3. Bindelés és a csatornakiosztás ellenőrzése
CleanFlight gyorstalpaló almenü
Miután felraktuk a vevőt és a csipogót a gépre, ideje lenne a vevőt összepároztatni a rádióadónkkal, mert amint feldugjuk az akkut, vétel hiányában a repvezérlő bepánikol és a csipogó kiszedi a fülünkből a fülzsírt.
A vevő és adó egymásra találása (binding) azt a célt szolgálja, hogy a vevő csak a mi adónk utasításait kövesse. A binding menete gyártónként és azon belül generációnként és típusonként is eltérő. Szerencsére a FlySky mikrovevők bindelése egy kaptafa, csak némi eltérés van abban, hogy a régi AFHDS vagy az újabb AFHDS 2A protokollt használ a vevő.
Amennyiben még nem tettük meg, az akku felhelyezése előtt, most itt az ideje leszedni a propellereket.
AFHDS mikrovevők bindelése PPM esetén
Az újabb FlySky adók (FS-i6, FS-i6X, TGY-i6, FS-i6S, Turnigy Evolution) alapjáraton az AFHDS 2A protokollt használják, amit a táv menüjében állíthatunk át. FS-i6 esetében lépjünk be a főmenübe az OK gomb hosszú lenyomásával, állítsuk be a PPM-et aktívra, majd mentsük el a Cancel hosszan nyomásával. Tudom, kreténség, de ez van. Ugyanilyen módon válasszuk ki az AFHDS 2A menüpontot és kapcsoljuk ki.
Kapcsoljuk ki a távunkat. Nyomjuk meg és tartsuk lenyomva a bind gombot és kapcsoljuk be a távunkat. Amennyiben a vevőnk tartalmaz bind pöcköt, kössük a földre. Ha ilyen nincs, mint az én esetemben, akkor a kopterunk automatikusan kapcsolódik - autobind. Kapcsoljuk be a kopterunk. A buzzer csipogásának egy idő után abba kéne maradnia. Kapcsoljuk ki a távunk majd a kopterunk.
Amikor újra bekapcsoljuk a távot (ezúttal a bind gomb nélkül) és a koptert (a bind pin lekötésével, amennyiben van), ez utóbbi már csak az inicializációs szekvencia alatt csipog, utána kussban marad.
Az előbbi módszer FlySky i6-al és az általam használt DasMikro 8 csatornás autobind PPM vevővel szemléltetve.
AFHDS 2A mikrovevők bindelése
serial esetén - ellenőrizzük a táv menüjében, hogy az AFHDS 2A protokoll aktív-e, majd kapcsoljuk ki a távunkat. Nyomjuk meg és tartsuk lenyomva a bind gombot és kapcsoljuk be a távunkat. Ezután kapcsoljuk be a kopterunk miközben a vevőn lenyomva tartjuk a bind gombot. A buzzer csipogásának egy idő után abba kéne maradnia. Kapcsoljuk ki a távunk majd a kopterunk.
Amikor újra bekapcsoljuk a távot (ezúttal a bind gomb nélkül) és a koptert (a bind pin lekötésével, amennyiben van), ez utóbbi már csak az inicializációs szekvencia alatt csipog, utána kussban marad. A táv képernyőjén a vevőtől függően különböző telemetria-adatokat láthatunk, úgymint a vevő tápfeszültsége, a vétel minősége, stb.
PPM esetén - ellenőrizzük a táv menüjében, hogy az AFHDS 2A protokoll aktív-e, állítsuk be a PPM-et aktívra, majd kapcsoljuk ki a távunkat. Nyomjuk meg és tartsuk lenyomva a bind gombot és kapcsoljuk be a távunkat. Ezután kapcsoljuk be a kopterunk miközben a vevőn lenyomva tartjuk a bind gombot. A buzzer csipogásának egy idő után abba kéne maradnia. Kapcsoljuk ki a távunk majd a kopterünk.
Amikor újra bekapcsoljuk a távot (ezúttal a bind gomb nélkül) és a koptert (a bind pin lekötésével, amennyiben van), ez utóbbi már csak az inicializációs szekvencia alatt csipog, utána kussban marad. A táv képernyőjén a vevőtől függően különböző telemetria-adatokat láthatunk, úgymint a vevő tápfeszültsége, a vétel minősége, stb.
A csatornakiosztás ellenőrzése
Kapcsoljuk be a távunkat majd csatlakozzunk CleanFlight alatt a kopterunkhoz. Naze32-nél és régebbi Sp F3 lapoknál csatlakoztatni kell madár akkuját is, a Tiny QX80 már USB-ről is meg tudja hajtani a csipogót és a vevőt.
Kattintsunk a Receiver fülre.
