Falisafe, failsafe te mindenem, tudom, hogy kopterem neked köszönhetem!
Mi a tök az a failsafe? A szó szerinti fordítás valami olyasmit jelent, hogy üzembiztonság. A "drónoknál" én ezt a "mit csináljunk jelvesztés esetén"-re fordítanám. Az egyik leghasznosabb funkció.
Failsafe nélkül, ha jelvesztés van, a rádióvevő ismétli az utolsó parancsot, a repvezérlő meg vakon követi, amíg le nem merül az akku. Ha ez a parancs a nyélgáz és / vagy az egyenesen előre volt, akkor adhatjuk is fel az újabb rendelést Banggood-on.
A failsafe két helyen lakik:
1. a vevőben (RX) - elég fapados beállításokat tesz lehetővé, lényegében beállíthatunk egy csatornára egy értéket jelvesztés esetére
2. a repülésvezérlőben (FCB) - Cleanflight / Betaflight kicsit kifinomultabb, de a fentin kívül kimerül a "most zuhanj le" vagy "süllyedj kis gázon" lehetőségekben. Aki olyan úri huncutságokra vágyik, hogy jelvesztés esetén térjen haza a gép (RTH) az használja az iNAV-ot.
Failsafe beállítása a rádióvevőn
Mint már sejthető, a vevő gyártójától és típusától függően kell beállítani a failsafe-et. Bizonyos vevők nem tartalmaznak failsafe lehetőséget, ettől meneküljünk. Az általam használt Dasmikro flysky vevő gyárilag lekapja a gáz csatornáját jelvesztés esetén, így nem kell semmit állítanunk. A kicsit kifinomultabb vevőknél, mint az FS-A8S a failsafe-et a rádióadón lehet beállítani.
Failsafe beállítása a rádióadón
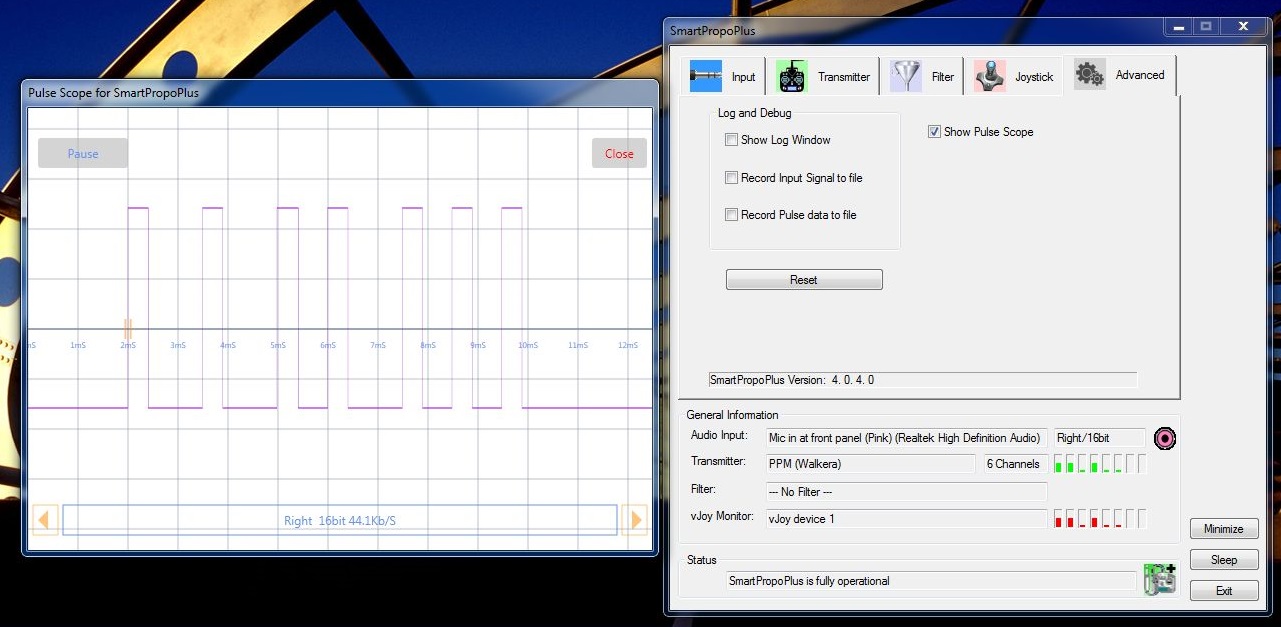
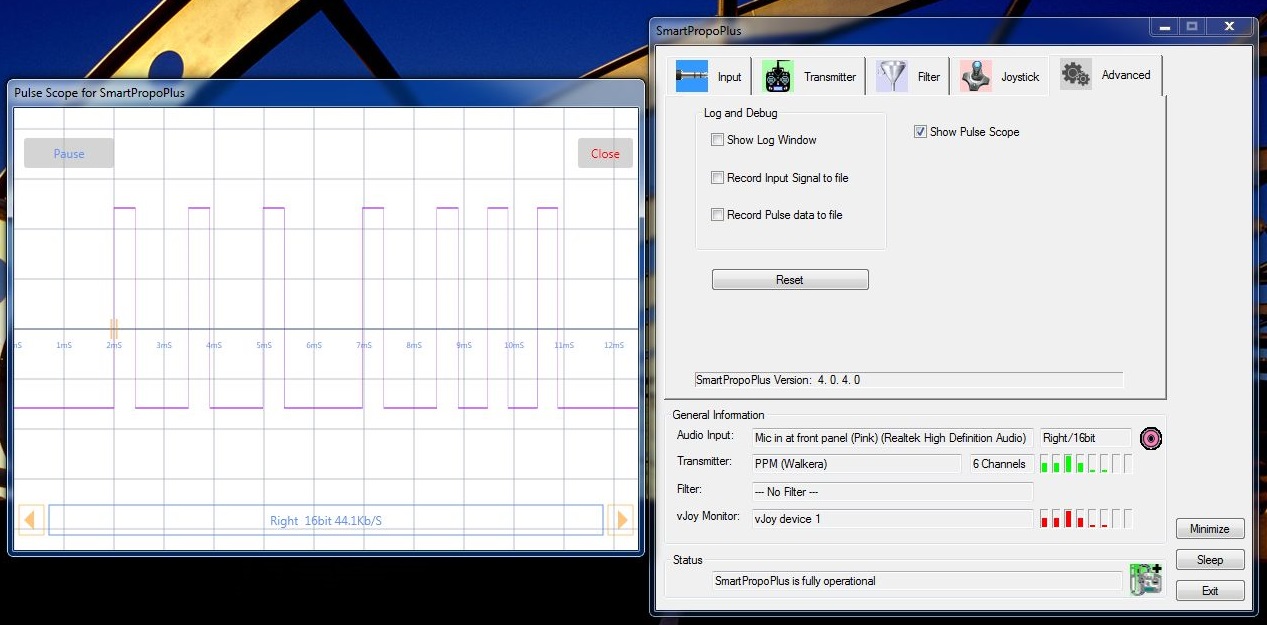
FlySky távnál, miután kapcsolódott a vevőhöz, menjünk a failsafe menübe, majd válasszuk ki, mely csatorna értékét szeretnénk beállítani jelvesztés esetén. Kvadkopter esetén a gázt érdemes egy olyan értékre állítani, aminél nem esik le a kopterünk, hanem szépen landol. A gázcsatorna Mode2-nél általában a CH3. Nyugtázzuk a Cancel gomb hosszan nyomásával. A többi csatornát ildomos békén hagyni.
Failsafe beállítása repülésvezérlőn
Erre meg miért van szükség? Hát azért, mert a rádióadó eléggé butácska, nem lehet neki megadni, hogy szálljon le és kapcsolja ki a motorokat. Amennyiben iNAV-bol végre importálják az RTL funkciót, elérhetővé válik jelvesztés esetén a hazatérés funkció is, ha van GPS-ünk.
Tehát kapcsolódjunk CF-en a gépünkhöz és kattintsunk a Failsafe fülre.
