C4002 / Tarantula FPV tuning
Kendács vasárnap / filléres KopterTrükk
FPV-zni márpedig jó. Ha valami kizökkent ebből az élményből az pedig nem az. A C4002-nek 200mAh akkuja van, ami bizony maximum egy negyed órát bír felvétel nélkül, aztán lehet háromnegyed órán át tölteni a gyári töltőjével. Sajnos, amikor a kamera be van kapcsolva, nem lehet kívülről táplálni, ígyhát másvalamit kellett kitalálni. Gondolkoztam step-down konverteren, hogy majd megtáplálom 4,2V-al az MJX X600 7,4 voltos akkujáról, azonban olyan infóhoz jutottam, hogy ezeknek heppje beakadni 2V alatti feszültségkülönbségnél, így inkább ezt elvetettem. Később kiderült, hogy alaptalan volt a félelmem, például ennél a buck converternél ilyet nem tapasztaltam. Végül azt találtam ki, hogy megtáplálom egy külső akkuról.

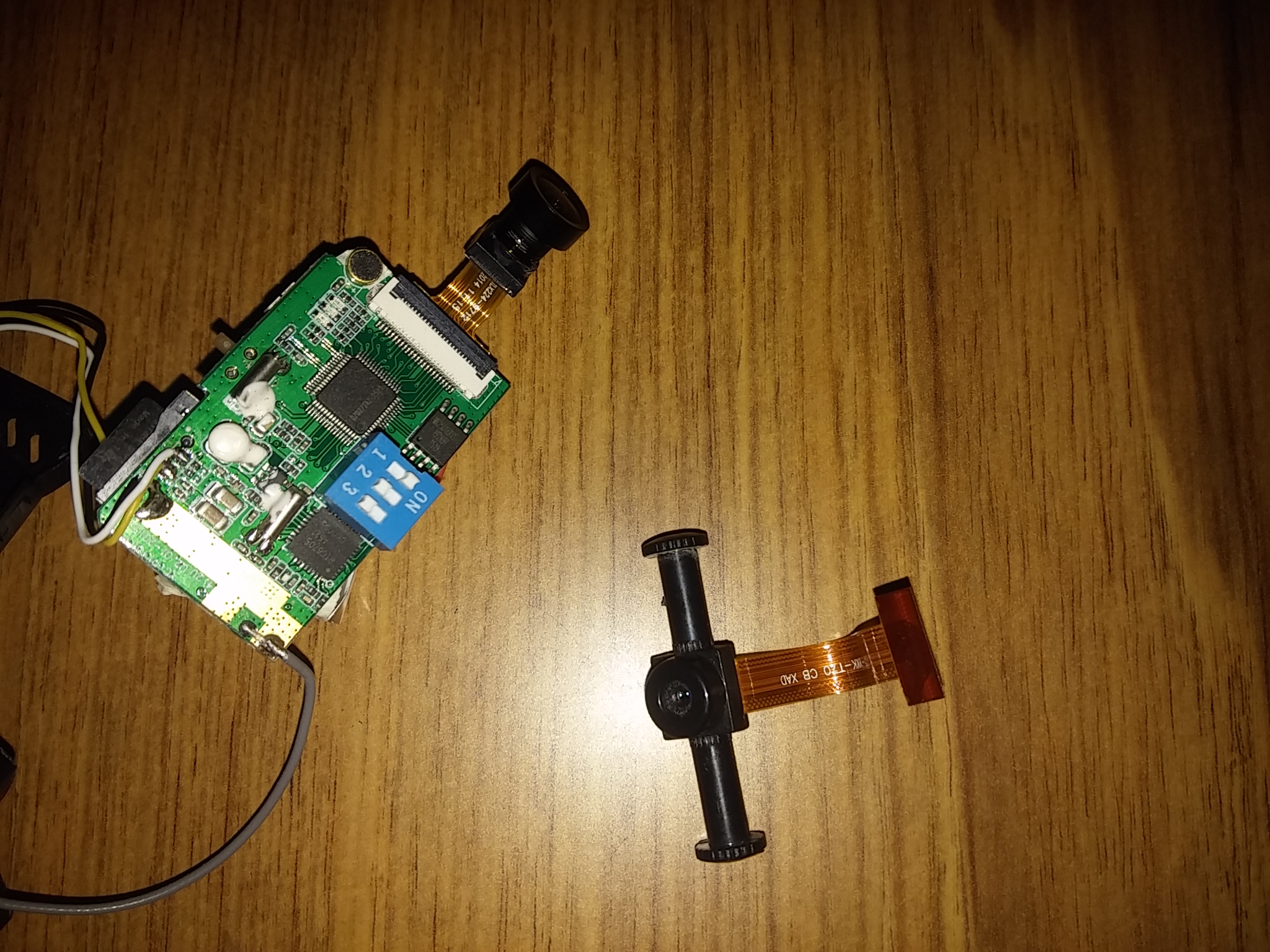
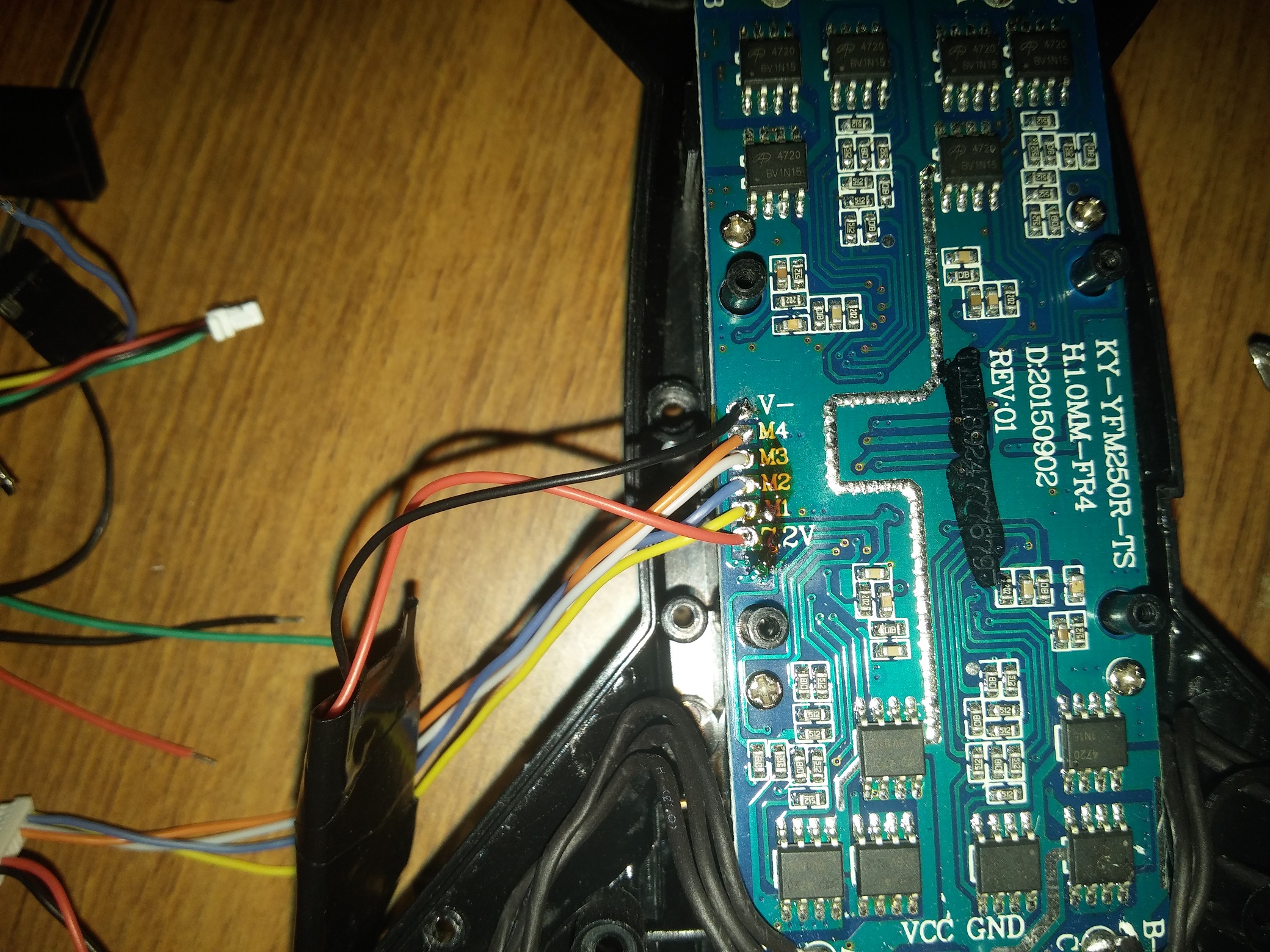
Az egész kamerát két csavar tartja egyben meg egy pánt. Elég könnyen szétszedhető. Leforrasztottam az akut, a helyére forrasztottam egy Micro-Losi / Syma catlakozós kábelt ami boldogult ifjúkorában egy JJRC H8 mini töltőn fityegett. Persze előtte kötöttem rá egy csomót. Na, nem azért, hogy el ne felejtsem, hanem hogy az akku rángatásánál ne a NYÁK (nyomtatott áramkör) szenvedjen. Mellesleg az elektromérnökök minden évben megünneplik A NYÁK Napját.

Egyedül arra kell vigyázni, hogy az akku vezetékéhez nagyon közel helyezkednek el apró SMD alkatrészek. Ezekre vigyázzunk, mivel profi műszerek és gyakorlat nélkül embert próbáló feladat visszaforrasztani.
Próba gyanánt felhelyeztem a 808 #16 keychain cam D lencséjét, de a nagy látószögnek köszönhetően minden olyan apró lett, hogy visítva raktam vissza a régi lencsét. Szóval rendesen működik, aki a nagylátószöget szereti, nyugodtan használja, nekem nagyon nem volt szimpatikus.


Összeszereltem a kamerát, és kész volt a mestermű.
