Hát aki mostanában járt kint az tudja, hogy bizony itt a tél. Ilyenkor a kutyát nem csapjuk ki, nem még magunkat. Mit lehet ilyenkor tenni? Hát szimulátorozni!
Ezeket irányíthatjuk hülyegyerek módjára billentyűzetről, de akinek több agysejtje van egy marék lepkénél már rájöhetett, hogy rendes kontroller nélkül ennek nincs értelme. Szerintem racer szimulátornak, mint például a Liftoff még az XBOX 360 gamepad is kevés lesz. Felmerül a kérdés, hogy mégis mit használjunk? A válasz pedig:
A saját távirányítónkat.
Ehhez több lehetőség áll előttünk:
1. veszünk távunkhoz egy erre szolgáló szettet. Nekem a FlySky i6-omhoz ez a szett vált be.
2. Készítünk egy szimulátor kábelt magunk. FlySky i6 esetén ehhez kell egy s-video dugasz vagy két gyufaszál, egy mono jack és némi kéteres kábel.
3. valódi geek módjára rákötjük a PC-re az egyik PPM vevőnk és drót nélkül szimezünk.
Az első ponthoz nem kell sok faragás. Bedugjuk a távunk trainer portjába a megfelelő dugaszt, a PC-be az USB-s kütyüt, felinstalláljuk a drivert és kész.
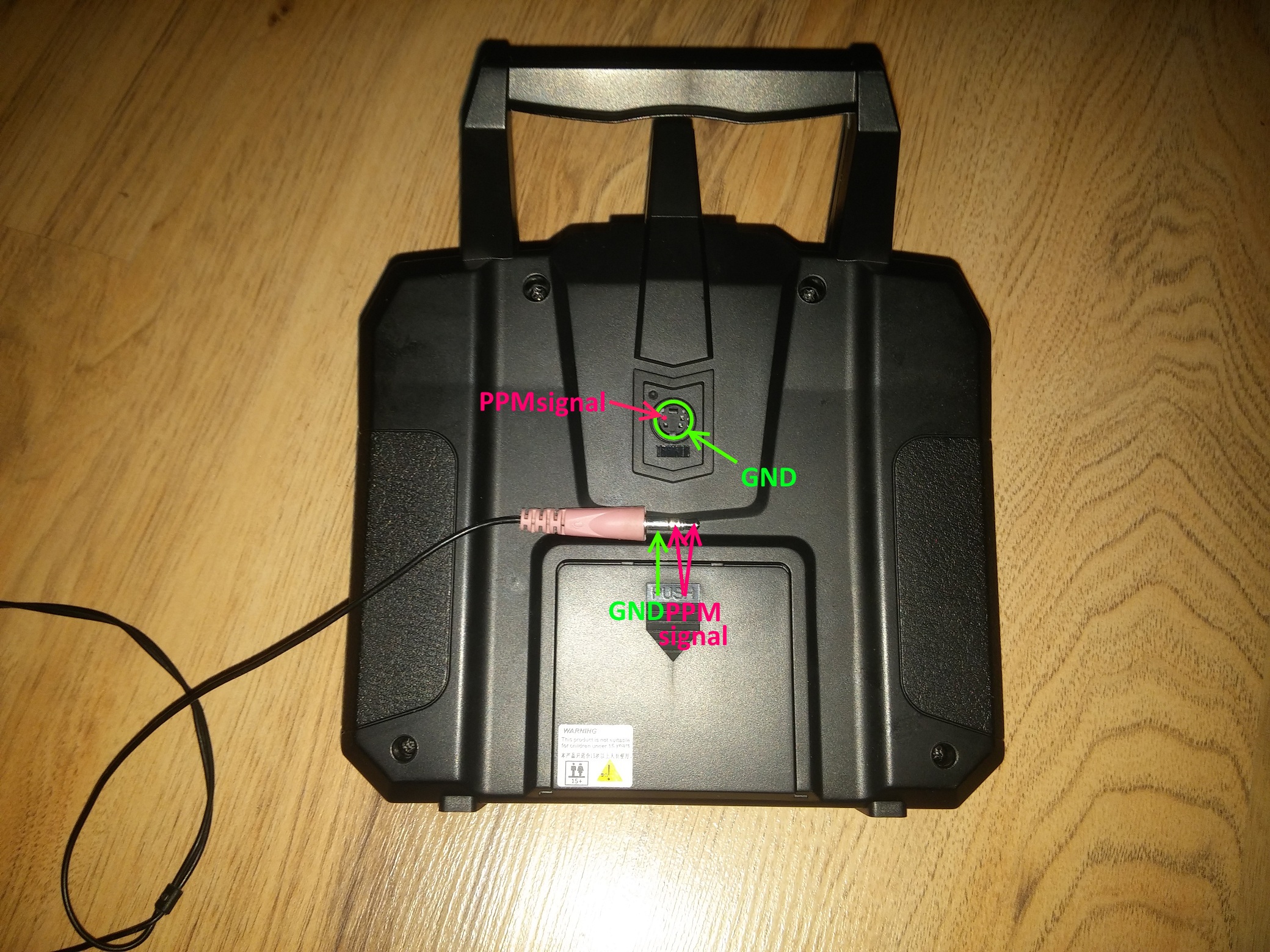
A második és harmadik módszer lényege a PPM kimenet, amit vagy a távunkból tudunk kinyerni a trainer porton keresztül vagy a vevőnkből a megfelelő kimeneten.A PPM-rő azt érdemes tudni, hogy csak két vezetéket használ. Az egyik a jel, a második pedig a föld. Nincs más dolgunk, mint egy jack dugón keresztül rákötni a hangkártyánkra.
