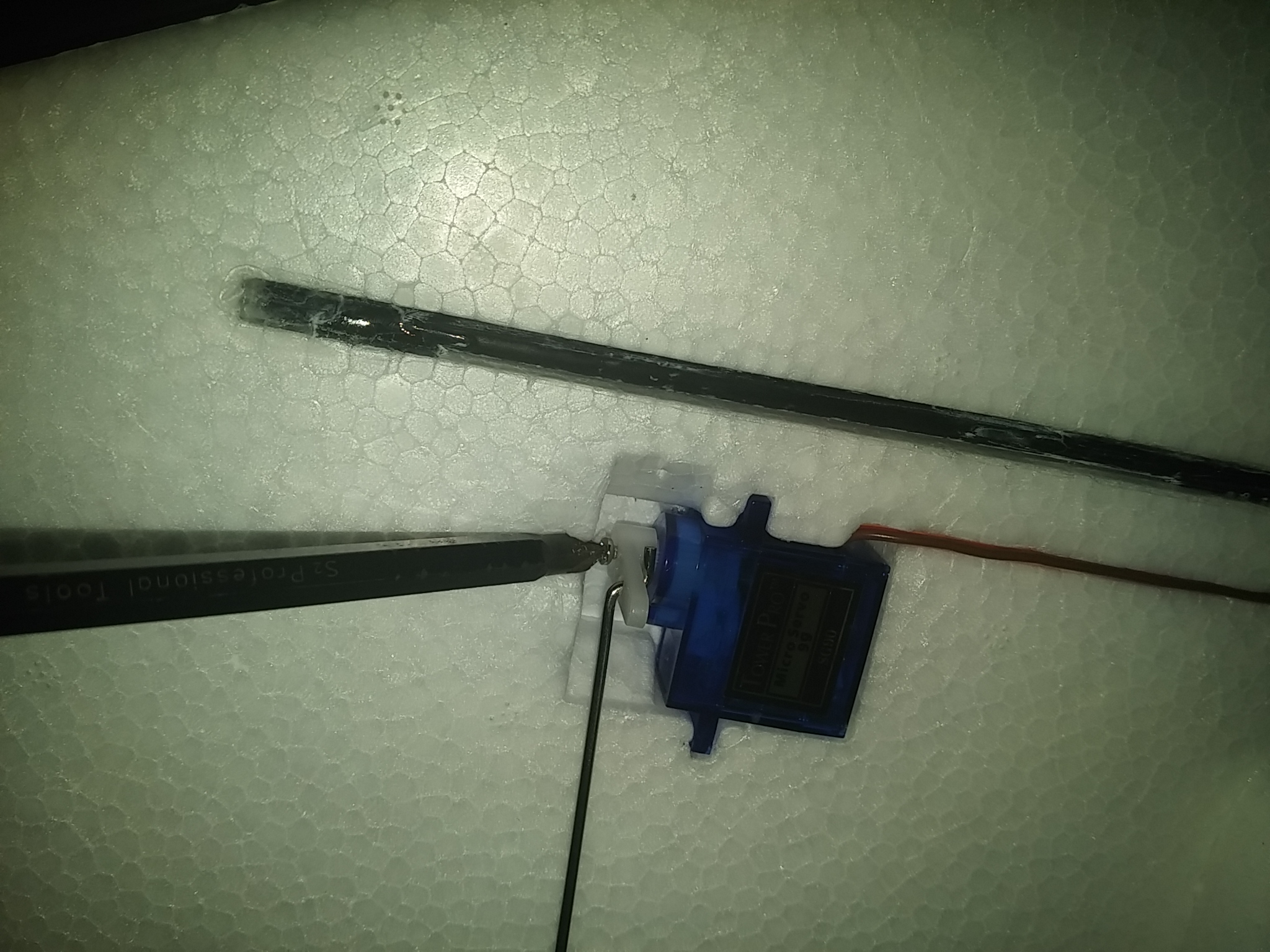
Még szerencse, hogy három SG90 szervót rendeltem múltkor a GearBest-ről, mert helyben agyvérzést kaptam volna. Mivel nem akartam mégegyszer elkövetni ugyanazt a hibát, rákötöttem a szervót a rádióvevőre, és miután felvette a középállást, csavaroztam fel a karocskát. Ezután visszatettem a helyére és megnéztem nincs-e galiba a végállásokban. Szerencsére nem volt. Mivel nem akartam újra körbevágni a habot, ha megsülne a bal szervó, így körbenéztem RC Groupson mit csinálnak a profik. A legszimpatikusabb az volt, hogy be kell tekerni a szervót szigetelőszalagba, majd úgy ragasztani be. Csere esetén elég elvágni a szigszalagot, és a szervó könnyen kiszedhető. Szigszalag fel, középállás, végállás mégegyszer ellenőriz, szervó beragaszt, örül.




