
JJRC X1 agyműtét - 3. rész
Kevesebb nyelés, több élvezet - avagy mire jó a tükörragasztó

Szevasztok!
Legutóbb ott tartottam, hogy az agytranszplantáció ugyan sikeresen végbement, ám közbejött egy kis komplikáció a kommunikációs csatornában. Magyarán a repülés-vezérlő USB-serial konvertere megsült, két hétre kényszerpályára késztetve a projektemet. Egyből hármat rendeltem, mert nem akartam további csúszást kockáztatni és így még olcsóbb is.
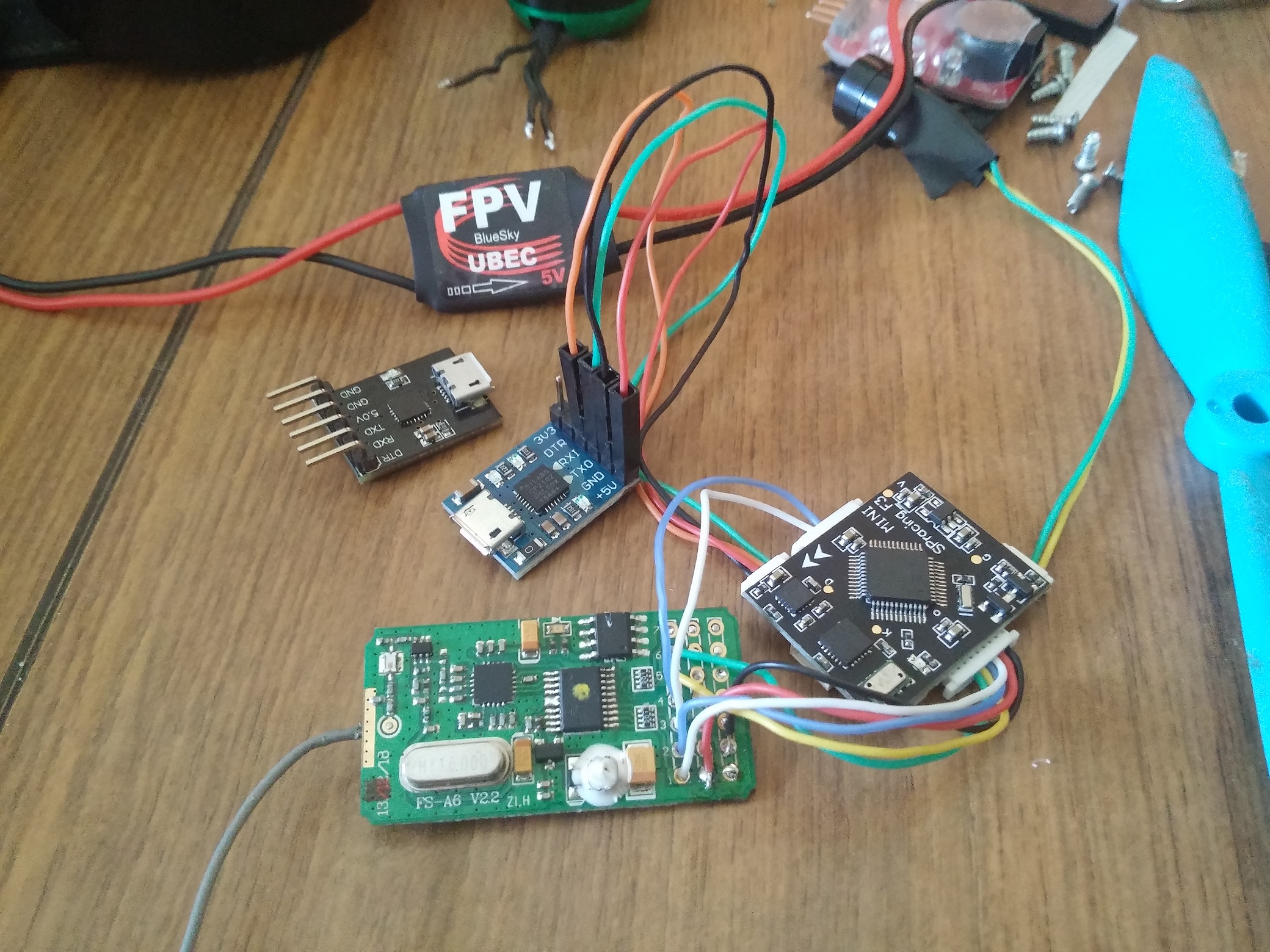
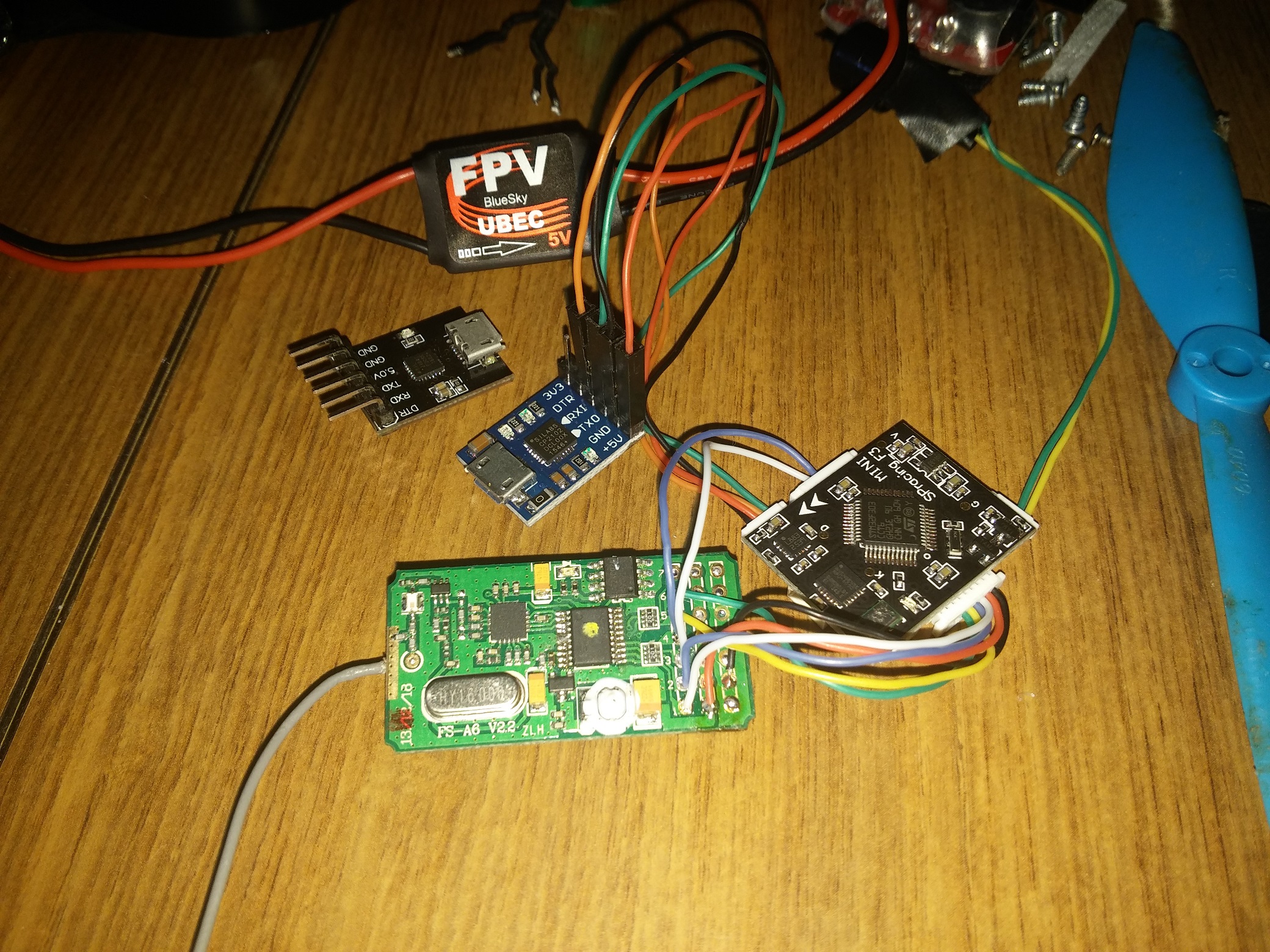
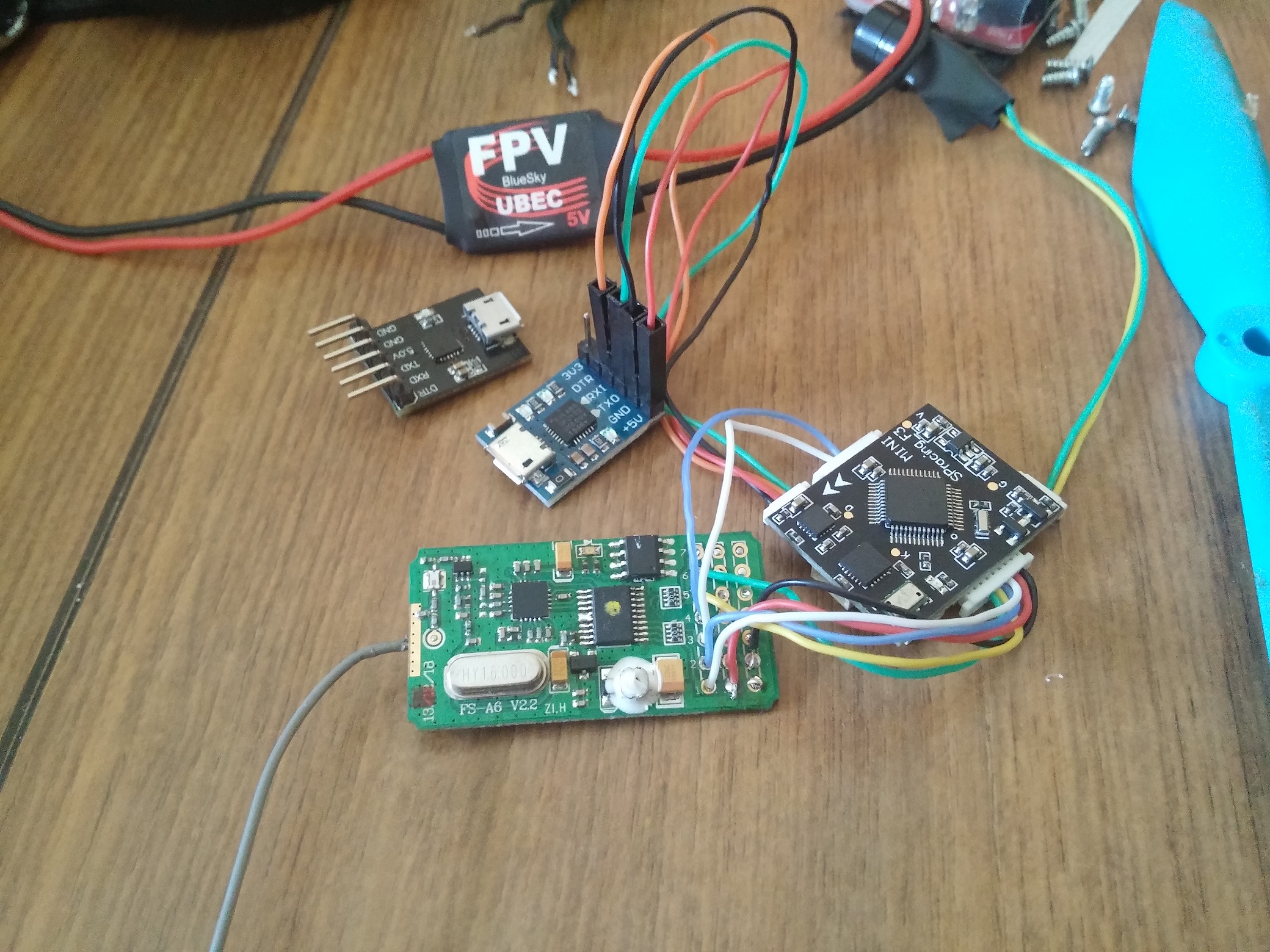
Szerencsésen megjött az új konverter, újból szétkaptam a gépet, és széles vigyorral az arcomon konstatáltam, hogy az F3 micro egyik soros portja sem sült meg, és kompatibilis az új USB konverterrel. Az új konverter lábelrendezése kicsit más, az alábbi fotókon látható a bekötése.
Nem hagyott nyugodni, hogy mégis mitől égett ki az előző USB kütyü. A buck converterre gyanakodtam, és igazam lett. 7,4 voltos betáp mellett 6,9V-ot adott ki magából 5V helyett. Csoda, hogy az F3 és a vevő túlélte. Már épp kezdtem szidni a kínai mérnök felmenőit, amikor azt vettem észre, hogy a buck convertert fordítva kötöttem be. Gyorsan megfordítottam, és kiderült, ez is túlélte, többszöri kísérlet után is tartotta a beállított 4,98V-ot.