Amennyiben a trainer porton akarunk csatlakozni ez alapján kössük be a jack dugaszt:
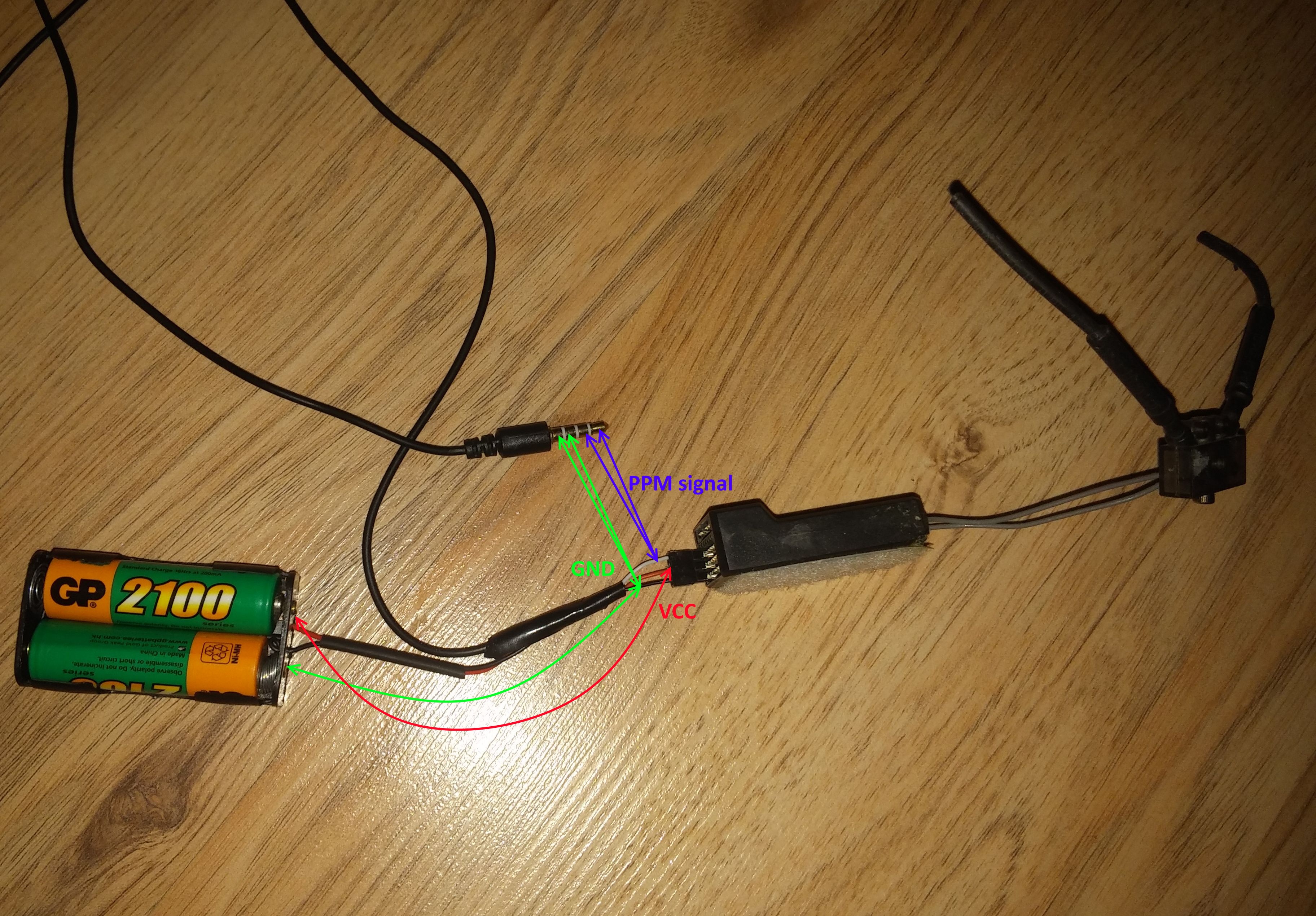
A PPM vevőnél három kábellel kell elbánnunk, ugyanis ott a föld és PPM jel mellett be kell kötni a vevő táplálását is. Ezt megtehetjük az USB porton keresztül is, de sok PC mikrofon és USB földelése le van választva egymástól, hogy ne kerüljön be zavar az USB-ről. Én nem bonyolítottam túl a dolgot és a FlySky ia6b vevőt két ceruzaakkuval etetem. Mivel én ilyen burzsuj vagyok, 4 eres jack kábelt használtam 2 eres helyett. :D Annyi a csavar, hogy a mikrofonnak fenntartott karikát is a földre kötöttem.
Egy dolgot még nem említettem, ez pedig a gamepad emuláló program. Ugyanis a legtöbb szimulátor magától nem tujda, mi a tököt kezdjen mikrofon bemeneten keresztül beszűrődő PPM jellel. Ő gamepadet vár, így be kell szerezni egy megfelelő emulátort. Én erre a célra a nyelvtörőnek is beillő SmartPropoPlus progit használom amit a következő bejegyzésben mutatok be.
