
1. CleanFlight telepítése
CleanFlight gyorstalpaló almenü
Az alábbiakban a legklasszikusabb konfigolást fogom taglalni, azaz a konfigurálló állomás, vagyis "ground station" egy PC, az összeköttetés egy USB kábelen keresztül történik, a kopter USB portja pedig a repülésvezérlőn kapott helyet.

Kezdjük az elején. Ahhoz, hogy a kopterunkkal kommunikálni tudjunk USB-n keresztül, szükségünk lesz egy szokványos micro-USB kábelre és egy úgynevezett FTDI driverre. A kopterunkkal ugyanis, most kapaszkodjunk meg, még mindig az ezeréves soros porton kommunikálunk. Az FTDI pediglen nem más, mint egy USB - soros port konverter.
A legtöbb géphez a CP210x USB to UART Bridge VCP Driver lesz szükséges. Ilyenek az Eachine Falcon szériájának F3 vezérlős gépei, ide értve a Falcon 180-asomat, a NightHawk 280 pro alaplapját, valamint a az átépített JJRC X1-em repülésvezérlőjét. Ez utóbbi azonban olyan pici, hogy az FTDI nem fért rá, így ezt külön kábellel kell csatlakoztatni, amit nagyon könnyű megsütni.
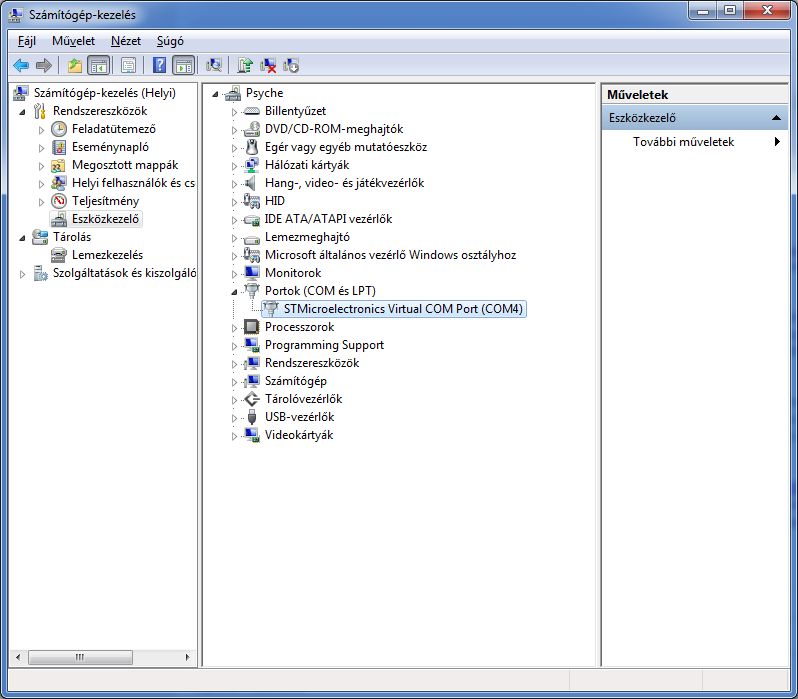
A Tiny QX80-on azonban más áramkör felelős a soros port emulációjáért, így ide az STM32 Virtual COM Port Driver lesz szükséges. Ez utóbbi telepítésében külön öröm, hogy a driver telepítése után, ha csatlakoztatjuk a kopterunk, külön meg kell keresni az ezközkezelőben az újonnan létrejött virtuális soros portot, majd tallózni hozzá a már egyszer telepített soros port drivert. User friendly? A f*szom!
Amikor ezen túl vagyunk telepítsük a Google Chrome-ot majd adjuk hozzá a Cleanflight Configurator kiterjesztést. Ha ezen is túlverekedtük magunkat, indítsuk el a CleanFlight-ot, hogy az alábbi üdvözlőképernyő fogadjon.