Amikor az U807-re pattintom fel a kamerát, akkor a H8 mini 150mAh akkujaival etetem. A hatótáv így 150-160 méter Boscam vevővel és lapantennával. Persze a lapantennára merőlegesen, oldalirányban kb. 30-40m, eléggé zizisen. Felvétellel kb. 5-6 percet bírnak. Az 5. percnél eléggé lecsökken a hatótáv, ekkor már érdemes haza jönni.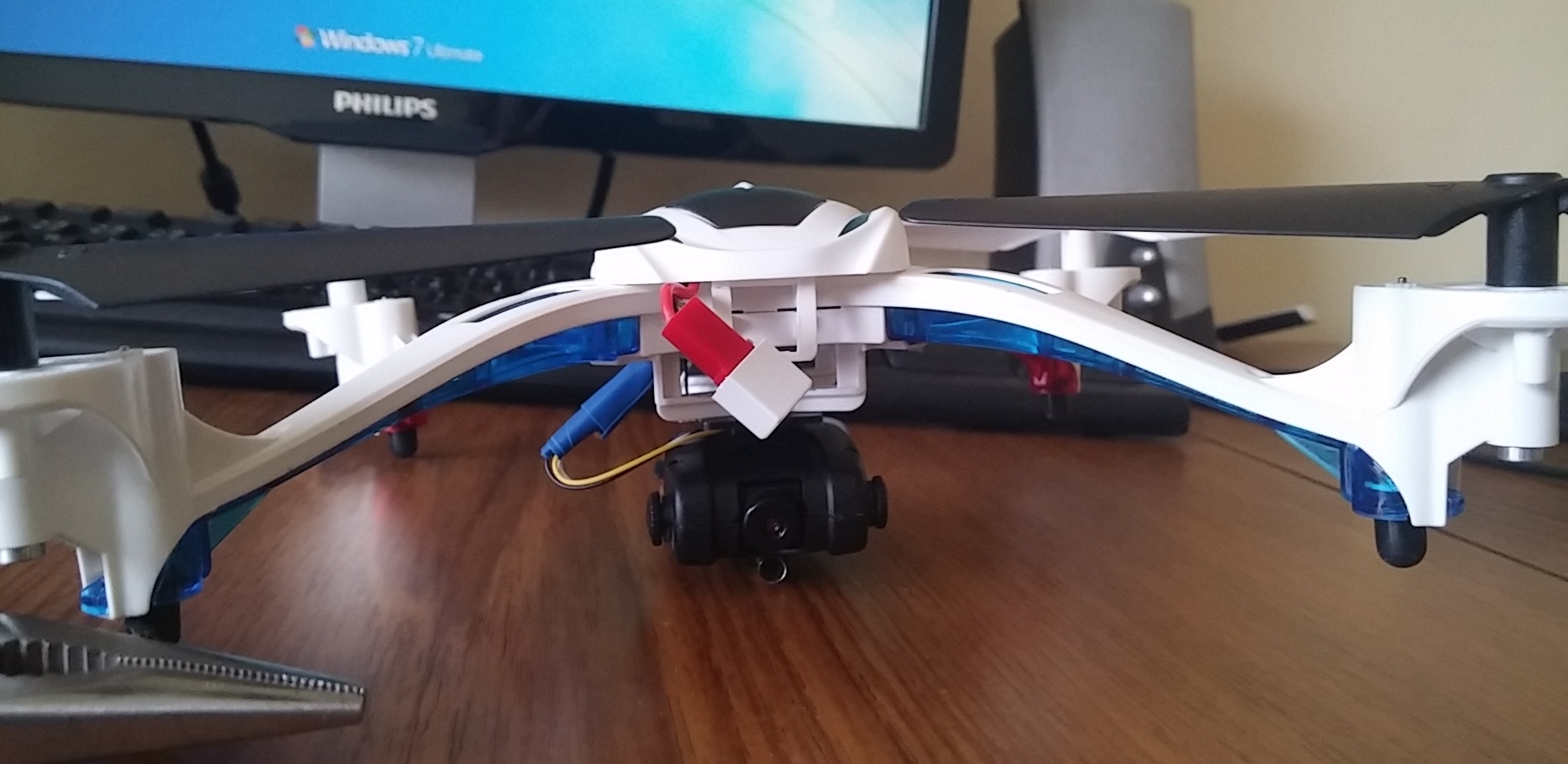
A JJRC X1-nél az U807 akkujait használom. A nem gyár 750mAh akkukal meg szokott lenni a 170 méter is, enyhe takarásban. Valószínű nyílt terepen még több lehet. Felvétellel nyugodtan megvan 15 perc kellemes hatótávval. Persze mehetne tovább is, de én a nagyobb hatótávot preferálom.

Figyelem, mindig állítsuk le a felvételt akkucsere előtt, mert az utolsó videó sérül, és az SD kártyán csak egy 2kB-os állomány marad. Talán valami fájlvisszaállító programmal helyre lehet pofozni, de eddig nem nagyon törtem vele magam.
Mellesleg a felvétel elindításához, leállításához nem kell csatlakoztatni a géphez. Elég, ha összeérintjük a sárga és fekete vezetéket kb.egy másodpercig. Mivel a C4002 nem kompatibilis a JJRC X1 kameraportjával (4 vs 3 pin) én fogtam, és megblankoltam a vezetéket. Lényegében úgy indítom a felvételt, mint az egyszeri autótolvaj lopott kocsit az amerikai filmekben.