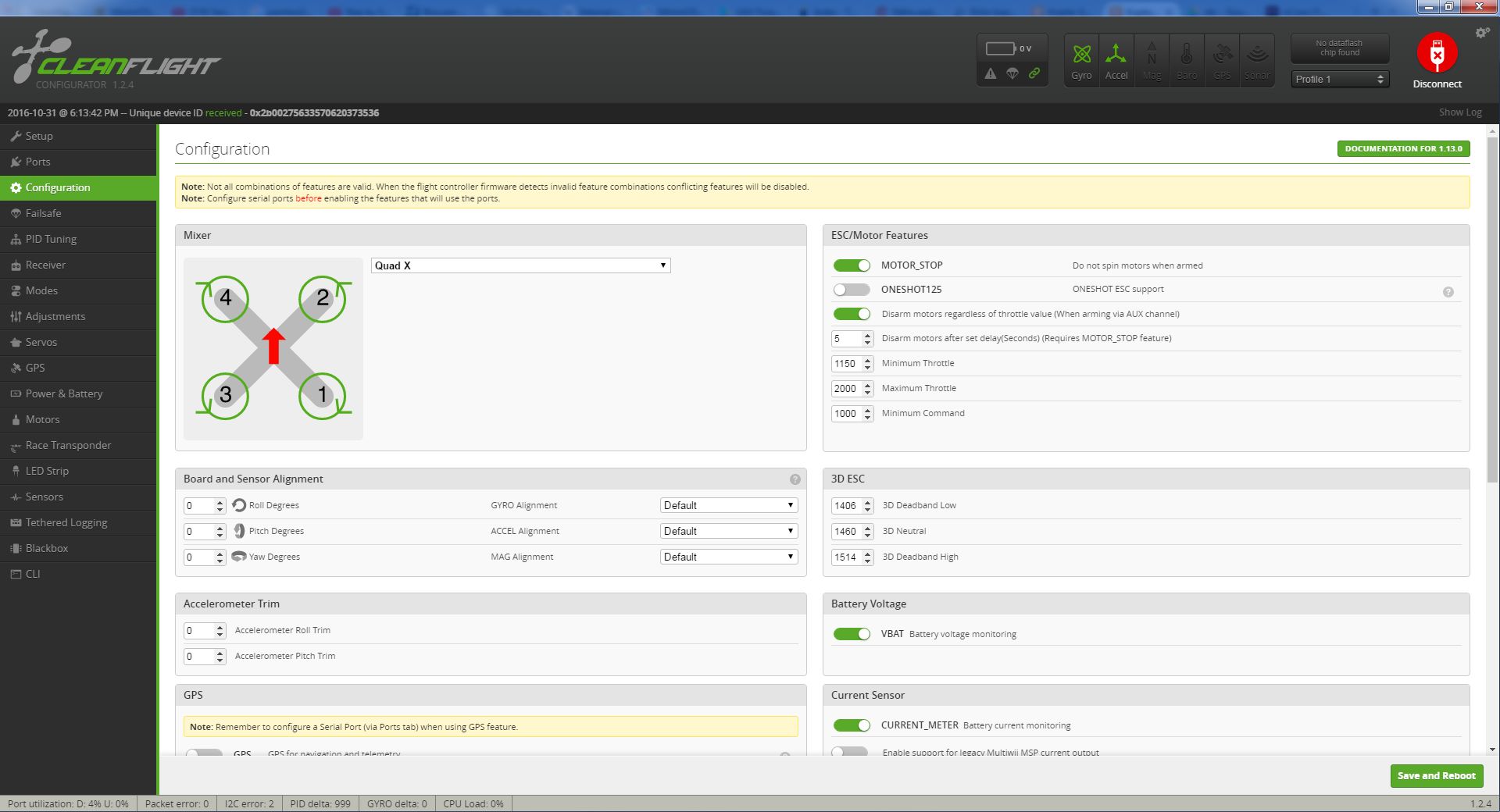
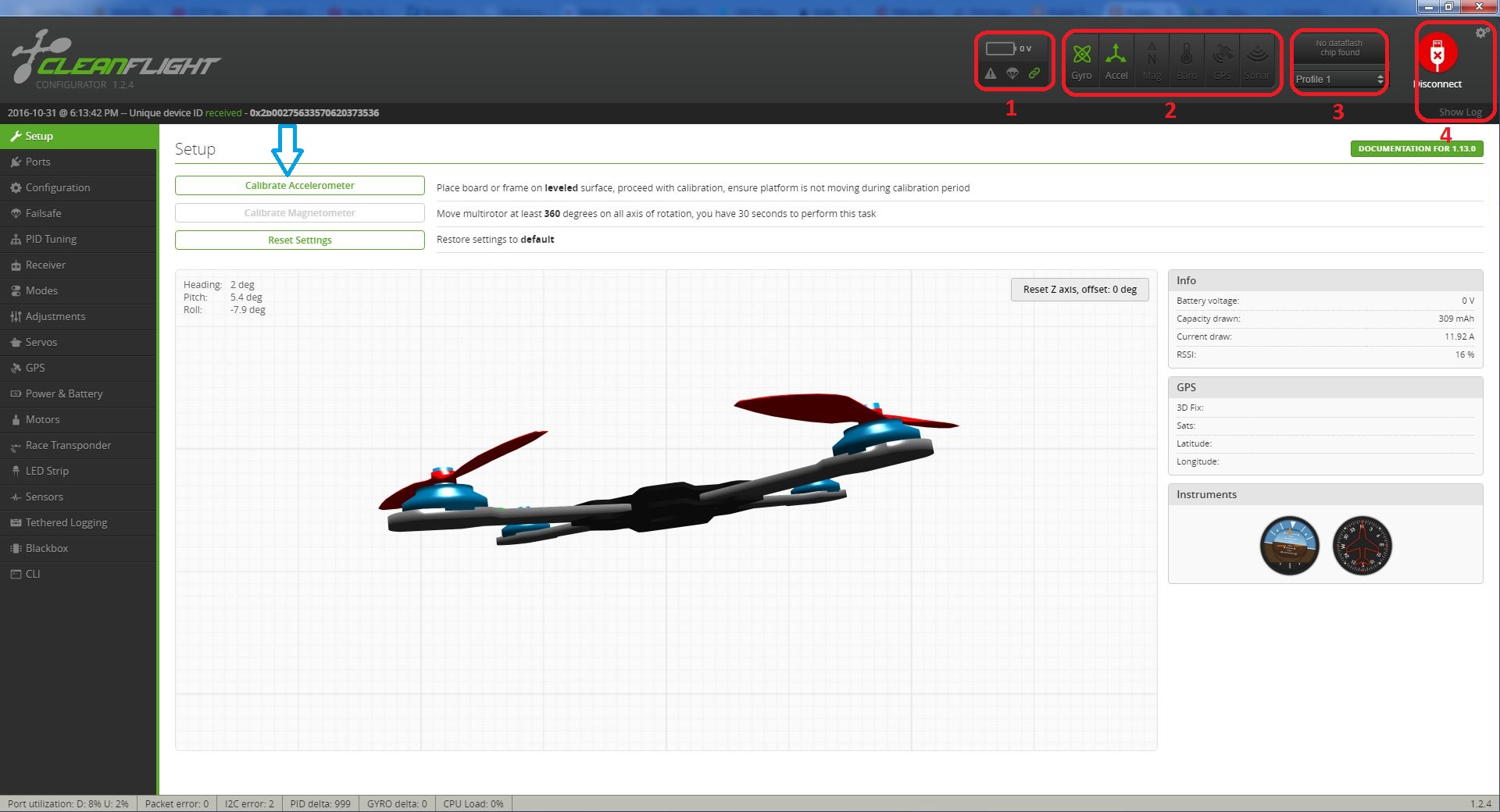
Hogy gépünk ne táncoljon el oldara stabilizált módokban, nem árt, ha kalibráljuk a gyorsulásmérőt. Miután kapcsolódtunk CF-en keresztül a gépünkhöz, helyezzük vízszintes felületre, arra vigyázva, hogy az USB kábel ne mozdítsa el, ne emelje meg, és bökjünk a kék nyíllal jelölt "Calibrate Accelerometer" gombra. Ez nélkül stabilizált módokban a gépünk valamelyik irányba úszhat. Ezt érdemes minden alkalommal megcsinálni, amikor az alaplapot elmozdítottuk a géptörzsben.
A QX80 nem tartalmaz magnetométert, így ennek kalibrációja nem szükséges. Aki kíváncsi rá, annak elárulom, hogy a "Calibrate Magnetometer"gombra kattintás után a kopterünket x,y,z tengelye körül körbe kell forgatni. Az USB kábel ezt tovább bonyolítja. Ezért vigyázzunk, hogy akkor végezzük, amikor nincs senki otthon, aki hülyének nézhetne. Ha mégis, fogjuk rá, hogy esőtáncot járunk.
Giroszkóp kalibrációja
Amennyiben repülés közben elkapnánk egy fát, érdemes újrakalibrálunk a giroszkópot. Ezt megtehetjük a repülésvezérlő újraindításával (akku le és fel) vagy a távon lévő pöckökkel a következő módon:
Helyezzük a gépünket egy vízszintes felületre, majd húzzuk a bal pöcköt a bal alsó sarokba a jobb pöcköt pedig le.
Hamár a mikrogépek többségébe integrálták a feszültségmérőt, nyugodtan használhatjuk a csipogóval kombinálva, hogy a gép jelezzen, ha lemerülőben az akku.
Ehhez a Configuration fülön a VBAT kapcsolót kell bezöldíteni.