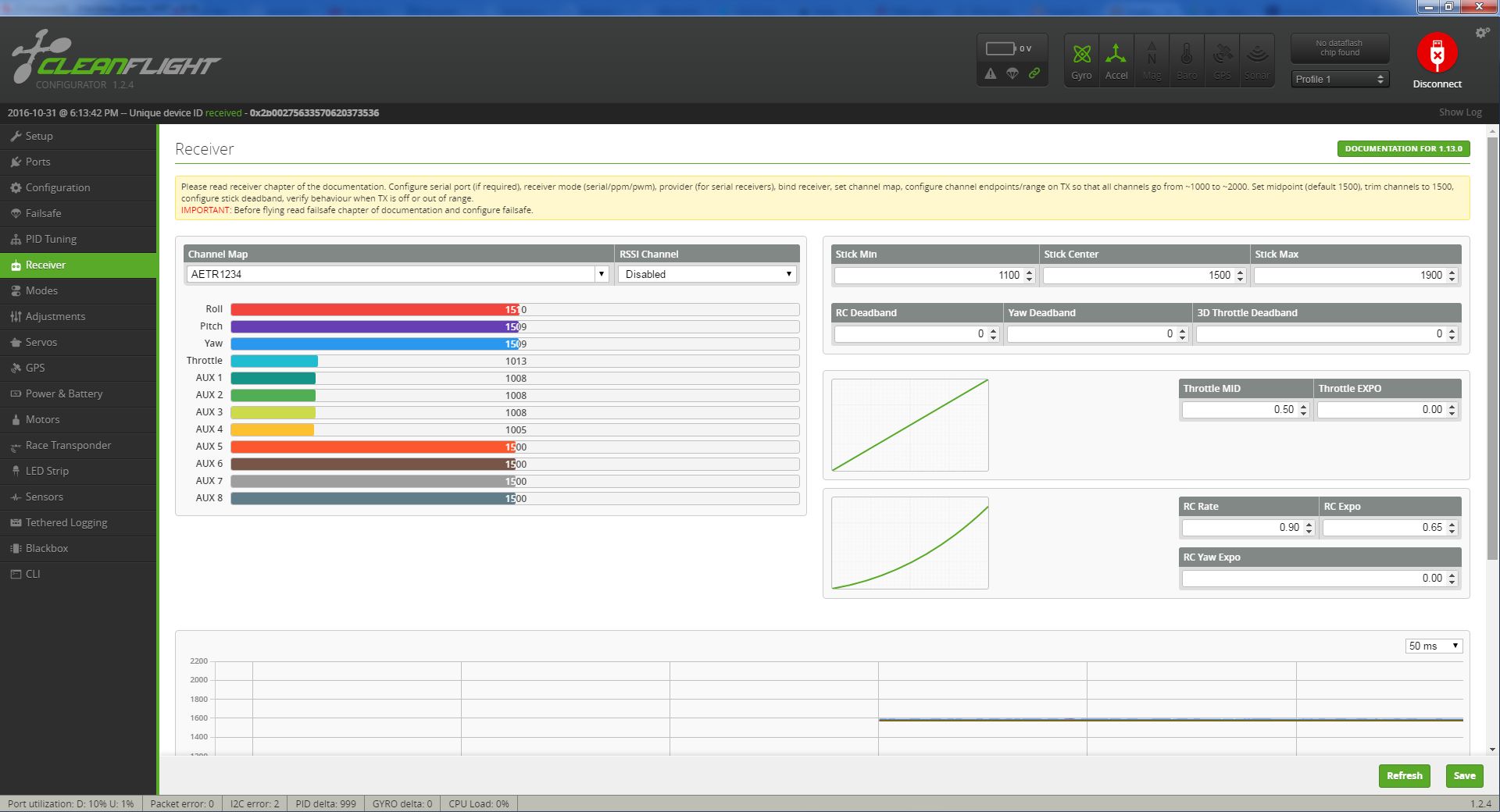
A roll, pitch, yaw értékeknek kb. 1500-on kéne állniuk, a Throttle és használható AUX csatornának meg 1000-en. Mivel én PPM vevőt használok, így a kopter mozgatásához használt 4 catornán kívül még 4 AUX csatornát tudok használni. Enyhe ugrálás a csatornákon természetes, nem kell aggódni.
Ellenőrizzük, hogy az adó pöckeit mozgatva megfelelő csatornák reagálnak-e. Mode2 adó esetén ha meghúzzuk a bal pöcköt balra, akkor a yawnak 1000-en kéne állnia, jobbra húzva meg 2000-en. A bal pöcköt lehúzva a throttle csatornának 1000-en kéne állnia, felnyomva pedig 2000-en.
Ha meghúzzuk a jobb pöcköt balra, akkor a rollnak 1000-en kéne állnia, jobbra húzva meg 2000-en. A jobb pöcköt lehúzva a pitch csatornának kéne 1000-en állnia, felnyomva pedig 2000-en.
A csatornák próbálgatásakor, mielőtt csatlakoztatnánk az akkut, mindenképpen szedjük le a propellereket. Nem tudhatjuk ugyanis, hogy melyik csatorna élesíti a motorokat. Kis gépeknél ez nem akkora veszély, maximum elrepül a gépünk, de nagy gépeknél komoly sérülést okozhat. Alapesetben a bal pöcköt a jobb alsó sarokba húzva élesítjük a motorokat, disarmolni pedig a bal pöcköt a bal alsó sarokba kitartva lehet. Azonban lehetséges, hogy az élesítés egy külön csatornára van állítva. Amennyiben ez és a gáz el van keveredve, netán a gáz pont fordítva reagál, a felismerés eléggé húsba vágó lehet.
Próbálgassuk végig az AUX kapcsolóinkat is. Amennyiben egy csatorna közepe nem 1500-on lenne, ezt a távon a csatornához tartozó trim gombbal orvosolhatjuk. Amennyiben a kezdőpont nem 1000 vagy a végpont nem 2000 lenne, ezt a táv endpoints menüpontjában tudjuk kezelni.
Amennyiben az egyik pöcök vagy kapcsoló mozgatására nem a megfelelő csatorna reagál, ezt a Channel map alatti AETR1234 variálásával javíthatjuk ki.
Vissza a főmenübe.