Ennyit a C4002 modolásáról, FPV-re FEL!

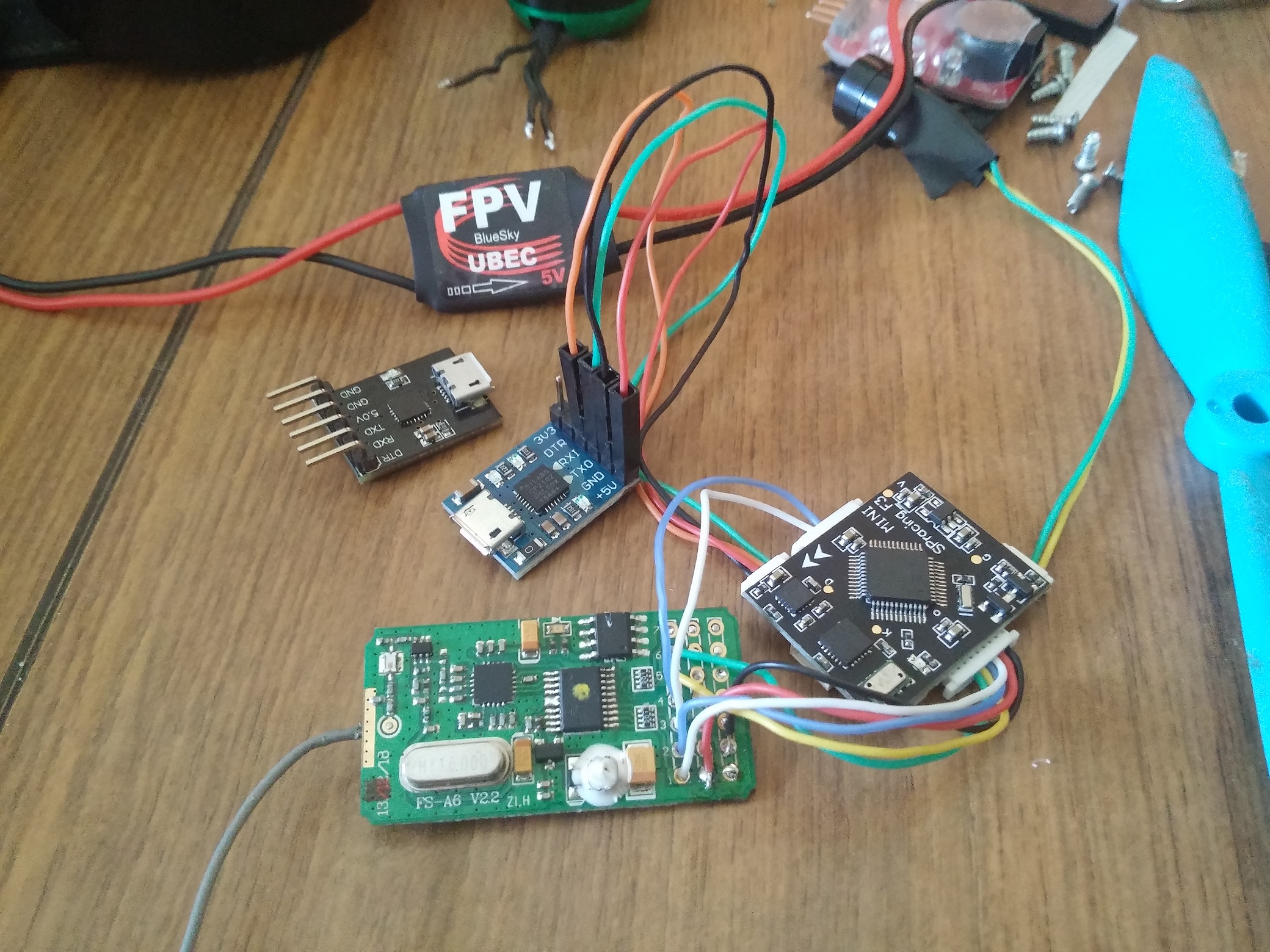
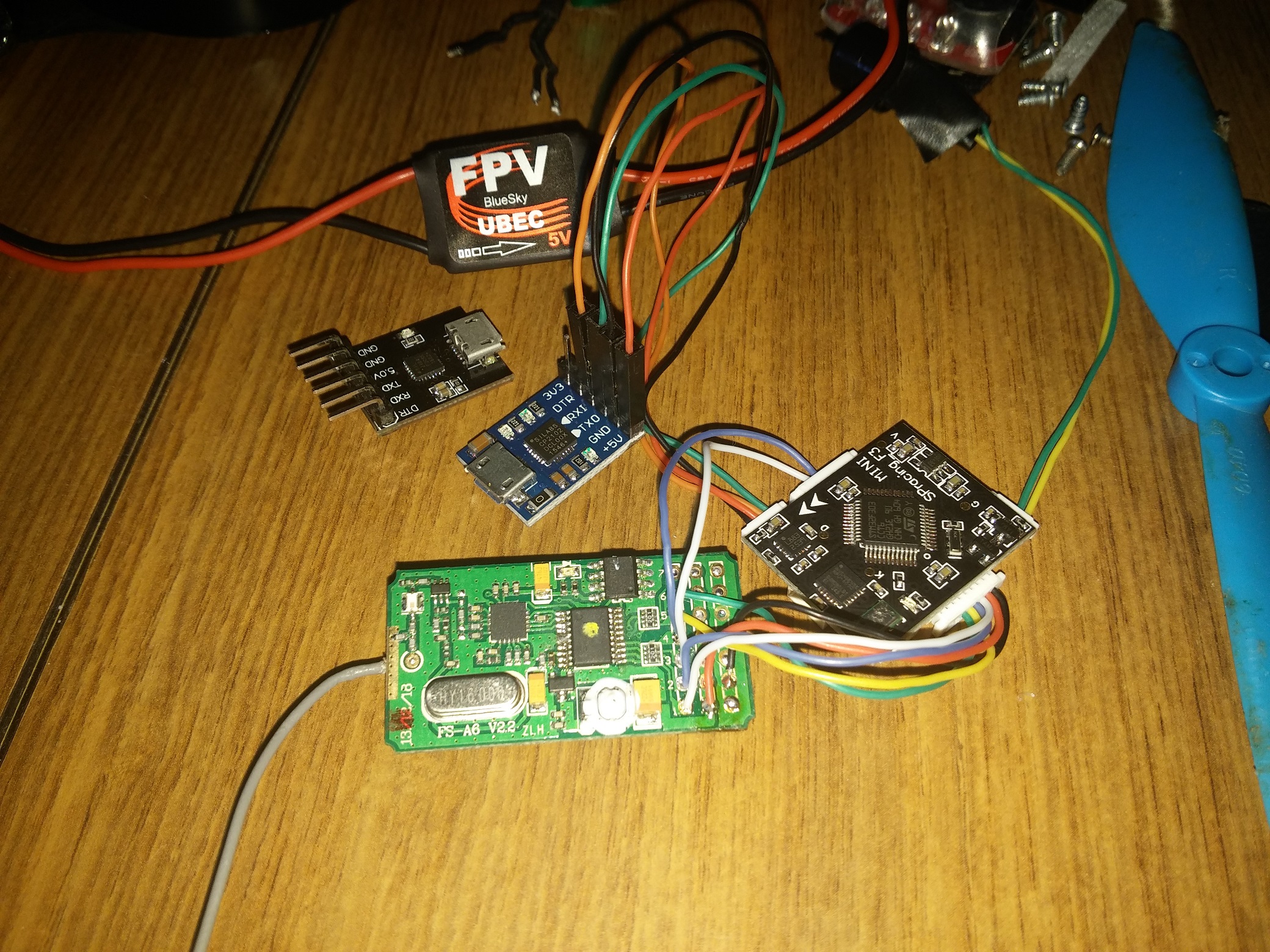
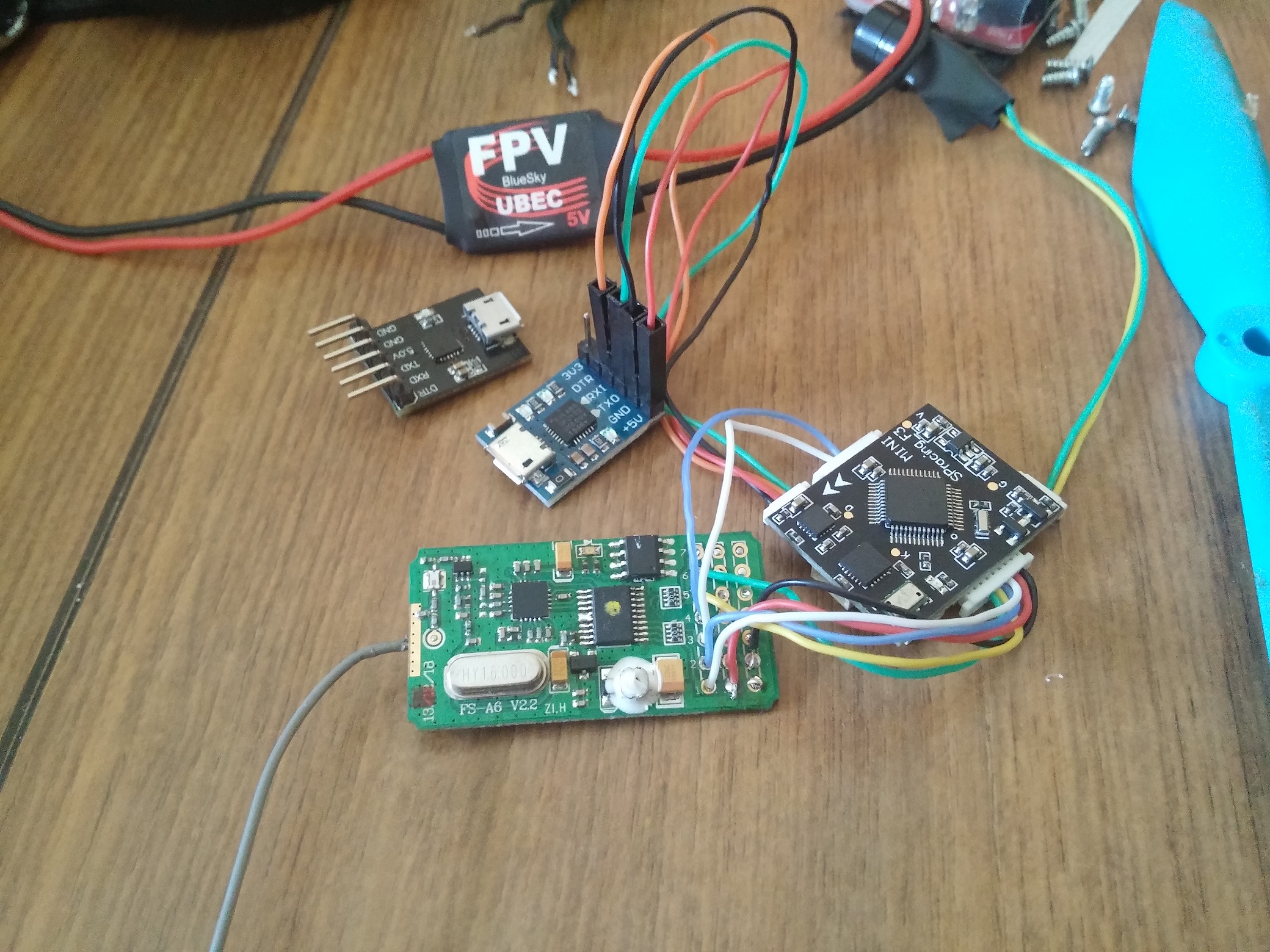
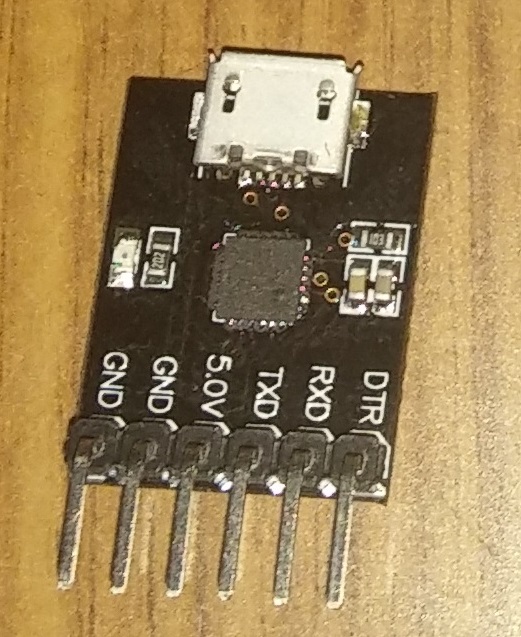