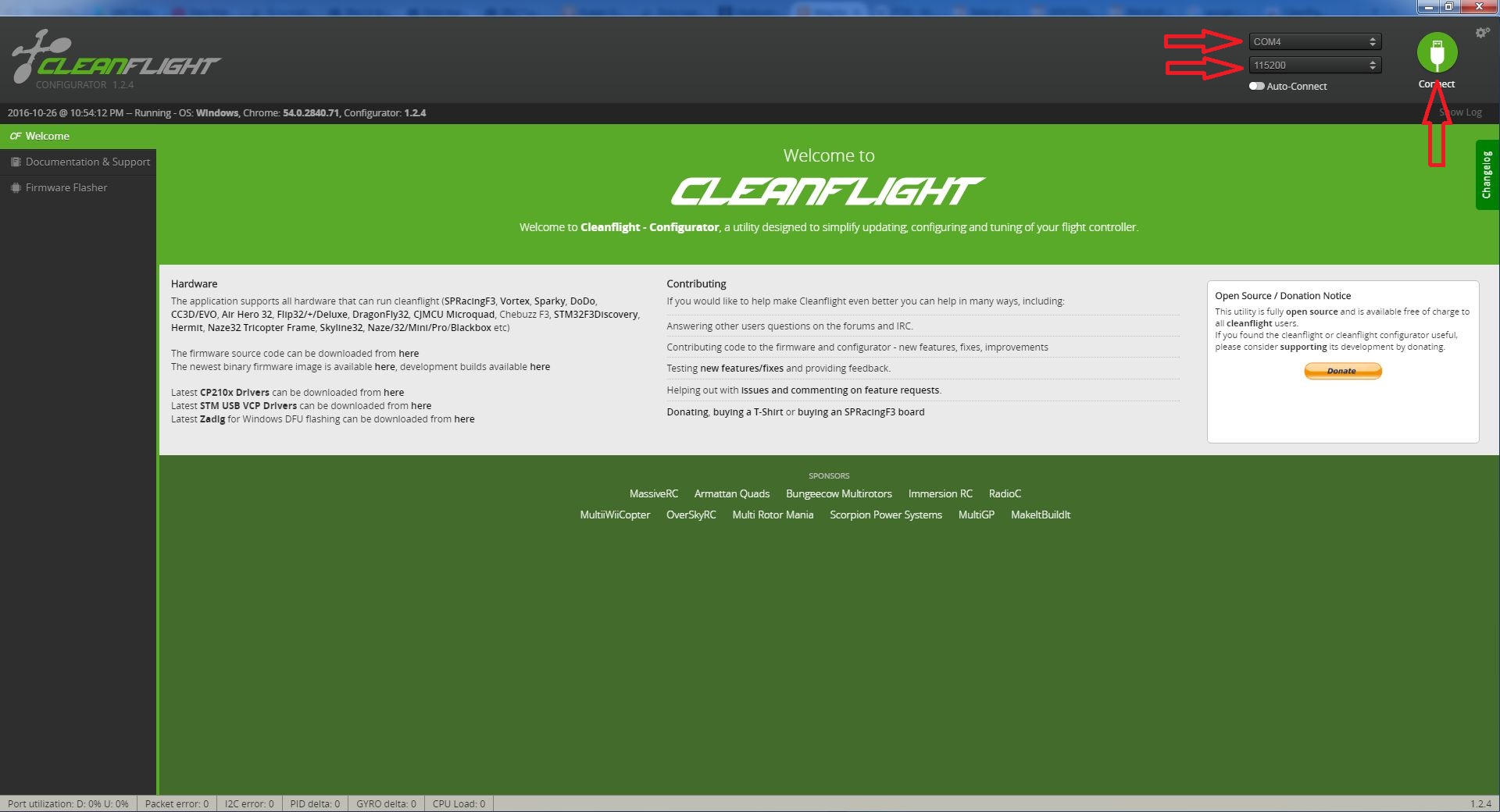
Jobb oldalt fent válasszuk ki azt a virtuális soros portot, amit az előbb beállítottunk (estünkben COM4) majd kattintsuk a Connect gombra. Amennyiben nem akar csatlakozni, próbáljunk az alapértelmezett 115200 baud rate-nél alacsonyabb átviteli sebességet választani. Az előbbieket a képen piros nyíllal jelöltem.