Az utóbbi pár napban eléggé sok minden történt velem, egy ideig lesz miről blogolnom. Vettem egy csupaszárny röpcsit, kiégettem az Emax Nighthawk 280 pro-m alaplapját, az átépített X1-em felraktam egy fára, kipróbáltam az Eachine Gemini töltőt meg a KingKong mikrokamerát. A NightHawkot újraépítem, de ezúttal kap erősebb ESC-eket, GPS-t és SP F3-at, a CleanFlight helyett pedig iNAV-ot. A CF gyorstalpalóról sem feledkeztem el, folyamatosan adagolom az új részeket.
Ja, igen, fekete péntek.
Egy ideje már piszkálta a csőrömet a Liftoff. Mivel most 20 euró helyett 14-ért vágják az egyszeri kopterezőhöz, nem volt mit tenni, meg kellett vennem. Aki szintén így tenne, itt a Steam link. Ennek örömére rákötöttem az i6 távomat a PC-mre, de elfelejtettem elhozni az analóg kábelt, így egy PPM vevővel oldottam meg. Ami a legjobb, hogy mostmár drótnélküli a kapcsolat. Ebből kb. holnap, holnapután lesz bejegyzés.
Maga a játék egyelőre nagyon tetszik, így másfél óra után. Még nincs teljesen kész, de így is elég szórakoztató.
Ja, meg van csomagkapkodós játék mobilra, amivel 10%-ot lehet szerezni a kínai raktárból és 15%-ot az európaiból. Aki játszani akar, az scannelje be az alábbi QR kódot vagy kattintson ide mobilon, mert PC-n nem megy.
Egyelőre ennyit, mert hív a barátnőm. És mint tudjuk ez olyan mint a hasmenés vagy a halál. Ha menni kell, akkor menni kell.
Miután látttuk, hogy a vevő és repvezérlő már barátok, azaz, ha a távunkon mozgatunk egy pöcköt, a neki megfelelő csatorna motoszkál a Cleanflight-ban, érdemes megmondani a repvezérlőnek, mit is csináljon, ha változást lát egy AUX csatornán.