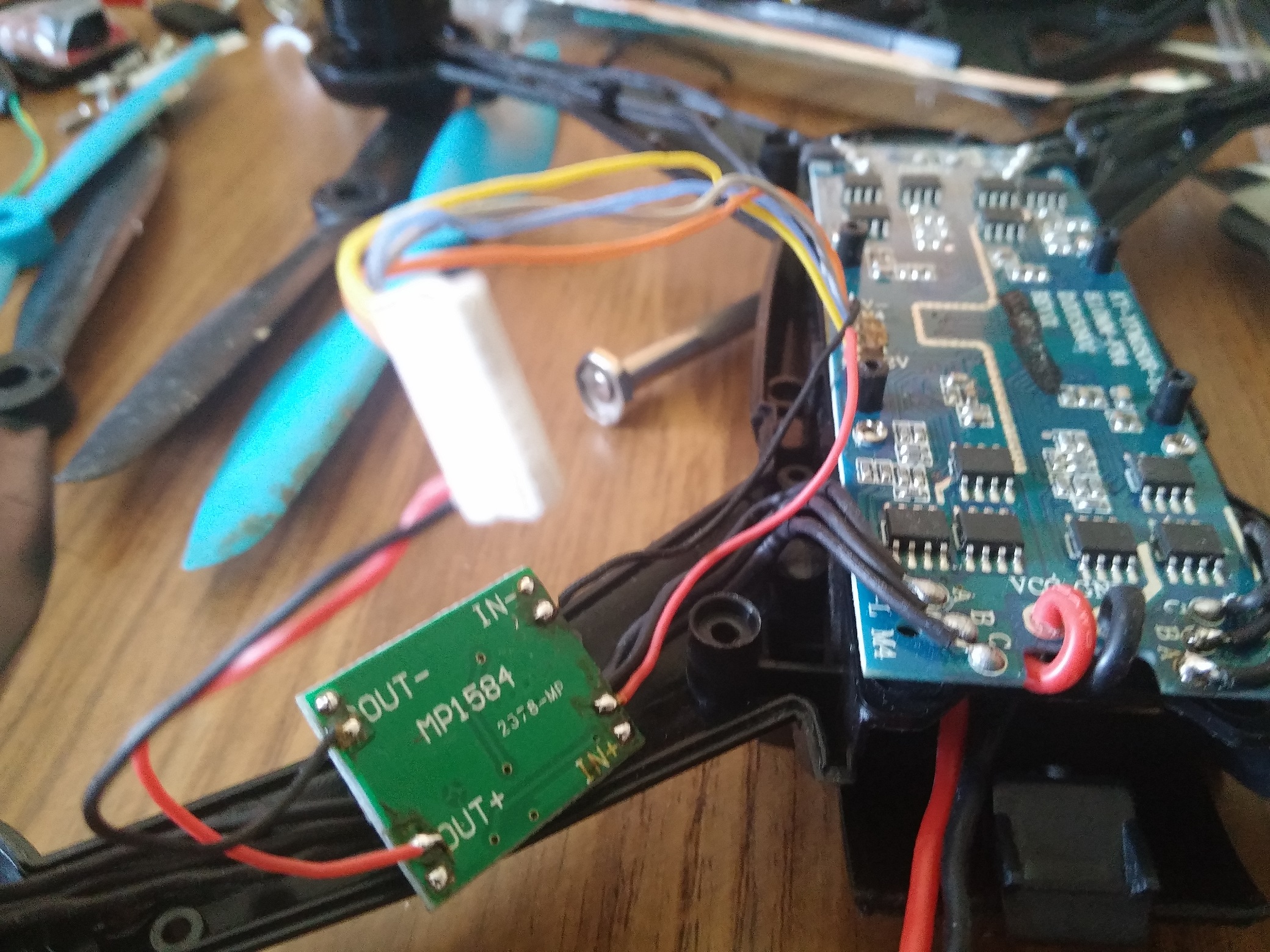 A buck converter jól bekötve!
A buck converter jól bekötve!

 A képen az RC832 vevő RP-SMA nőstény pöcke. Ennek kellet helyet képezni a sodort vezetéknek