
Hogy készül a háztáji LopakoDrón - 3,5. rész
a buta habrepülő felokosítása
Eléggé sokatokat érdekelt, mégis hogy a tökbe lett a Z-84, az SP F3 és az iNAV egyesített hatalmából a Bolygó kapitánya a Lopakodrón.

Ahogy az első három részből megtudhattátok, a felokosítás előtt a röpcsiben lévő elektronika nem volt túl sok:
Egy Emax MT2204 motor, egy Flycolor Fairy 20A ESC a motor szabályzásához, két 9g-os szervó, egy iA6 PWM vevő és egy 5V-os UBEC a szervók és a vevő táplálásához. Ezzel azonban a masina nem fog hazatérni magától, sőt, bárminemű stabilizáció híján még az irányítása is kihívást fog okozni egy olyan röpcsiszűznek, mint én. Így hát bele kellett szuszakolni pár cuccot.
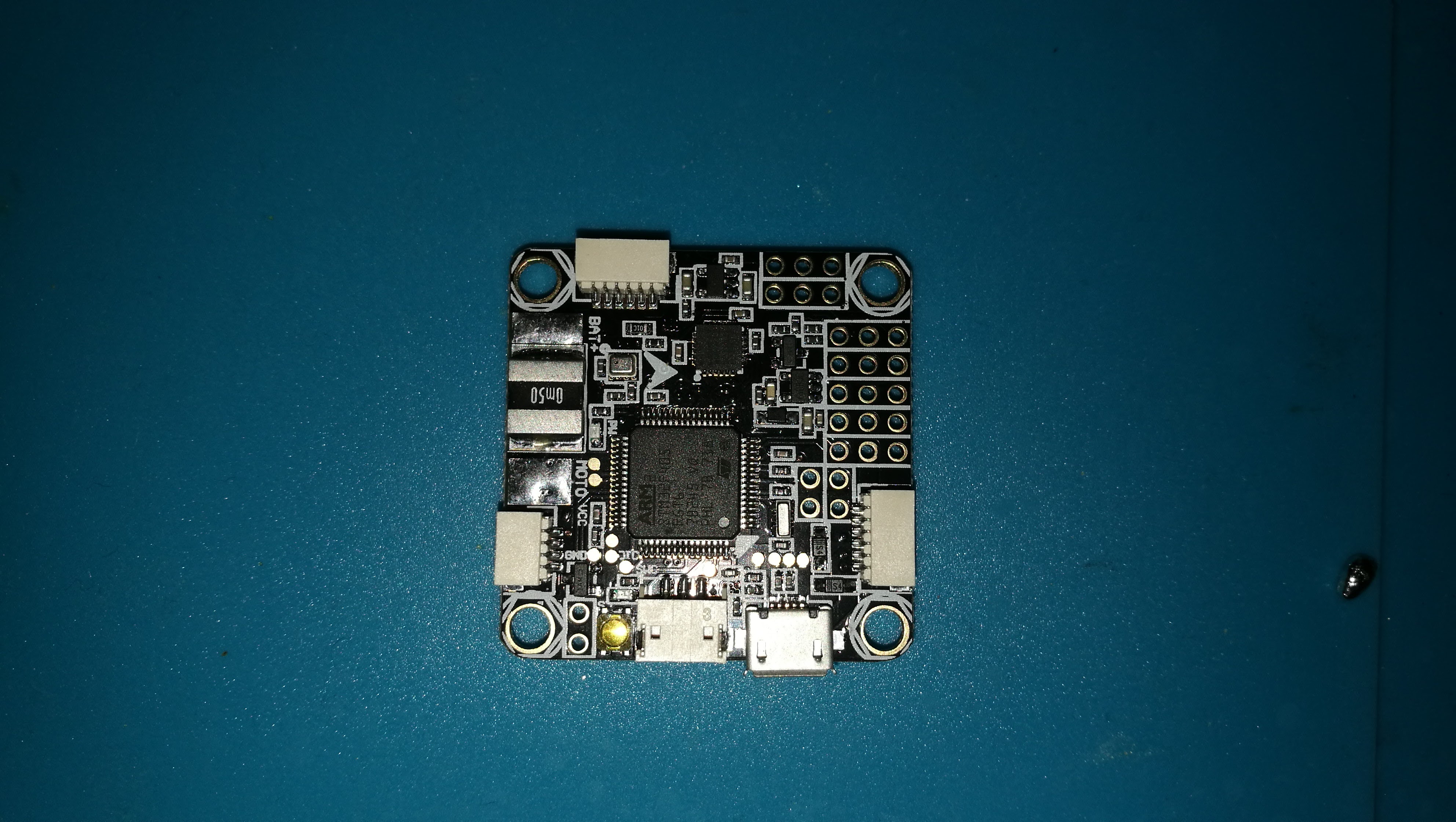
Az első Z-84 videómban említem, hogy a röpcsi agyát egy 10DOF SP F3 mini biztosítja. Ez nem más, mint a jól ismert SP Racing F3 magnetométerrel és magasságszenzorral ellátott, kicsinyített kínai klónja. Ma már nem nagyon kapható, nem is túl modern, de akcióban vettem 12 dolcsiért, ami nem volt rossz üzlet. Ez a vezérlő közvetlenül a szárnyat merevítő karboncső elé került, hogy közel legyen a tömegközépponthoz.