A másik szervót nem akartam kicibálni, így oldalról benyomtam a habot és kicsavaroztam a karocska csavarját, majd a jó állásban tettem vissza. Mi tagadás, nehéz menet volt.
Még egy hibát elkövettem. A baloldali elevon karját beragasztottam, mielőtt a felső szorítót ráhúztam volna. Pár csepp ragasztó ugyanis ráfolyt a karra, így nem tudtam ráhúzni felülről a leszorítót még fogóval sem, de sikerült megvágnom az elevont. Nem volt őszinte a mosolyom. Végül mind a tartókát mind a karocskának az elvont átszúró részét sikerült annyira megreszelnem, hogy összejött a mutatvány. A megvágott elevont és a húzókart megerősítettem ragasztóval, remélem nem hullik majd szét.
Propeller és szervómix választás
Mivel a Z-84-en a motor hátul helyezkedik el, így a propellernek tolnia kell a gépet, nem húznia, mint egy kvadkopteren. Éppen ezért a Diatone 5030R propeller helyett 5030-at helyeztem fel. Arra kell vigyázni, hogy a géptest felé kell állni a propeller domború felének, míg hátrafelé a homorúnak. Költségként nem számolom fel, mert csak a forgásirány tesztelése erejéig raktam fel őket. A gázra a röpcsi előre tolja magát, tehát öröm és boldogság van!
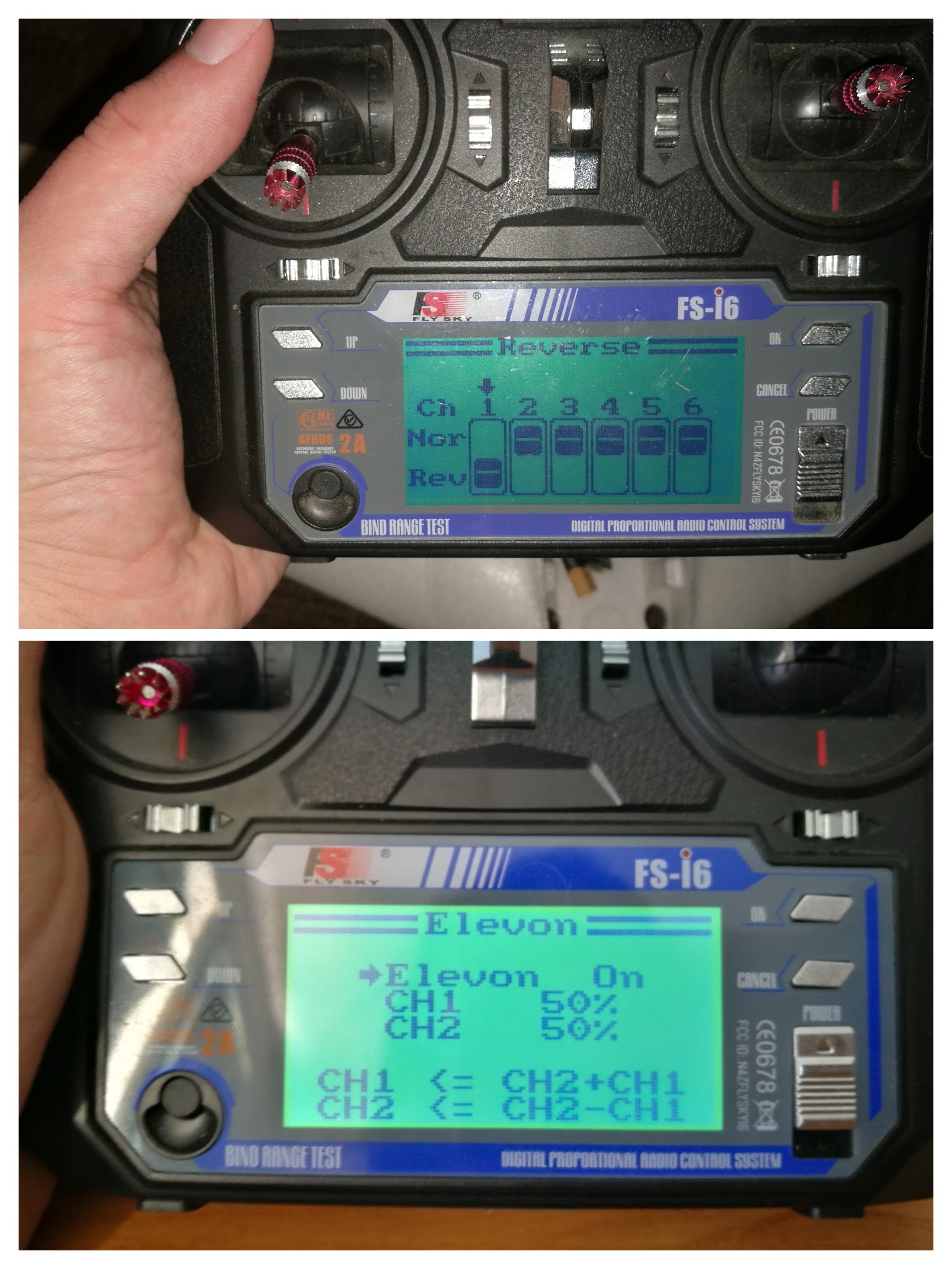
A gép felokosítása előtt úgy döntöttem, kipróbálom hogy viselkedik a gép normál habröpcsiként. Ehhez azonban be kellett állítanom a távon a szervómixet, amire az elevonok miatt van szükség. Az RC vevő első