JJRC X1 agyműtét - 4. rész
Reszkessetek káposzták a PID-emtől!

Az X1 átalakításában legutóbb oda jutottam, hogy sikeresen összeállt a hardver, a szoftverben pedig megléptem a szükséges beállításokat, maradt a gép PID értékeinek gatyába rázása, hogy végre úgy szálljon mint egy redbullal megitatott sólyom, és ne úgy dülöngéljen mint a Vuk részeges libái.
A nagyokosok azt írják, hogy a PID-et "Acro" módban érdemes kovácsolni, stabilizált módokban semmi értelme. No, én "Angle" módban álltam neki, mondván nekem csak holmi fejlesztők meg versenyzők ne okoskodjanak. Miután minden egyes beállítással a gép stabilitása rosszabb lett, beláttam, hogy bizony acroban kell helyrerakni a PID-et.
PID controllerből a "betaflight"-ot használom. Ebben a módban az a nagy truváj, hogy lebegőpontos aritmetikát használ, ami sokkal pontosabb lehet a fixpontos “legacy” PID controllernél. Az F3-ban meg az a nagy truváj, hogy rendelkezik lebegőpontos számolóegységgel, elődjével, az F1-el szemben, ami a Naze32-ben is dobog.
A Betaflight 3.0-ban a "betaflight" pid controller lényegében a CleanFlight-ból ismert "Luxfloat", amit Boris B helyrepofozott, de amit még azelőtt "Baseflight"-nak hívtak, holott sohasem volt része a Baseflightnak. Zavaros? Inkább hagyjuk. :)
A Baseflight 3.0 második számú PID controllere a már említett "legacy" névre hallgat. Ez leánykori nevén “MultiWii Rewrite” vagy csak szimplán "Rewrite."
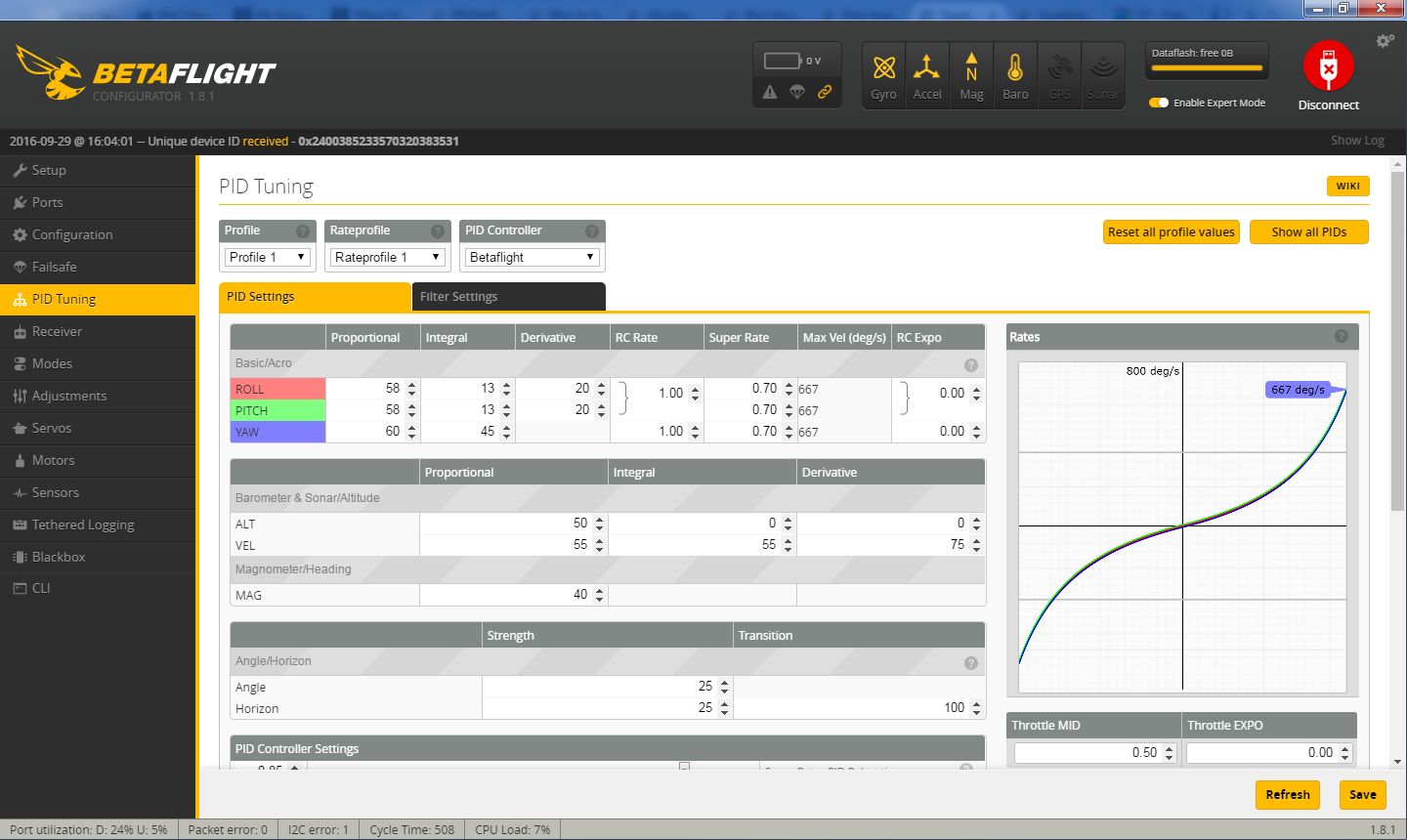
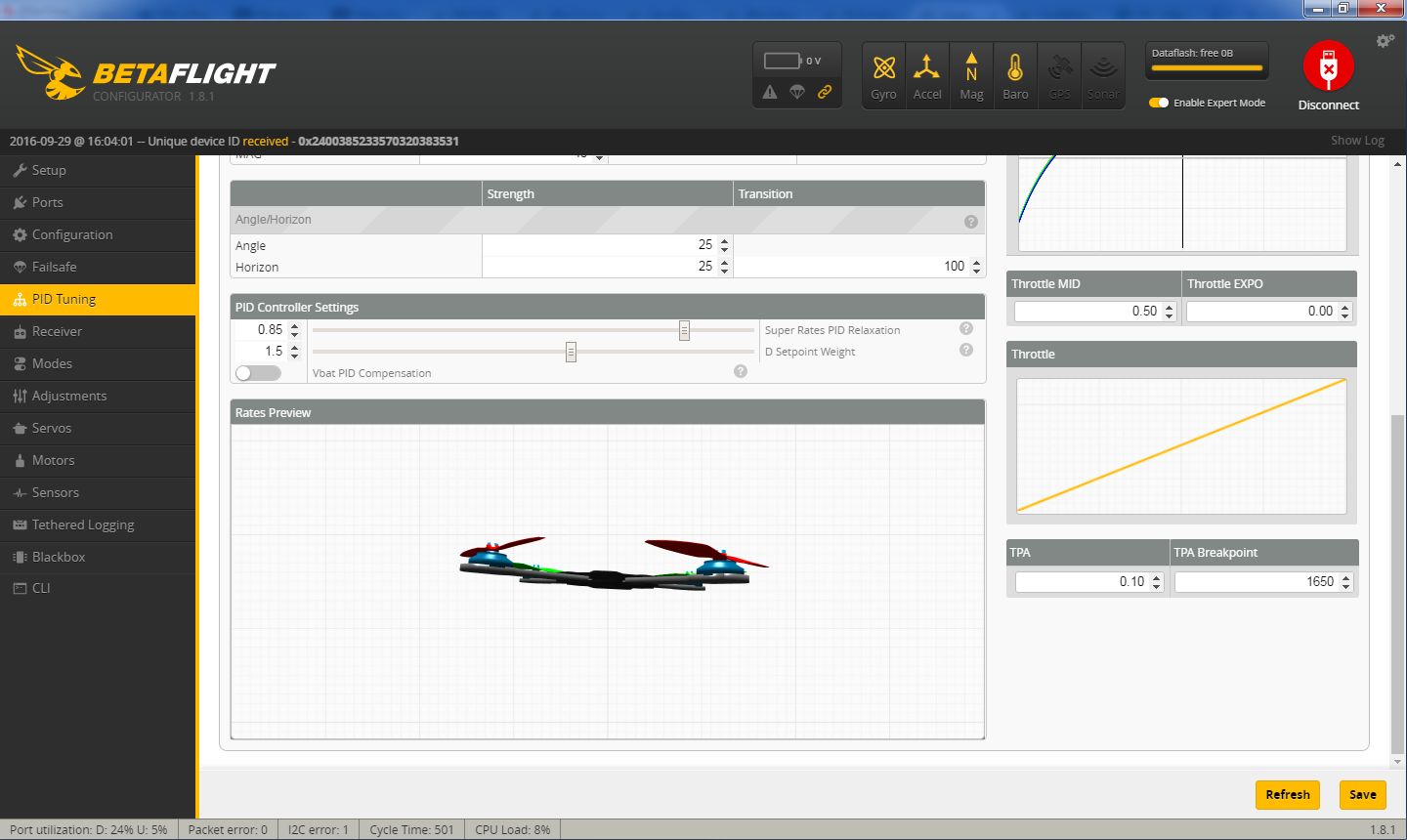
![]()
Tehát kint álltam a káposztaföldön, előttem a gépem, kezemben az USB kábel, amit rákötöttem a laptopom helyett a mobilomra. Ugyanis droidra van egy teljes értékű konfiguráló szoftver, az EZ-GUI ground station. Nem kell hozzá más, mint egy OTG kábel a mobilra, amit rákötünk a repvezérlőre, beizzítjuk a az EZ-GUI-t, majd a szoftver magyar hangon (!) kezd hozzánk beszélni. A legtöbb funkció elérhető az ingyenes változatban, így a PID tuning is, de én annyira megkedveltem ezt a kis programot, hogy kisvártatva meg is vettem. Inkább ezen app fejlesztője gazdagodjon mint egy újabb fingós appé. Aki ezt levarezolta, az pedig menjen a sarokba és szégyellje magát!