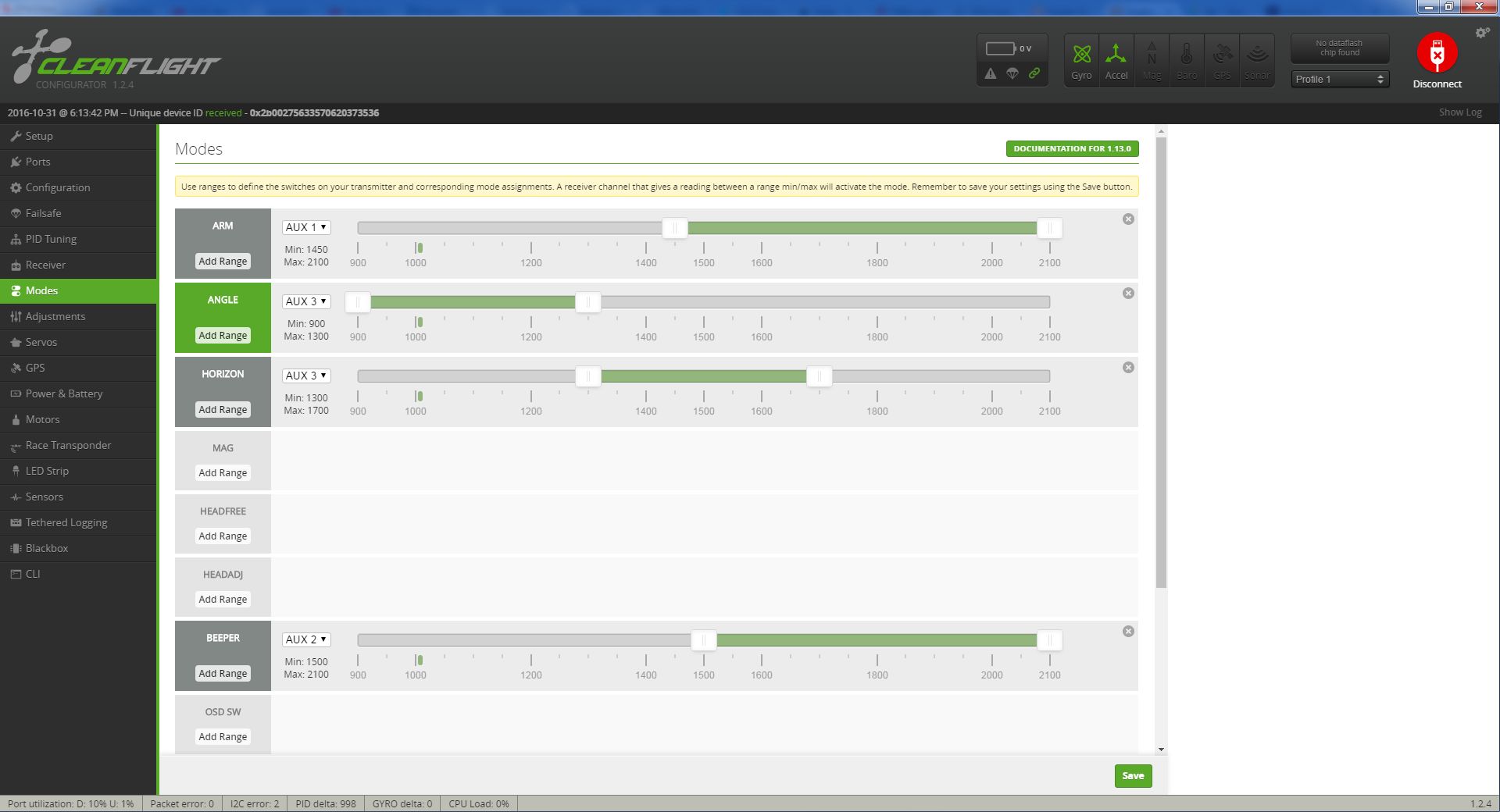
Tehát kapcsolódjunk CF-el a gépünkhöz, majd kattintsunk a "modes" fülre. Az alábbi látvány fogad:
A bal oldalon láthatóak a beállítható módok. Mellettük választhatjuk ki azt az AUX csatornát, amivel az adott módot vezérelhetjük. Jobb oldalt pedig azt állíthatjuk be, hogy az adott mód mikor legyen aktív.
Elég a dumából, próbáljuk ki a gyakorlatban is, állítsuk be a csipogó csipogtatását az második AUX csatornára!
Először is kapcsoljuk be a távunkat. Keressük ki azt a sort, ahol a BEEPER található. (Vakok és gyengén látók kedvéért a hetedik sor. :P) Mellete válasszuk ki az "AUX 2"-őt. Nyomjunk egy save-et. Most, ha megnyomkdojuk a távunk AUX 2 csatornájához rendelt kapcsolót, akkor a jobboldali sáv alatt lévő pöcöknek is mozognia kéne. A csipogó akkor csipog, amikor a pöcök a zöld sáv alatt van, így ezt a csúszkákkal a megfelelő helyre húzhatjuk.
Nyomjunk egy save-et, ha csipogó csipog, akkor készen vagyunk ezzel a móddal. Ha nem csipogna, akkor lehet, hogy fordítva van bekötve, fordítsuk meg.
Aki nem nagyon akar variálni, az használhatja az én beállításaimat a FlySky i6-hoz tíz csatornára okosítva. Persze ebből csak 8 csatornát lehet használni PPM-ben.