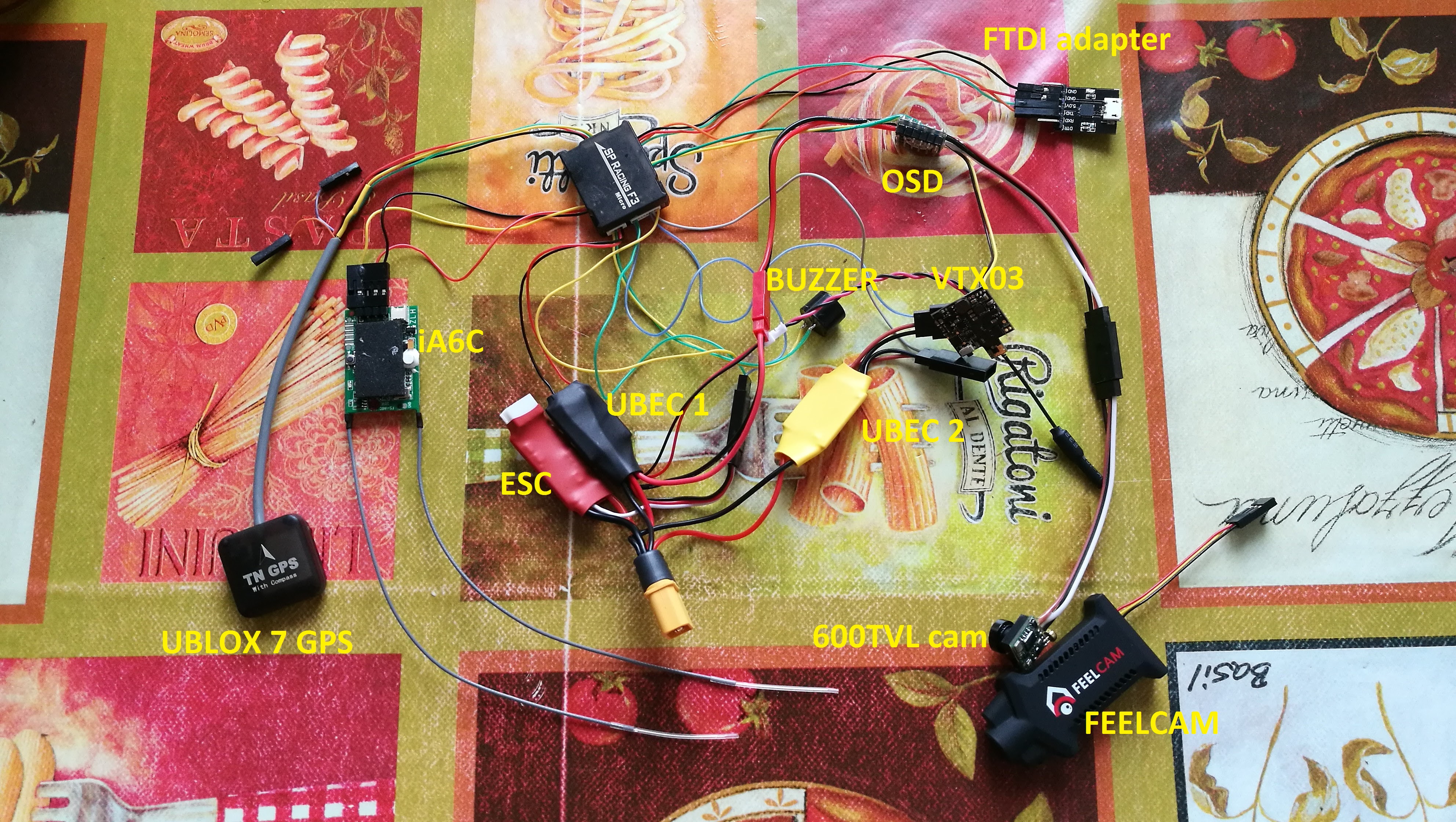
Az UART1-en csatlakozik az FTDI adapter, amivel az USB-re lehet csatlakozni. Ezt, amikor nem használom, a géptörzs oldalára ragasztom egy kétoldalú ragaccsal.
