Megfontolandó atyai tanácsok kezdő racer pilótáknak
Ha rám hallgatsz, és miért ne tennéd, akkor maradsz brushed vonalon, nem futsz neki mindjárt a brushlessnek. Persze ez alatt nem a H8 minit értem, hanem veszel egy gépet az Eachine Tiny QX szériából vagy a KingKong mikrogépeiből, hozzá egy távot és FPV szemüveget. A QX-ek közül szinte mindegy melyiket veszed, a legkedveltebbek a QX95, QX90, QX80. Ez utóbbiról a review-m itt találod. Nem fogsz szívrohamot kapni, ha odacsapod a gépet, minden filléres, és általában mindig van egy akció. Így márcus elején például az EX100 van aprópénzért. Nem kell törődnöd az ESC-ek flashelésével és a BorisB féle kismillió ESC protokollal, amitől még Hitler is agyvérzést kap.
 A tiny QX-nál a távirányítója veszélyesebb. ;)
A tiny QX-nál a távirányítója veszélyesebb. ;)
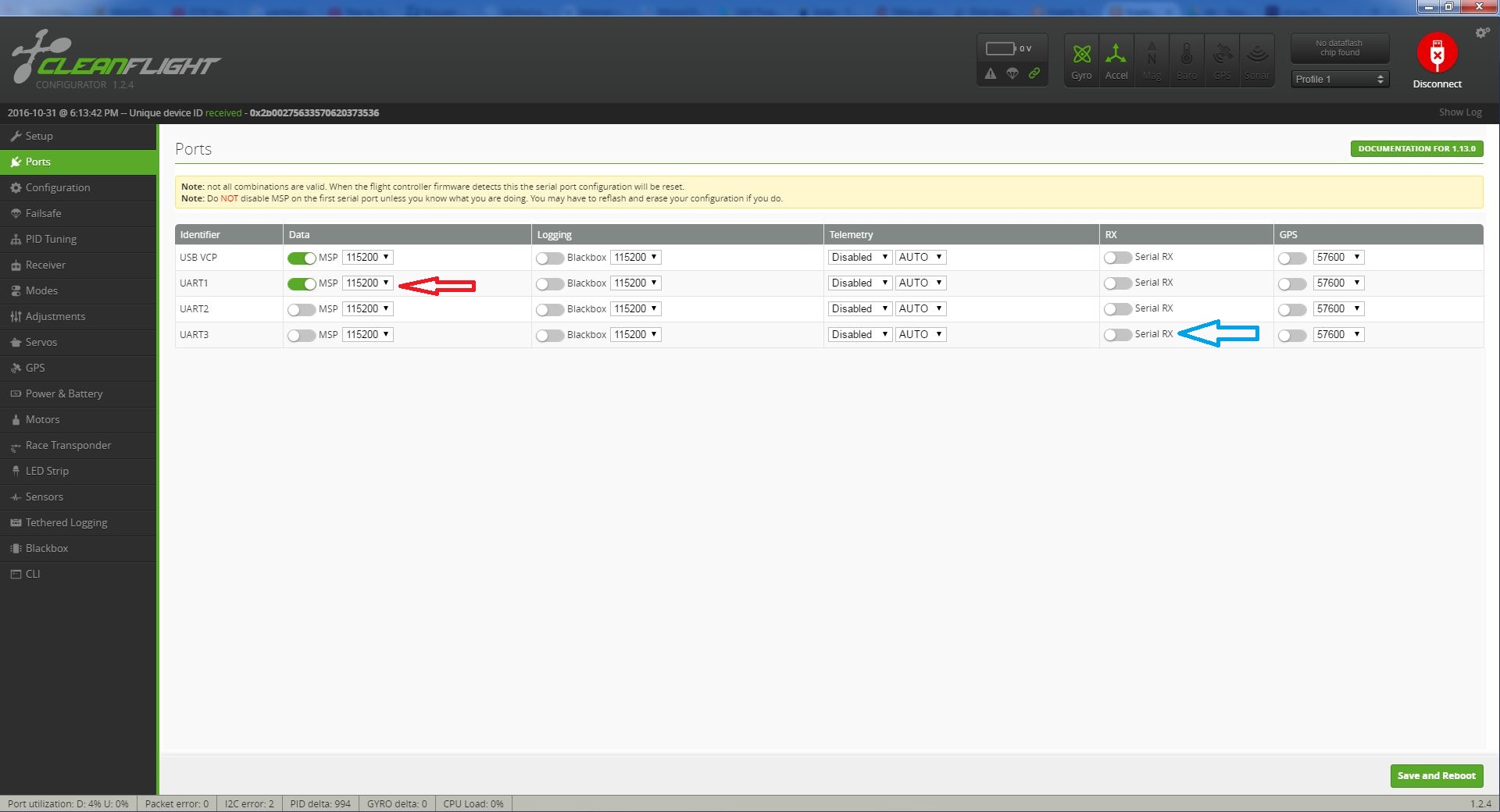
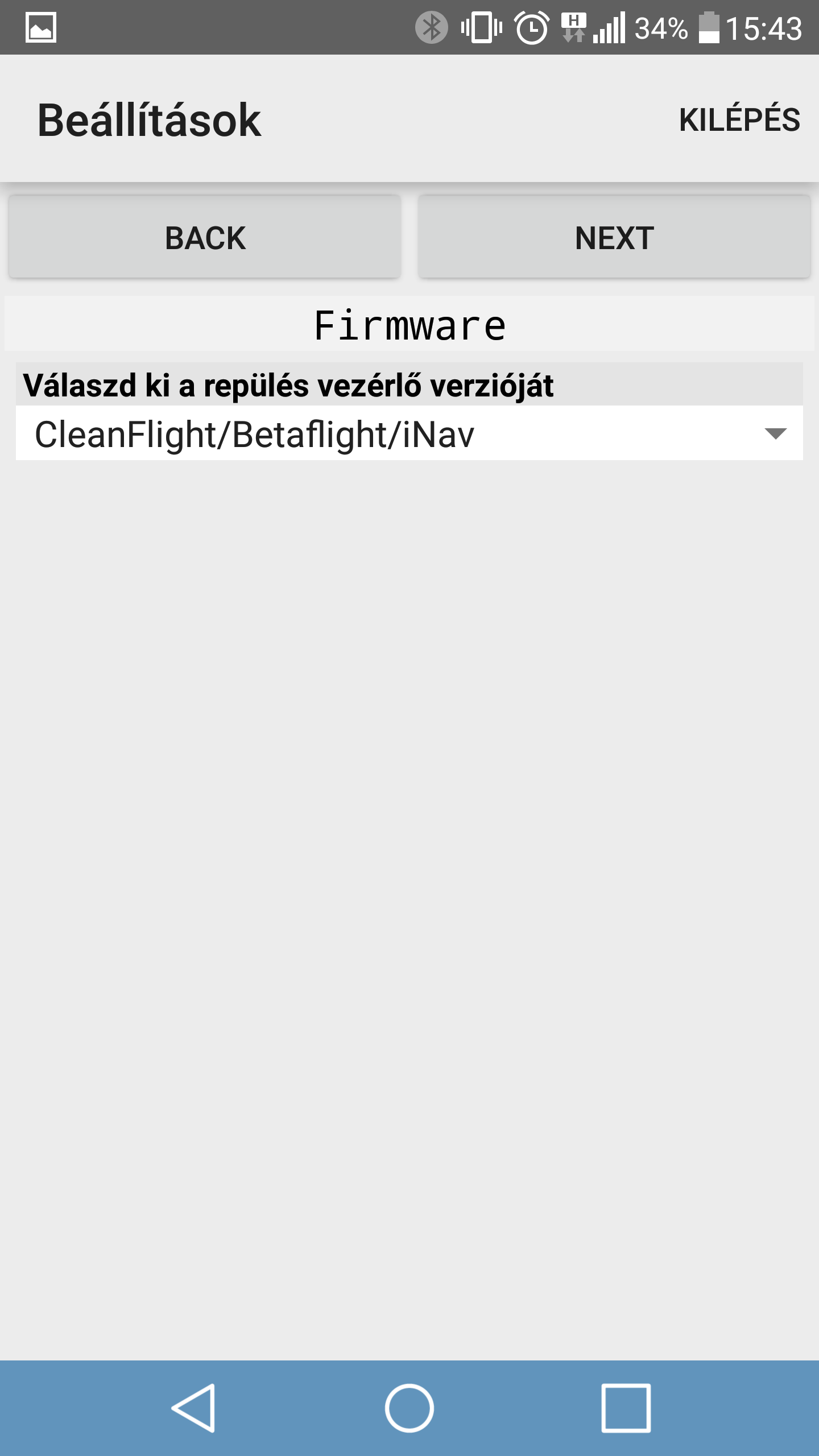
Viszont kedvedre kísérletezhetsz a CleanFlight / BetaFlight / iNAV triumvirátussal és megtanulhatod a PID tuningot és acro repülést. A CleanFlighthoz itt találhatsz egy jó kis összefoglalót.