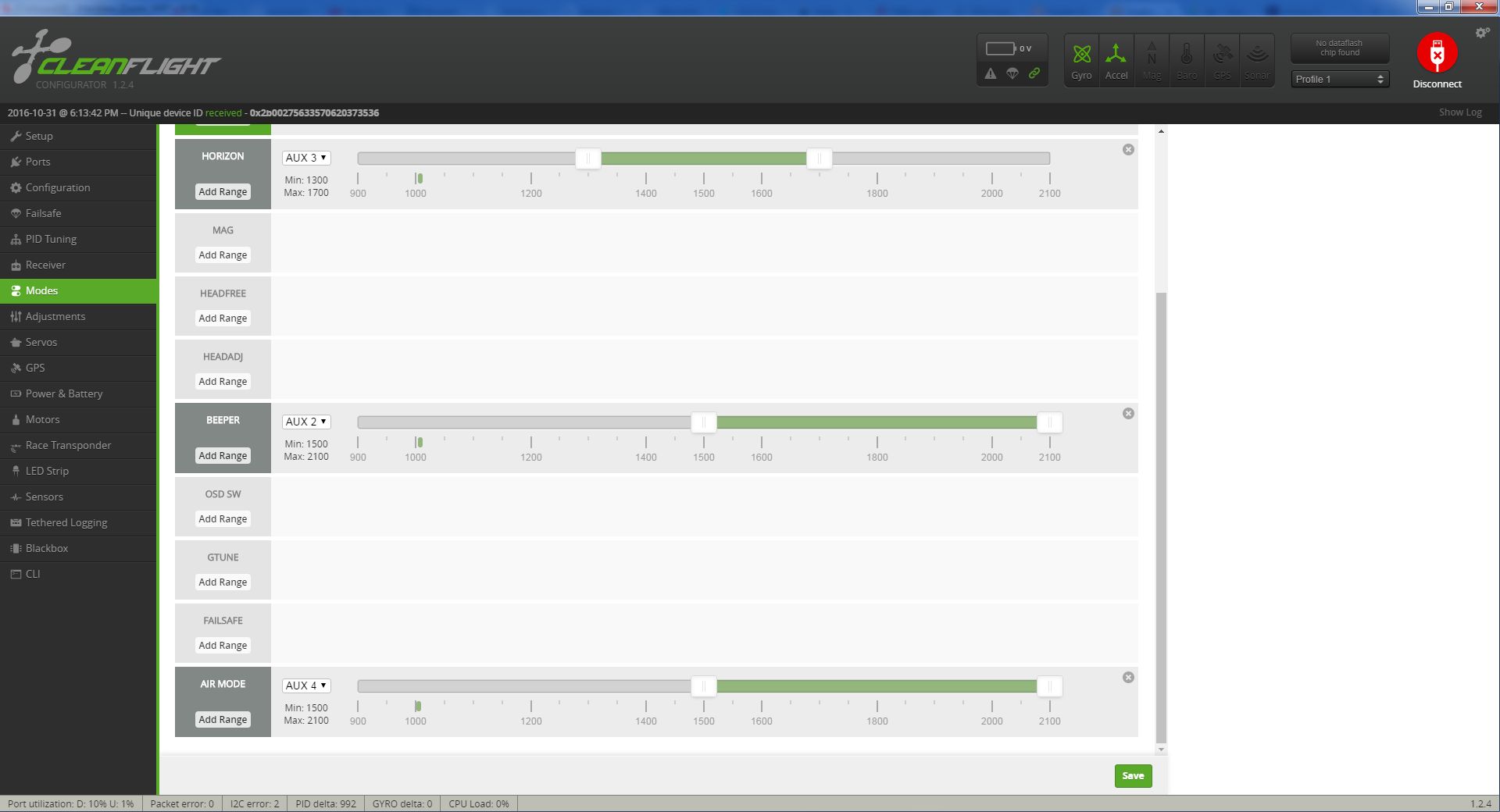
Fontosabb módok
ARM - a motorok kibiztosítása. Alapesetben úgy biztosítjuk ki a motorokat, hogy a táv bal pöckét jobbra+le húzzuk, és úgy biztosítjuk be őket, hogy balra+le húzzuk ugyanazt a pöcköt. Ez azért fontos, mert a motorok nem indulnak el, míg ki nem biztosítjuk őket. Ez kis gépnél túlzásnak tűnhet, de egy 10-20 kilós masinánál már vérre menő sérülést okozhatunk magunknak és környezetünknek.
ANGLE - ebben a módban kopterünk úgy viselkedik mint egy játékgép. Irányváltáskor egy maximális szögnél nem engedi jobban bedőlni a gépet, a pöcök elengedésénél meg automatikusan vízszintes helyzetbe vágja magát.
HORIZON - az ANGLE tökösebb verziója. Irányváltáskor nincs korlátozva, hogy a gép milyen szögben dőlhessen be, a pöcök elengedésénél ugyanúgy automatikusan vízszintes helyzetbe vágja magát. Ebben a módban végre szabadon csinálhatunk bukfenceket vagy derégszögben állíthatjuk gépünket a földbe. Lényegében felfogható az Angle és Acro módok keverékének.
ACRO - profiknak való mód, amiben nincs korlátozva a maximális dőlésszög, és a gép sem hozza magát automatikusan vízszintes helyzetbe, ha elengedjük a táv pöckét. Ebben a módban csak a giroszkóp aktív, a gyorsulásmérő nem. Érdekes módon, nincs feltüntetve a módok közt, beállítása kicsit csalóka. Akkor aktiválódik, ha az ANGLE és a HORIZON nincs aktiválva. Nálam az ANGLE 1000-1300 a HORIZON pedig 1300-1600 közt aktív. Ha a háromállású kapcsolót teljesen lekapcsolom, akkor ezen a csatorna kb. 2000 körüli értéket vesz fel és így aktiválódik az ACRO.