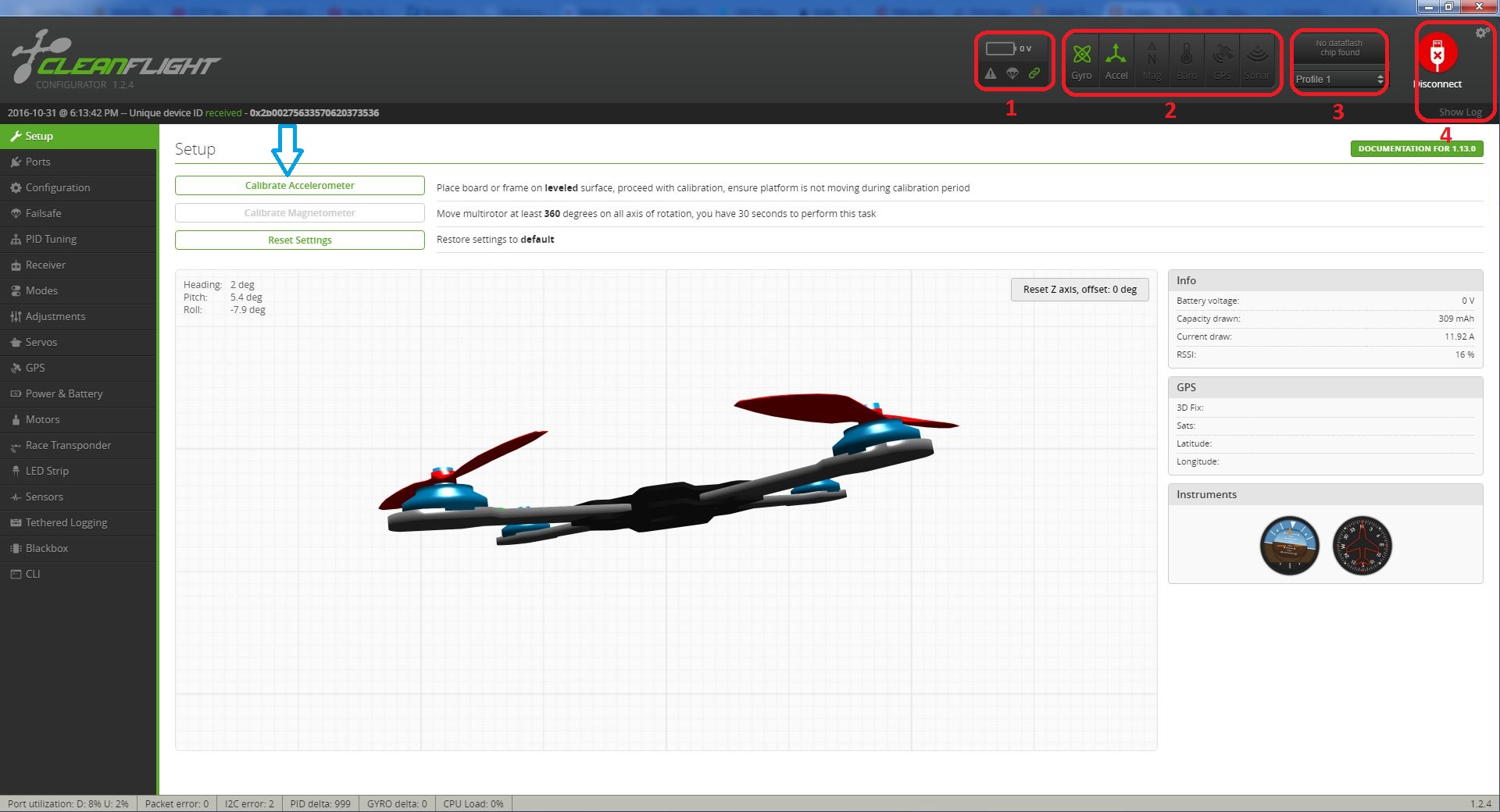 Amennyiben a kapcsolódás sikeres volt, megjelenik a Setup menü. Ennek közepén egy batár virtuális kopter fogad, ami valós időben követi a valós kopterunk mozgását.
Amennyiben a kapcsolódás sikeres volt, megjelenik a Setup menü. Ennek közepén egy batár virtuális kopter fogad, ami valós időben követi a valós kopterunk mozgását.
Jobb oldalt fent egy információs sáv jelenik meg (piros keretek), ami kopterünk fontosabb tulajdonágairól tájékoztat. Az első az akkumulátor feszültségéről, a motorok kibiztosításáról (arm/disarm), a failsafe valamint a kapcsolat létrejöttéről tájékoztat. Másodikról kopterünk képességeit taglalja. Mivel a kopterünk 6 DOF vezérlővel rendelkezik, így csak a giroszkóp és a gyorsulásmérő aktív. Amennyiben 10 DOF vezérlőnk lenne, bezöldülne a magnetométer és a nyomásmérő is. Az utolsó kettő a GPS és a szonár, de ez már nem kezdőknek való vidék, habár ezek sem harapnak. Amennyiben a QX80 tartalmazna flashchipet a fekete doboznak, ennek a telítettségéről a harmadik keretben egy zöld sáv tájékoztatna. Alatta a választott profil látható. A legtöbb "XYflight" firmware automatikusan az első profilt használja, amik közt aztán a távunk, OSD segítségével stb. válthatunk. A lelki békénk megőrzése végett egyezzünk ki az első profillal.
A kapcsolódás tehát sikerült, ugorjunk vissza a főmenübe.