az antennacsatlakozón belül.
A képen az RC832 vevő RP-SMA nőstény pöcke. Ennek kellet helyet képezni a sodort vezetéknek az antennacsatlakozón belül. A csatlakozó közepében a rézerek várják a vevő pöckét
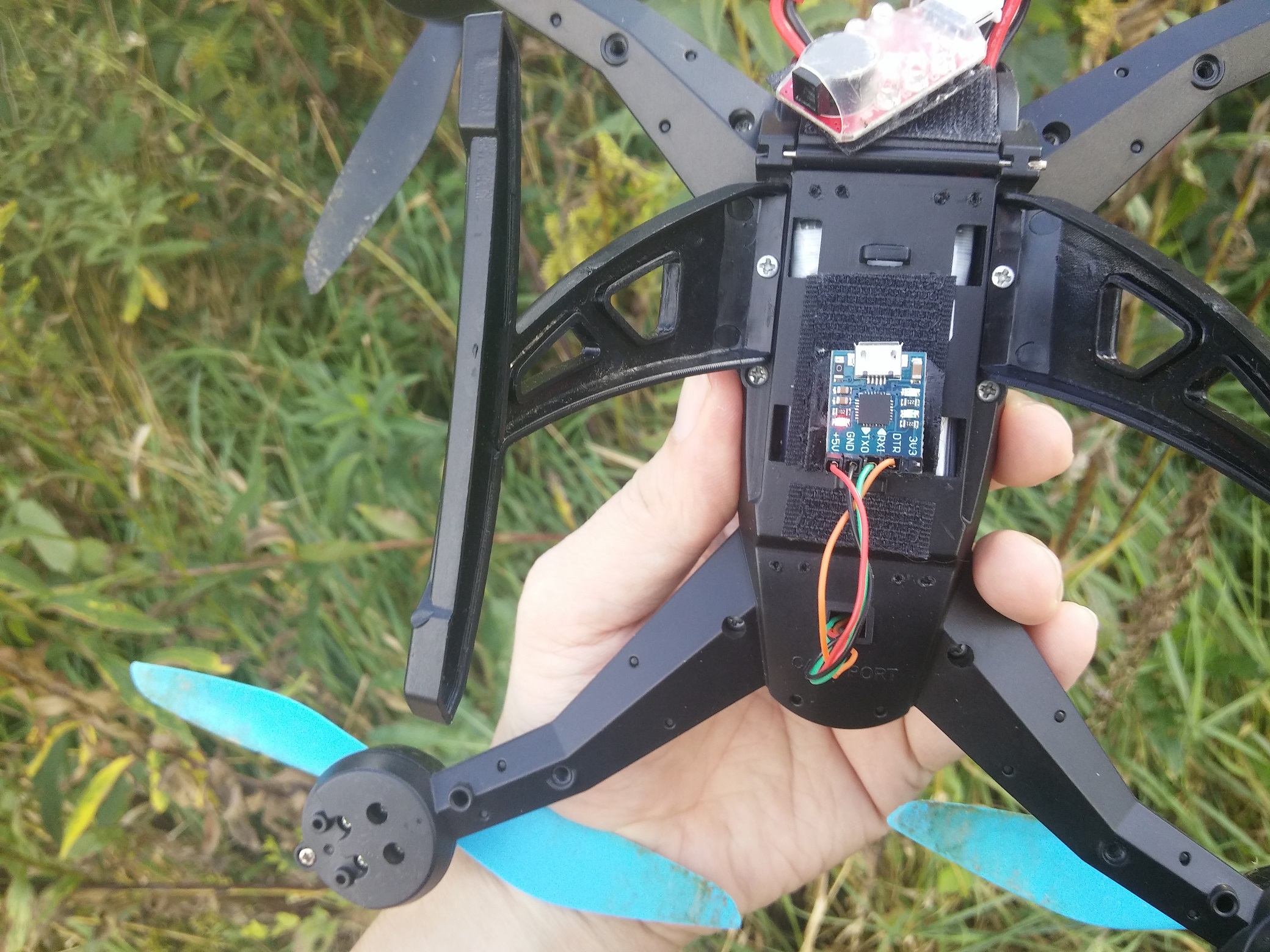
A csatlakozó közepében a rézerek várják a vevő pöckét Összerakva valahogy így fest. Ronda, ronda, nem kiállításra megy, a sisakból meg úgysem látom. :D