MAG / HEADFREE / HEADADJ - gyengéknek való módok, használatuk férfiaknál csökkenti a pénisz méretét.
BEEPER - csipogó. Vigyázat, a Naze32 és hasonszőrű társai csak aktív buzzert kezel.
AIRMODE - alacsony gázállásnál növeli a gép manőverezhetőségét. Nagyon jó dolog, pláne freestyle reptetésnél. Használatánál érdemes kitenni a gép élesítését egy külön kapcsolóra, nehogy lelőjük a motorokat alacsony gázállásnál. Ezen kívül leszállás előtt kapcsoljuk ki, mert úgy fog pattogni a gép, mint egy pingpong labda.
Miután felraktuk a vevőt és a csipogót a gépre, ideje lenne a vevőt összepároztatni a rádióadónkkal, mert amint feldugjuk az akkut, vétel hiányában a repvezérlő bepánikol és a csipogó kiszedi a fülünkből a fülzsírt.
A vevő és adó egymásra találása (binding) azt a célt szolgálja, hogy a vevő csak a mi adónk utasításait kövesse. A binding menete gyártónként és azon belül generációnként és típusonként is eltérő. Szerencsére a FlySky mikrovevők bindelése egy kaptafa, csak némi eltérés van abban, hogy a régi AFHDS vagy az újabb AFHDS 2A protokollt használ a vevő.
Amennyiben még nem tettük meg, az akku felhelyezése előtt, most itt az ideje leszedni a propellereket.
AFHDS mikrovevők bindelése PPM esetén
Az újabb FlySky adók (FS-i6, FS-i6X, TGY-i6, FS-i6S, Turnigy Evolution) alapjáraton az AFHDS 2A protokollt használják, amit a táv menüjében állíthatunk át. FS-i6 esetében lépjünk be a főmenübe az OK gomb hosszú lenyomásával, állítsuk be a PPM-et aktívra, majd mentsük el a Cancel hosszan nyomásával. Tudom, kreténség, de ez van. Ugyanilyen módon válasszuk ki az AFHDS 2A menüpontot és kapcsoljuk ki.
Kapcsoljuk ki a távunkat. Nyomjuk meg és tartsuk lenyomva a bind gombot és kapcsoljuk be a távunkat. Amennyiben a vevőnk tartalmaz bind pöcköt, kössük a földre. Ha ilyen nincs, mint az én esetemben, akkor a kopterunk automatikusan kapcsolódik - autobind. Kapcsoljuk be a kopterunk. A buzzer csipogásának egy idő után abba kéne maradnia. Kapcsoljuk ki a távunk majd a kopterunk.
Amikor újra bekapcsoljuk a távot (ezúttal a bind gomb nélkül) és a koptert (a bind pin lekötésével, amennyiben van), ez utóbbi már csak az inicializációs szekvencia alatt csipog, utána kussban marad.
serial esetén - ellenőrizzük a táv menüjében, hogy az AFHDS 2A protokoll aktív-e, majd kapcsoljuk ki a távunkat. Nyomjuk meg és tartsuk lenyomva a bind gombot és kapcsoljuk be a távunkat. Ezután kapcsoljuk be a kopterunk miközben a vevőn lenyomva tartjuk a bind gombot. A buzzer csipogásának egy idő után abba kéne maradnia. Kapcsoljuk ki a távunk majd a kopterunk.
Amikor újra bekapcsoljuk a távot (ezúttal a bind gomb nélkül) és a koptert (a bind pin lekötésével, amennyiben van), ez utóbbi már csak az inicializációs szekvencia alatt csipog, utána kussban marad. A táv képernyőjén a vevőtől függően különböző telemetria-adatokat láthatunk, úgymint a vevő tápfeszültsége, a vétel minősége, stb.
PPM esetén - ellenőrizzük a táv menüjében, hogy az AFHDS 2A protokoll aktív-e, állítsuk be a PPM-et aktívra, majd kapcsoljuk ki a távunkat. Nyomjuk meg és tartsuk lenyomva a bind gombot és kapcsoljuk be a távunkat. Ezután kapcsoljuk be a kopterunk miközben a vevőn lenyomva tartjuk a bind gombot. A buzzer csipogásának egy idő után abba kéne maradnia. Kapcsoljuk ki a távunk majd a kopterünk.
Amikor újra bekapcsoljuk a távot (ezúttal a bind gomb nélkül) és a koptert (a bind pin lekötésével, amennyiben van), ez utóbbi már csak az inicializációs szekvencia alatt csipog, utána kussban marad. A táv képernyőjén a vevőtől függően különböző telemetria-adatokat láthatunk, úgymint a vevő tápfeszültsége, a vétel minősége, stb.
A csatornakiosztás ellenőrzése
Kapcsoljuk be a távunkat majd csatlakozzunk CleanFlight alatt a kopterunkhoz. Naze32-nél és régebbi Sp F3 lapoknál csatlakoztatni kell madár akkuját is, a Tiny QX80 már USB-ről is meg tudja hajtani a csipogót és a vevőt.