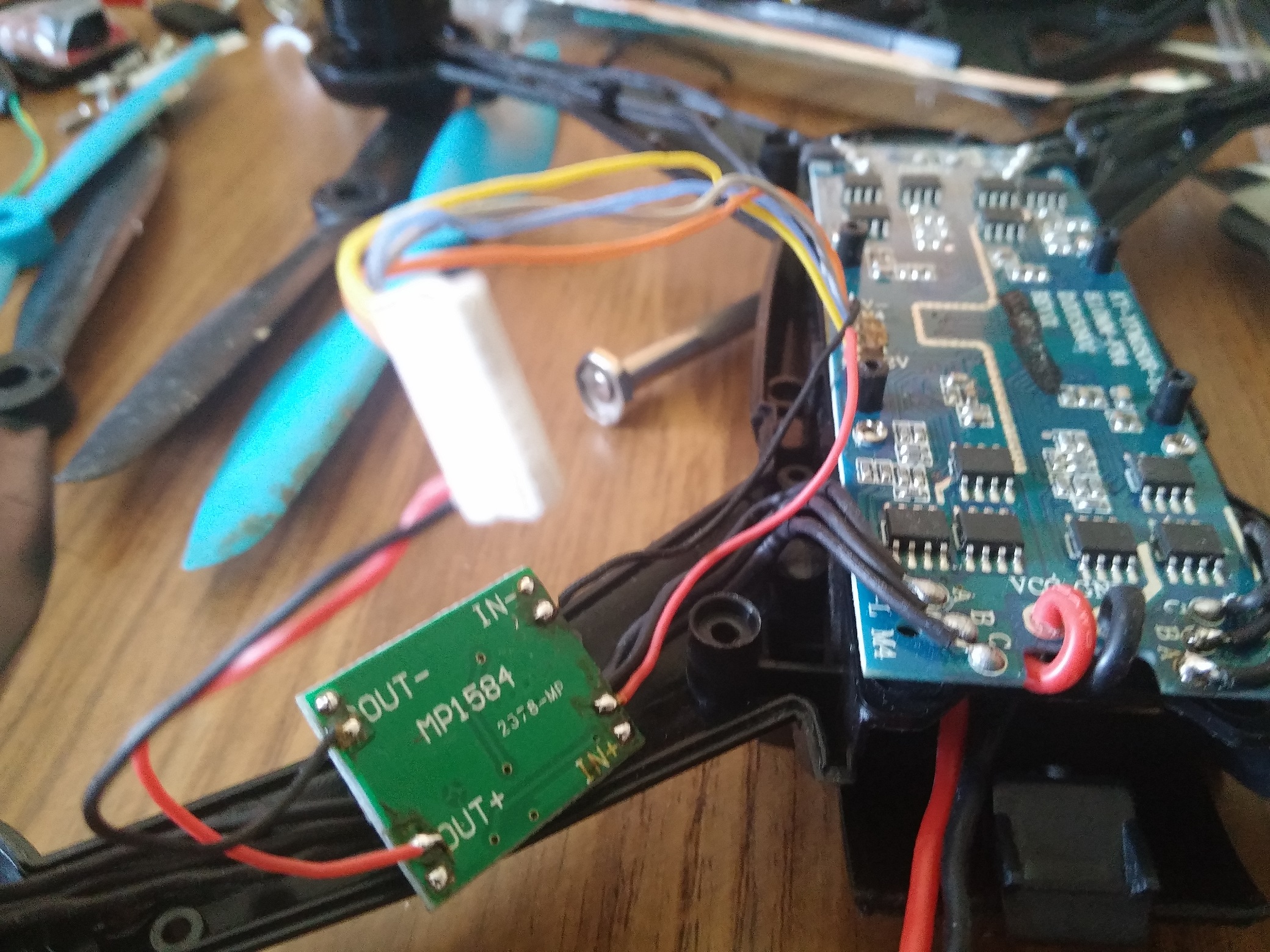 A buck converter jól bekötve!
A buck converter jól bekötve!