csatornájára a bal szervót, a második csatornájára a jobb szervót, míg a harmadikra az ESC-et kötöttem. A táv menüjében kiválasztottam az elevon szervó mixet, majd addig játszottam az első két csatorna reverzálásával, míg azt nem csinálta, a röpcsi, amit akarok:
- ha előre nyomom a jobb pöcköt az elevonok lefelé buknak
- ha magam felé húzom, felfelé fordulnak
- ha balra húzom a bal felmegy a jobb pedig le
- ha jobbra húzom a jobb megy fel, a bal pedig le
Vizuális típusok kedvéért az előbbi procedúra a HobbyKing előadásában:
Kiegyensúlyozás
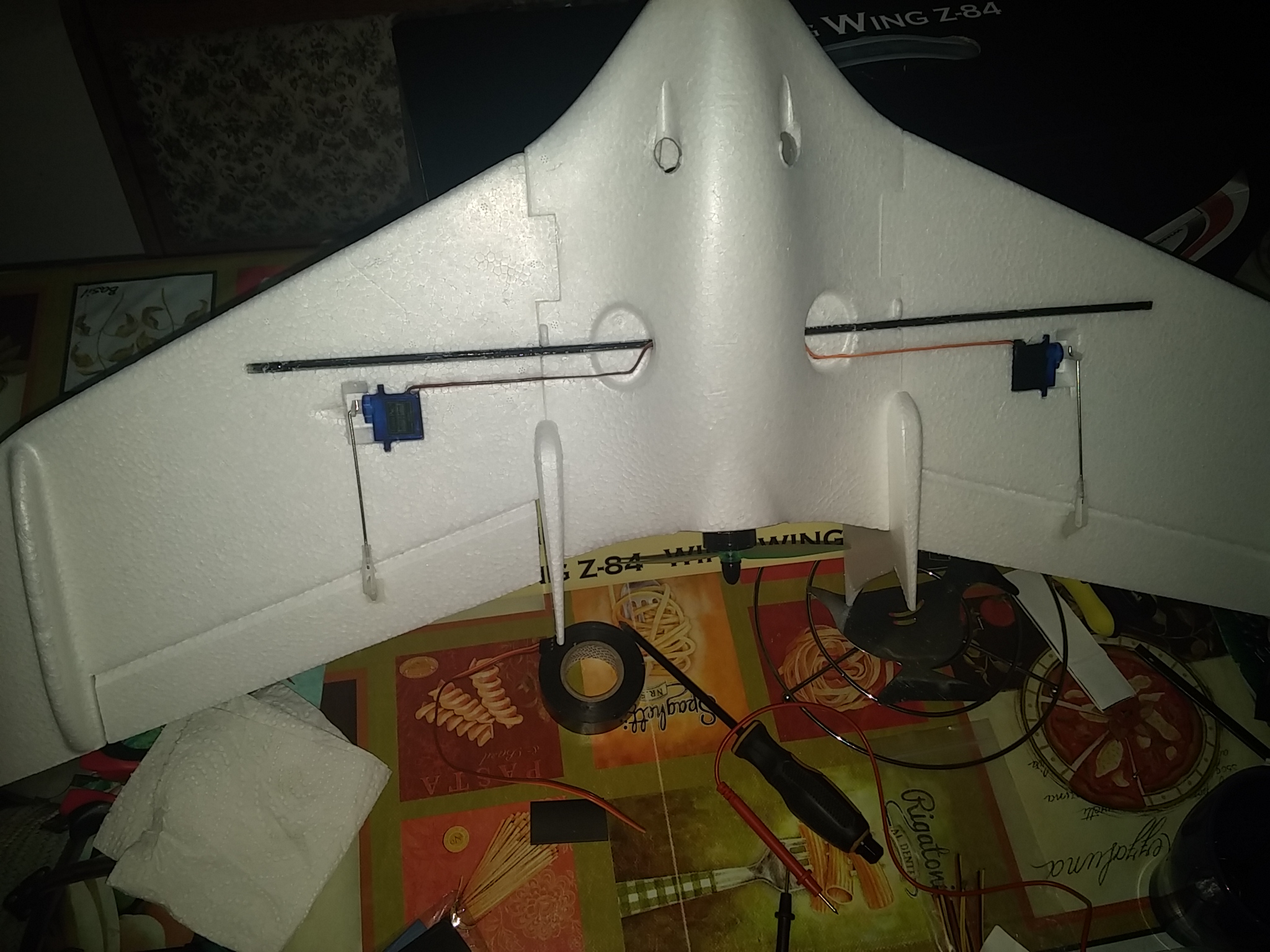
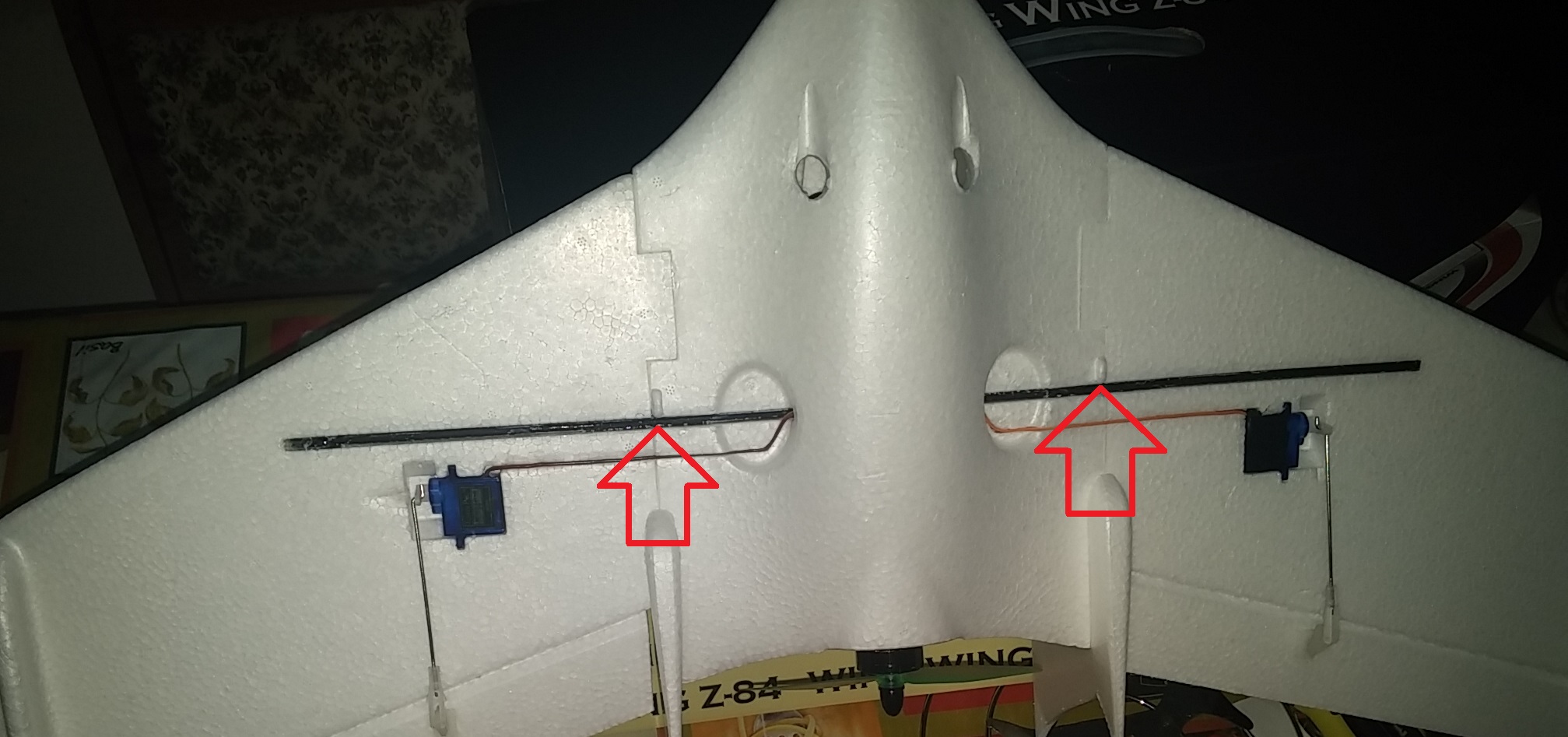
Utoljára maradt a röpcsi kiegyensúlyozása. Ez azt jelenti, hogy addig tologatjuk az akkut és a többi alkatrészt, míg a röpcsit alátámasztva a szükséges pontokon vízszintesen marad. Ezek a pontok a Z-84 esetében a szárnyat merevítő karboncső előtti dudorok, amit az alábbi képen piros nyilakkal jelöltem.
Egyelőre még nem döntöttem el, hogy milyen akkut fogok használni, és hol lesz az FPV szett és a Runcma HD, így ezzel a résszel még adós maradok, de nem sokáig!
A röpcsi lényegében repülésre kész, mostmár "csak" fel kell okosítani. A legközelebbi részben az iNAV-é lesz a főszerep, de az autonóm repüléshez szükséges GPS-ről és az élőkép közvetítéséhez szükséges FPV szettrl sem feledkezek majd meg. ;)
Ha tetszett a bejegyzés dobj egy lájkot YouTubeon vagy Facebookon! Köszi!