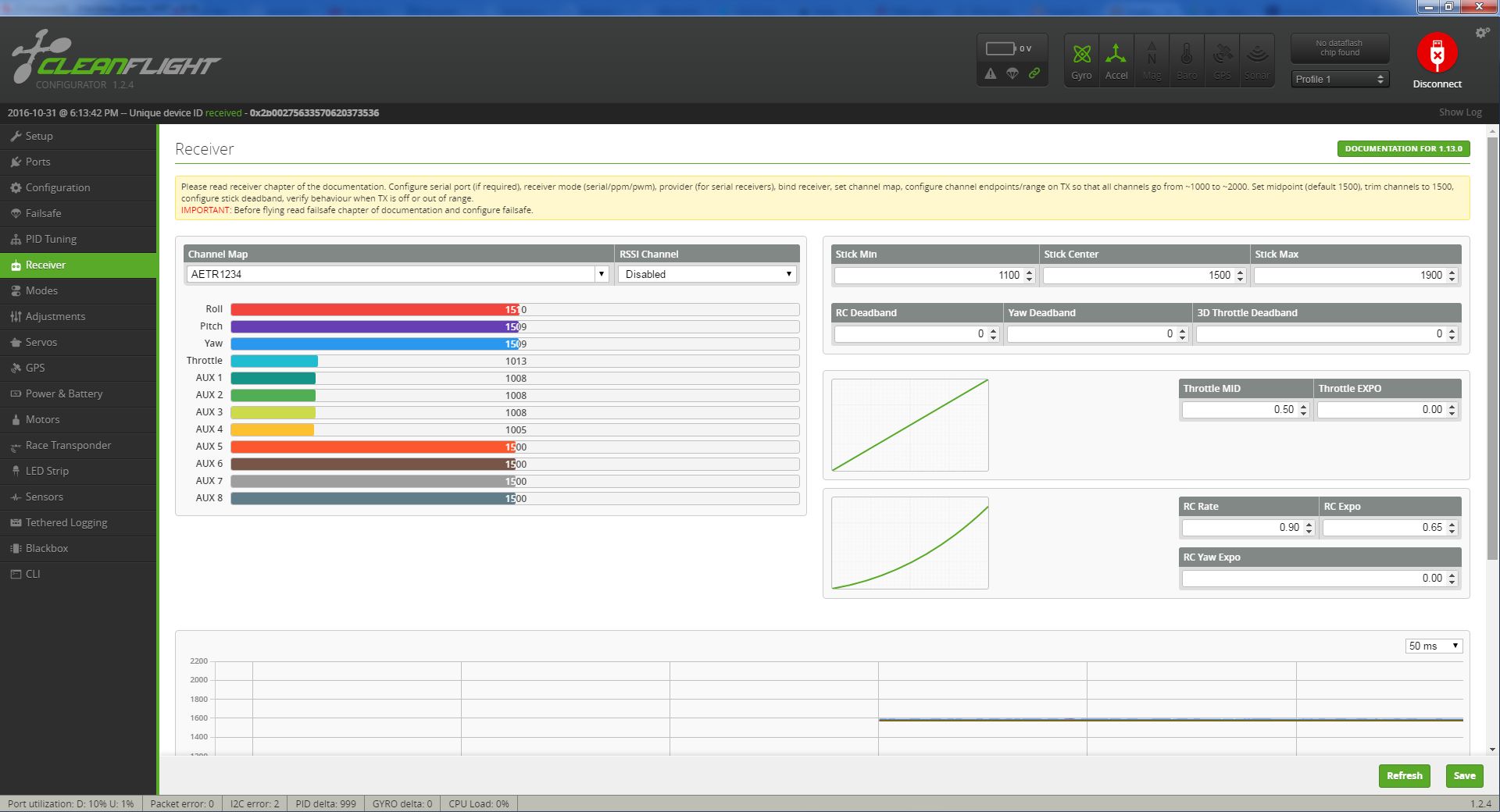
Kattintsunk a Receiver fülre.
A roll, pitch, yaw értékeknek kb. 1500-on kéne állniuk, a Throttle és használható AUX csatornának meg 1000-en. Mivel én PPM vevőt használok, így a kopter mozgatásához használt 4 catornán kívül még 4 AUX csatornát tudok használni. Enyhe ugrálás a csatornákon természetes, nem kell aggódni.
Ellenőrizzük, hogy az adó pöckeit mozgatva megfelelő csatornák reagálnak-e. Mode2 adó esetén ha meghúzzuk a bal pöcköt balra, akkor a yawnak 1000-en kéne állnia, jobbra húzva meg 2000-en. A bal pöcköt lehúzva a throttle csatornának 1000-en kéne állnia, felnyomva pedig 2000-en.
Ha meghúzzuk a jobb pöcköt balra, akkor a rollnak 1000-en kéne állnia, jobbra húzva meg 2000-en. A jobb pöcköt lehúzva a pitch csatornának kéne 1000-en állnia, felnyomva pedig 2000-en.
A csatornák próbálgatásakor, mielőtt csatlakoztatnánk az akkut, mindenképpen szedjük le a propellereket. Nem tudhatjuk ugyanis, hogy melyik csatorna élesíti a motorokat. Kis gépeknél ez nem akkora veszély, maximum elrepül a gépünk, de nagy gépeknél komoly sérülést okozhat.Alapesetben a bal pöcköt a jobb alsó sarokba húzva élesítjük a motorokat, disarmolni pedig a bal pöcköt a bal alsó sarokba kitartva lehet. Azonban lehetséges, hogy az élesítés egy külön csatornára van állítva. Amennyiben ez és a gáz el van keveredve, netán a gáz pont fordítva reagál, a felismerés eléggé húsba vágó lehet.
Próbálgassuk végig az AUX kapcsolóinkat is. Amennyiben egy csatorna közepe nem 1500-on lenne, ezt a távon a csatornához tartozó trim gombbal orvosolhatjuk. Amennyiben a kezdőpont nem 1000 vagy a végpont nem 2000 lenne, ezt a táv endpoints menüpontjában tudjuk kezelni.
Amennyiben az egyik pöcök vagy kapcsoló mozgatására nem a megfelelő csatorna reagál, ezt a Channel map alatti AETR1234 variálásával javíthatjuk ki.


 További távparancsért parancsoljatok a
További távparancsért parancsoljatok a