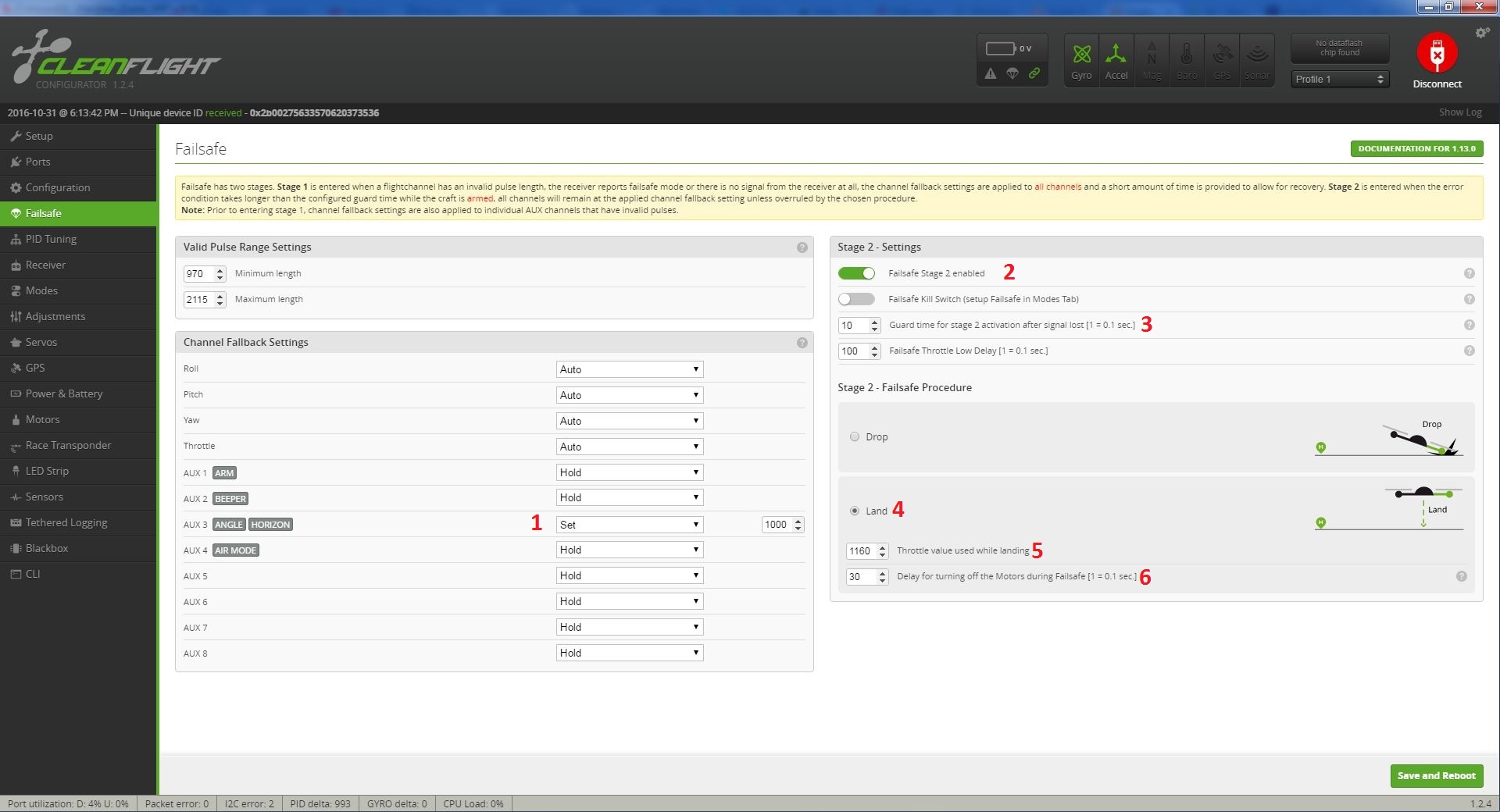
CF-ben a failsafe akkor aktiválódik, hogyha egy csatorna nem érvényes értéket vesz fel. A value pulse range settings alatt tudjuk beállítani, hogy mit tekintsen az FCB érvénytelennek. Esetemben, ha egy csatorna, pl. a gáz a normális 1000-2000 érték helyett lemegy 970-alá vagy 2115 fölé, életbe lép a failafe elséo fázisa.
Az első fázisban megadhatjuk, hogy melyik csatorna milyen értéket vegyen fel. Az irány és gázcsatornákat hagyhatjuk "auto" állapotban vagy a gáznak beállíthatunk egy akkora értéket, amivel a gép kellemesen elkezd sülyedni. A repmódokat választó kapcsolónál (nálam AUX3) érdemes megadni, hogy a gép vágja magát ANGLE módba. (1)
A második fázist a 2-vel jelölt kapcsolóval aktiválhatjuk és a 3-as pont melletti mező határozza meg tizedmásodpercekben hogy mikor lép életbe. Nálam ez 10, így egy mp után aktiválódik a második fázis.
A 4. pontban azt adtam meg, hogy landoljon, ne leessen a gép. Az 5. adja meg a gázállást. Ide érdemes egy olyan értéket megadni, amivel a gép szép egyenletesen landol, nem leesik, de semmikép sem emelkedik.
A 6. pont adja meg, hogy hány tizedmásodperc után kapcsolja le a kopter a motorjait. Nálam ez három másodperc. Erre azért van szükség, hogy nehogy leégjenek az ESC-ek, ha elakadnának a propellerek földet éréskor.
Amikor készen vagyunk, mentsük el a beállításainkat.
Próba
Elöször is szedjük le a propellereket. Ezután kapcsoljuk be a távunkat, csatlakoztassuk a gépünk a CF-hoz, dugjuk be az akkut és várjuk meg, míg a kopter eldudálja az inicilzáló szekvenciát.Most vigyázó szemetek Párizsra a pirossal jelölt téglalapra vessétek.