UART2-őn csatlakozik a micro minimOSD, ami a videójelre írja ki a repülési információkat és rajzolja fel a műhorizontot. Az OSD-t bekentem átlátszó folyékony szigetelővel a nedvesség ellen, és hogy megakadályozzam a kábelok elcsúszását vagy kiszakadjanak a forrasztási pontokról. Az OSD konfigurációja majdnem teljesen megegyezik a KGB project-ével, tehát MWOSD 1.6 fut rajta, de a #define ROTORCRAFT helyett a #define FIXEDWING elől szedtem ki a kommentet. Azért maradtam 1.6-on, mert az MWOSD 1.7 konfigurátora már fizetős, és az 1.7 nem megy az 1.6 konfigurátorával.
A videóban és a konyhaasztalon még az UART3-on csatlakozott az OSD, azonban az SP F3 dokumentációjából kiderült, hogy az UART 3 nem képes hosszútávon elviselni, ha egy eszköz 5V-on akar vele kommunikálni, a micro minim OSD meg pont 5V-os jeleket küld. Az ne tévesszen meg minket, hogy a tápfeszültsége az összes UART portnak 5V, én most az RX/TX lábakon tolerált feszültségről beszélek.
UART3-on csatlakozik az iránytűvel kombinált UBLOX 7-es GPS. A magnetométert nem kötöttem be, mert egyrészt összeakadna a fedélzeti iránytűvel, másrészt egy repülőgéphez tök felesleges. Mivel egy repülőgép jó esetben mindig mozgásban van, a központi egység a gép azimutját a GPS koordináták változásából számolja ki. Ha már itt tartunk, barométer sem feltétlenül szükséges, mivel a röpcsi elég GPS szatelit esetén a magasságát is meg tudja határozni. Ez az úgynevezett 3D GPS lock.
Többen is rámírtatok Facebookon, hogy honnan szerezhetitek be az általam használt GPS-t. A válaszom az, hogy nem érdemes utána kutatni. Az Ublox 7-es GPS-ek ideje lejárt, érdemes inkább Ublox M8N és felette kutatni. Ezek már az amerikai GPS rendszer mellett már támogatják az orosz GLONASS-t és némelyik már az európai Galilei-t is. Arra vigyázzatok, hogy sok csak 3,3V-on hajlandó üzemelni és 5V-on elfüstöl. Például a Beitian BN-880 jó választás lehet, mert tolerálja az 5V-os tápfeszültséget is és iránytűt is tartalmaz, ha kvadkopterhez szeretnénk használni.
Az F3 ESC / szervó kimenetei közül az első megy az ESC-re, a második üresen marad, mivel az a 2. motor szabályzójára menne. A 3. ill. a 4. kimenet pedig a bal ill. jobb szervókra csatlakozik.
Mint a videóban mondtam, nem akartam kockáztatni egy drága FPV szettet, így egy filléres Eachine 600TVL mikrokamera és egy félig döglött VTX03 biztosítja az élőkép átvitelét, ami a JJRC X1-nél már bizonyított. Róluk ebben a cikkben írtam bővebben. Mindkét kütyü 5V-ot kér. A kamera és a VTX is kapott folyékony szigetelőt, ami pár hete bizonyította, hogy nem feleslegesen nyitottam ki a tubust. A LopakoDrón egy jó kis esőben teljesen elázott, de a kintre szerelt VTX és kamera gond nélkül bírta a strapát.
Vevőnek egy Turnigy iA6C került felhasználásra, ami PPM-en csatlakozik, mivel elfogytak a soros portok az SP F3 minin.