Ha már egyszer a gép szét volt kapva, úgy döntöttem, hogy az öntapadós tépőzárat (velcro / magic tape) lecserélem kétoldalú ragasztóra. Tettem ezt azért, mert a velcro túl vastag volt, így megnehezítette az összeszerelést, meg nem is tartotta túl stabilan az alkatrészeket. A kétoldalú ragasztó nem hagyományos, hanem sokkal erősebb, tükör rögzítésére használják. Aki keresné a nagyobb Tesco-k barkácsrészlegében megtalálja. Előnye, hogy a teljes tapadást nem azonnal fejti ki, csak pár óra után, így marad időnk molyolni, valamint egy nagy lapban érkezik, így olyan formát vágunk ki, amilyet akarunk.

Összeszereltem a gépet, ami a kétoldalú ragasztónak hála sokkal könnyebben ment, az USB konverter kábeleit kivezettem gép hasára, majd rádugtam az USB konvertert, így kívülről is tudtam konfigolni.
Amint már említettem az SP F3 micro-n a BetaFlight-ot futtatom, annak is a legújabb, 3.0-ás verzióját. A repülés-vezérlő konfigját egyelőre nem akartam túlbonyolítani, így gyorsan beállítottam az AUX1 kapcsolót a csipogóra valamint az AUX2-re a repmódokat, az Angle/Horizon/Acro szentháromságot. Persze a failsafe sem maradhatott ki, azaz a jelvesztést hogy reagálja le a gép. Először nem is találtam meg, mert a 3.0-ás Betában jól eldugták. Csak akkor jelenik meg, ha bekapcsoljuk az “Enable Expert Mode” kapcsolót. Erről azt érdemes tudni, hogy két failsafe van:
- A vevőben - általában a távról állítjuk be
- A repülésvezérlőben - ez az, amit eldugtak a Betában
Az Emax EM-16 / FlySky A6 vevő furcsa egy jószág, ugyanis nem lehet beállítani a failsafe-et a távról, azaz milyen pozícióban legyenek az egyes csatornaértékek jelvesztés esetén. Amint elmegy a jel, fogja magát és a 3-as csatornát, ami általában a gáz, lecsapja kb. 950-re, így tudatva a külvilággal, hogy jelet vesztett.
A repülésvezérlő Failsafe fülén pedig beállíthatjuk, hogy milyen érték alatt értelmezze jelvesztésnek a vevő jelét (esetünkben pl. 970 megteszi) és mi a tököt csináljon ez esetben. Essen le vagy próbáljon landolni egy megadott gázértékkel.