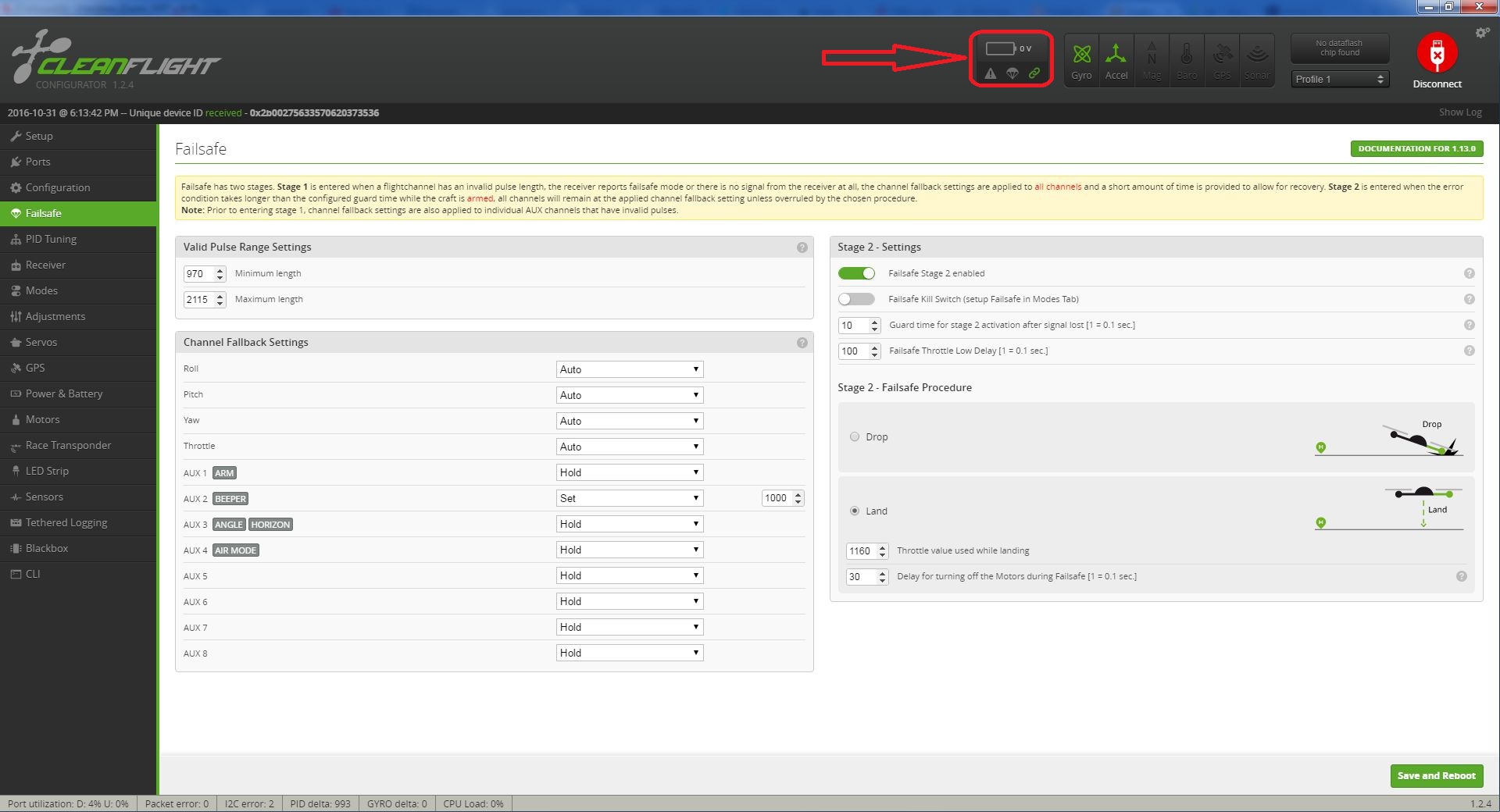
Armoljuk a gépünket - a szürke háromszög sárgára vált. Kapcsoljuk ki a távunkat. A szürke ejtőernyő pirosra vált, azaz aktiválódik a fialsafe. Amennyiben a motorok a nekünk tetsző sebességgel pörögnek és lekapcsolnak a beállított idő után (nálam 3 másodperc) lényegében készen vagyunk.
Nagyobb gépnél érdemes finomhangolni a failsafe által használt gázállást, nehogy elrepüljön vagy földbe csapódjon a masina, de egy mikrokopternél ez nem annyira élet vagy halál dolga.
Vissza a főmenübe.