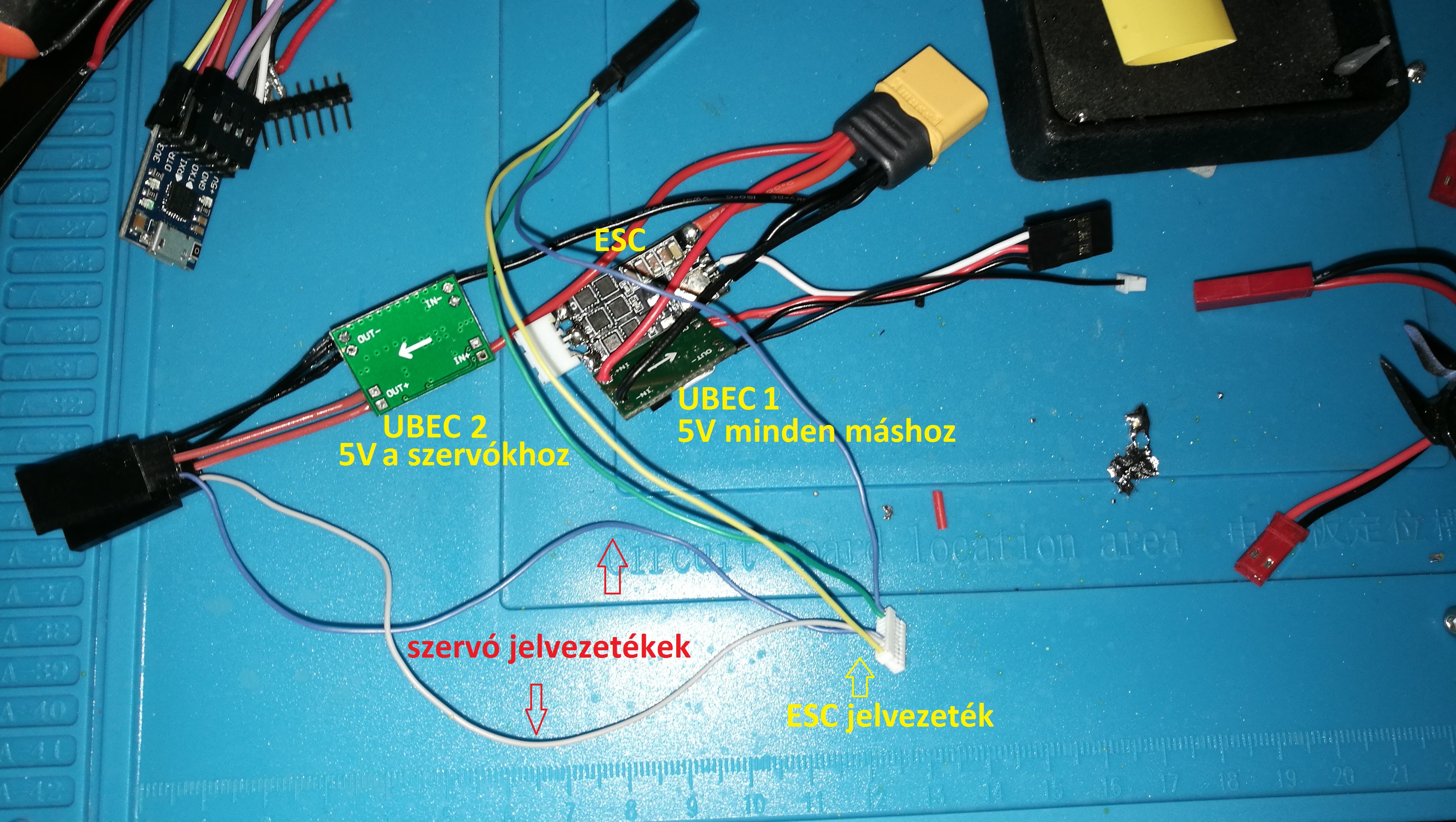
A gépben immáron két 5V/3A-os Bluesky UBEC van. A képen 2-vel jelölve csakis a szervókat eteti, az 1-es pedig a szervókon kívül minden mást táplál, tehát a repvezérlőt, azon keresztül a GPS-t és a rádióvevőt, egy külön ágon pedig az VTX-et és kamerát valamint az OSD-t is. Erre azért van szükség, mert a szervók elég energiaigényesek tudnak lenni, ha túlmozgásosak a nem jól beállított PIFF kontroller miatt, esetleg megszorulnak. Ekkor leeshet az 5V-os ág feszültsége, és ha ezen van a repvezérlő is, akkor bizony repülés közben újraindulhat, ami az álmoskönyvek szerint nem jó jel.