Annyit még itt érdemes megjegyezni, hogy ez az F3 micro, ha az USB-ről etetjük, akkor megtápolja a vevőt és sajnos a csipogót is, így minden egyes PC-re dugás előtt érdemes bekapcsolni a távot, mert különben idegtépően visítani fog, ugyanis az összes F3, amivel eddig dolgom volt, jelez jelvesztés esetén.
A motorok vezérlője is érdekes eset. Az ESC board csakis PWM-el hajlandó kommunikálni a repülésvezérlővel az alapértelmezett úri huncutság Oneshot125 helyett. Ezt érdemes leszerelt propellerek mellett megtenni, mert ezután a vezérlő újraindul és maguktól beindulnak a motorok. Felrakott propellerekkel pedig fáj, nekem hihettek. (sírós szmájli)
Hamár ott matattam az ESC-eknél, gondoltam újrakalibrálom őket a szokásos módon, de le se bagóztak az ESC-ek, ígyhát hagytam a fenébe.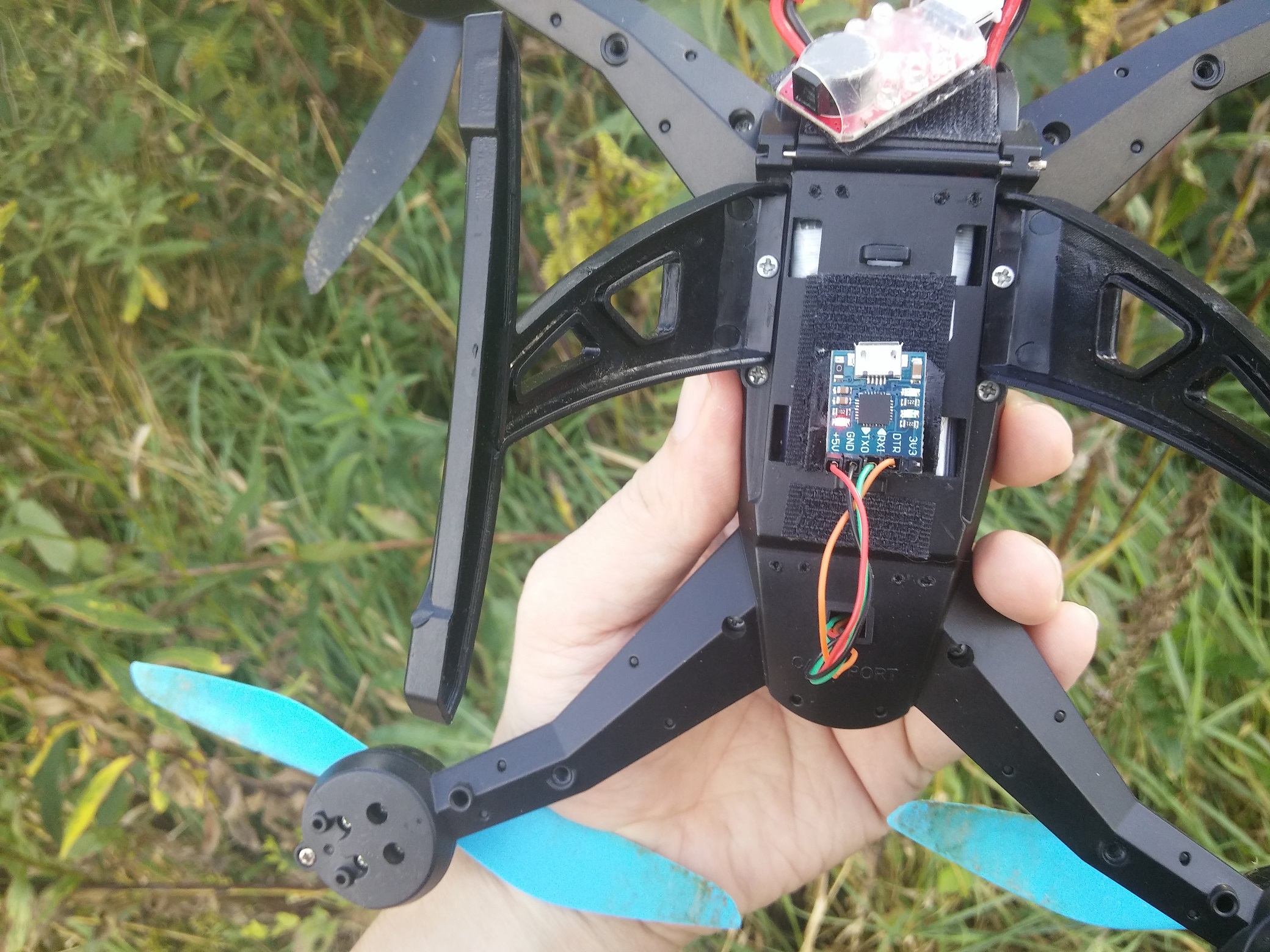
Tehát, miután bekonfigoltam a repmódokat és a buzzert BetaFlight 3.0 alatt, kipróbáltam a szobámban, hogy is repül a gép. Ezt az ún. PID (Proportional, Integral, Derivative) értékek határozzák meg. Jelentem, jelenleg az SP F3 alapbeállításokkal ebben a gépben használhatatlan. Elkezd jobbra-balra imbolyogni, mint egy részeg kacsa, és csak emelkedik, emelkedik. Ezt a fal bánta. Miután ki lettem vágva a természetbe, jöhetett a PID tuning. Még a gép akkufedelére rácuppantottam egy low voltage buzzert, indulhatott a PID reszelés, hogy a gép jól repüljön! Vagyis, egyáltalán repüljön. Gondoltam öt perc alatt végzek. Mentségemre szóljon, hogy még fiatal voltam és naiv. :)
A PID mibenlétről nem fogok bővebben értekezni, ZsoleszFPV már írt róla magyarul. Akinek a PID nem sokat mond, az házi feladatként fussa át az előbbi link alatt található bejegyzéseket, hogy a következő cikkem a PID faragásról ne hasson latinórának a kínai negyedben. Abszolút nem fáj, én is tőle tanultam, és innen is szeretném megköszönni a minőségi cikkeket!
U.I. akit az egész PID tuning hidegen hagy, az se csüggedjen, a következő cikk végén megosztom a PID értékeimet, így elég lesz őket csak bemásolni repülésvezérlőbe és kész.