Összerakva valahogy így fest. Ronda, ronda, nem kiállításra megy, a sisakból meg úgysem látom. :D
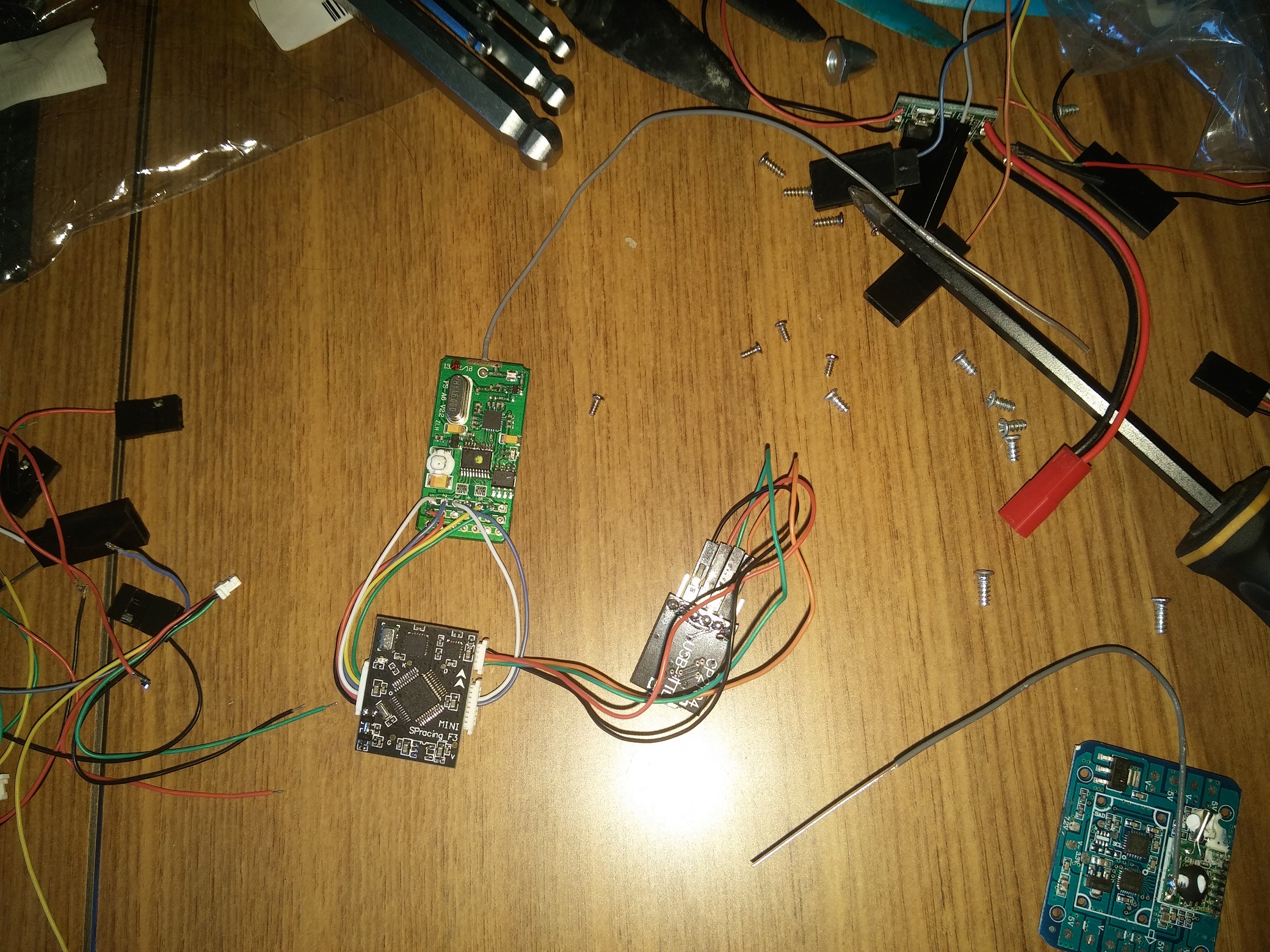



 A szerencsétlen áldozat
A szerencsétlen áldozat