Szegény káposztáknak ez a nap úgy kezdődött, mint az összes többi, még nem sejtették mi vár rájuk.
Notehát, fogtam magam, felszálltam a géppel és ahogy azt a legtöbben tanácsolták szabad szemes irányítás mellett (LOS - Line OF Sight) átkapcsoltam a gépet “acro”-ba, és megnéztem hogy repül. Hát eléggé szarul, nagyon sok volt az alacsony-frekvenciás remegés (sok I), leszálltam és kezdődhetett maga a PID tuning. A P értéket hagytam alapon (40), az I-t meg a D-t levettem nullára. Felszállás, acro, leszállás, PID állítás követte egymást egy egész órán keresztül. Elkezdtem a P-t addig növelni, míg a gép elkezdett gyorsan remegni, a motorok zizegni (65), majd visszavettem 55-re. Elkezdtem növelni a P-t I-t, míg a gép elkezdett újból remegni (15), ám ezúttal a már említett alacsonyabb frekvencián. Visszavettem 13-ra. Itt már nem remegett nagyon a gép, csak a nagyobb nekilódulások végén hintázott egyet, de a beállított szöget jól tartotta. Felemeltem a D-t, de csak annyit, hogy nagyobb irányváltásnál a gép ne hintázzon (20). Még egy kicsit ráraktam a P-re, hogy reszponzívabb legyen, és úgy döntöttem, hogy ez így nekem jó.
Hátramaradtak a stabilizált módok, hisz én alapvetően ezeknek vagyok a nagy barátja, legfőképp a "Horizon"-nak. Ebben a módban a stick elengedésekor vízszintbe csapja magát a gép, de nincs maximum szögállás, mint az "Angle"-nél, így simán csinálhatunk bukfenceket, piruetteket, vagy akár derékszögben küldhetjük a gépet a földbe.
Stabilizált módok kapcsolásánál azonban még mindig nagyon remegett a gép, mintha túl sok lenne az I, és csak emelkedett, emelkedett. Levettem az "angle strength"-et 25-re, így már nem korrigált túl a vízszint tartásánál. Próbálgattam a különböző módokat, a gép elkezdett jól repülni, kimondottan tetszett az irányítása. Még nem volt tökéletes, de már nagyságrendekkel jobb volt mint a gyári.
Egyszer csak jött egy szellő, elfújta a gépet, én meg visszahoztam, és repültem még egy szép kört, majd leszálltam. Ebben nem is lenne semmi furcsa, csak leszállás után kapcsolt, hogy a gép ez alatt acro-ban volt. tehát annyit vacakoltam a géppel "Acro" módban, hogy alap szinten megtanultam benne vezetni. :)
Végre repülhető PID értékek!
Kezdtem nagyon Janinak érezni magam, amikor is földbe állítottam a gépet. Külsérelmi nyom nem látszott, de bármilyen módban próbáltam reptetni, újra elkezdett remegni és emelkedni, még minimális gáznál is, így majdnem elszállt a sztratoszférába, de szerencsére volt annyi lélekjelenlétem, hogy nyomtam neki pár bukfencet, amivel elég magasságot vesztett, hogy vissza tudjam hozni.
Mint később kiderült megsérült az egyik propeller és kiesett az egyik csavar a bal hátsó karból, ami annyi rezgést generált a kocsonya merevségű ABS testben, hogy meghülyítette a repülésvezérlőt.
A géptörzsből áttettem a csavart az inkriminált karba, a gyári ócska propok helyett rácuppantottam a szinte törhetetlen 6040-es KingKongokat, és voilà, a gép újra repülhetővé vált. És hogy mennyire, hát lássuk medvét! Akarom mondani a kvadkoptert!
Dulaflipp egy X1-el!!! :)
S vajon itt a vége fuss szállj el véle? Hát még nem. A PID-ek még nem tökéletesek, leginkább a "roll"-ra fér még rá a reszelés. Tervezem a magasságszenzort beüzemelni. Az Ez-Gui képes Bluetooth-on is csatlakozni, lehetőséget adva a PID állításra, valamint a gép irányítására. Az egyik motor jobban remeg, így alkalom nyílik kipróbálni Boris B notch filterét és a blackbox használatát is jó lenne elsajátítani. FPV szett sincs még rajta. Szóval van még itt anyag bőven egy újabb cikkre. A lényeg viszont az, hogy a projekt végre elérte az eredeti célját, relatív alacsony anyagi ráfordítással megverni a JJRC X1 eredeti repülésvezérlőjét.
Megjegyzés: A PID tuning során egy káposztának sem esett bántódása!