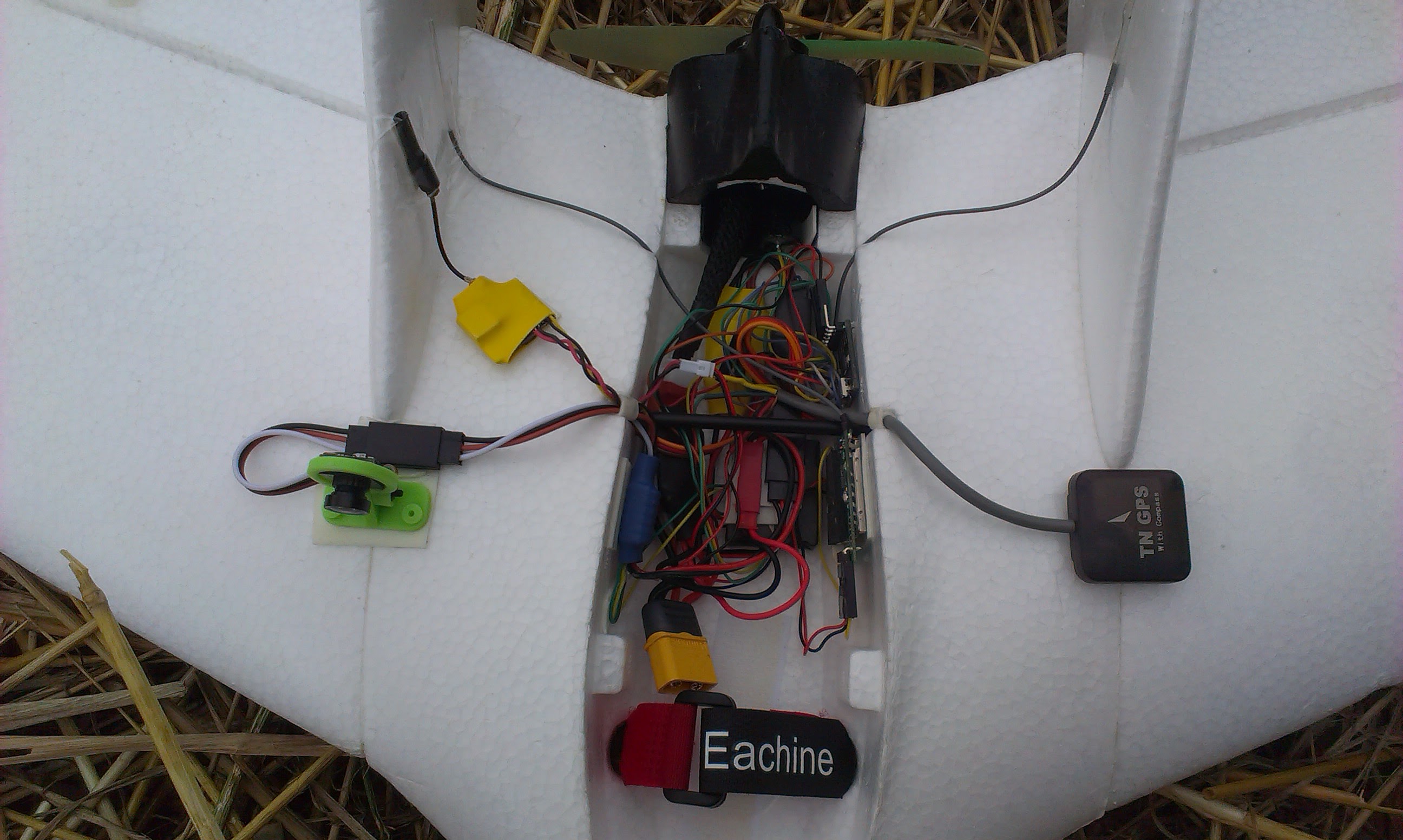
A maradék kütyü beépítve elég durva látványt nyújt. Van, aki szerint a gép belseje egy szénakazalra, mások szerint egy patkányfészekre hasonlít. Nem véletlen, hogy a Sky Shadow-ba már egy Omnibus F4 fog kerülni, amit már a FB falamon a mennybe menesztettem. A sok alverzió közül a V2 pro-ra került a választásom, mivel az beépített UBEC-et és árammérőt is tartalmaz. A KGB projectbe pedig egy Omnibus F7 fog kerülni valamikor az ősz folyamán.
Mellesleg annyi variánsa és alverziója van az Omnibus családnak, hogy megérdemel egy külön cikket.
A következő rész az iNAV és a csupaszárny röpcsik intim viszonyába fog belekotnyeleskedni. Készítsetek be elég ételt, italt, hosszú lesz. Míg meg nem jelenik, addig mindenképpen olvassátok el a KGB project esetét az iNAV-al, szükségetek lesz rá!
Ha tetszett a bejegyzés dobj egy lájkot YouTubeon vagy Facebookon! Köszi!