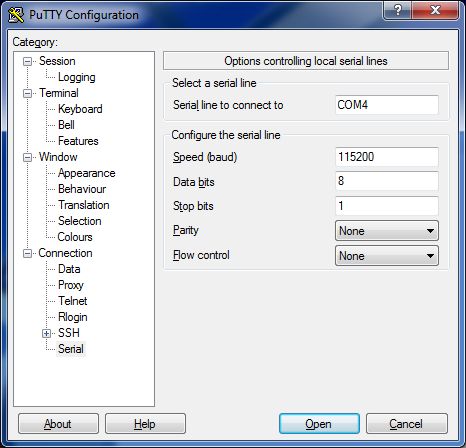
A táv az rajtad múlik. Vagy veszel egy FlySky i6-ot és hozzá egy mikro vevőt (együtt cca 50$) vagy mindjárt egy FrSky Taranis lesz a befutó. Ez típustól függően 130$ - 200$, de szinte örök darab. Viszont a FlySky meg filléres, és a legújabb 10 csatornás firmwarerel nincs jobb ár/érték arányban. Talán csak a picit okosabb iRangeX i6X, de az is csak egy átbrandelt FlySky.

A távhoz vehetsz szimulátor kábelt, vagy csak simán rákötöd a PC-re a trainer porton át és egyből szimulátorozhatsz is. Van egy rakat lehetőséged, akár a mobilod is összekötheted a távirányítóddal. További infóért nézd meg a tx_to_pc_howto tag-el ellátott írásaim. Taranis tulajoknak jó hír, hogy nekik elég egy USB kábel, mivel a távjuk képes joystickként működni.
Ingyenes szimulátorok közül említésre méltóak: FPV Freerider, FPV Freerider Android, FPV Freerider Recharged, DRL Simulator. Fizetősek közül pedig a Liftoff-ot próbáltam és szeretem.
No, én elméletileg valahol itt tartok
Következő lépésnek egy micro brushless gépet javasolok, mint az Emax BabyHawk. A QX80 44g-ot nyom szárazon, a BabyHawk 60-at, így nyugodtan kiviheted a parkba, senkit nem fogsz agyonvágni. Viszont egy brushless gép egy kefés géphez képest egy rakéta. Főleg a függőleges emelkedésben van kakaó, így egy elszabott manőver nem feltétlenül fog becsapódást jelenteni. Ha ezt már jól tereled, jöhetnek a nagyobb és veszélyesebb madarak, nem kell majd félned.
 Emax BabyHawk
Emax BabyHawk
A kis gépekkel veszélytelenségük ellenére parasztkodni nem ajánlott, és készülj fel rá, hogy mindenki úgy fog rád nézni a headsetedben, mint egy ufóra. Pont ezért jobb keresni egy raltíve nyugodtabb környéket, ahol nem kell kiskölyköket és kutyákat kerülgetned, és nem akarja elmondani az unatkozó mami, mi a baj a mai fiatalokkal. Viszont még így is nagyságrendekkel könnyebb repülésre alkalmas területet találni, mintha egy valódi versenygéppel akarnál csapatni. Könnyebben jutsz ki a terepre - > több gyakorlás - > jobb pilóta leszel.
A Tiny QX80 még a létra foka alatt is elfér. :P
Amennyiben acro módban szeretnél röpködni, mint a nagyok, akkor nem ajánlom, hogy egy játékkategóriás gépre aggass FPV vagy WiFi kamerát. Tudom miről beszélek, a stabilizált módok után az acro-t újra kellett tanulnom, és bizony, még mindig eléggé döcögős, valószínű belőlem sem lesz már Charpu.
Charpu meg gyakorlatilag itt tart
... vagy egyből kezdesz egy racerrel, és két hónap szopás után eladod, mert a guta fog csapkodni, de semmi sikerélményed nem lesz. A döntés rajtad áll. ;)
 A bluetooth modul alig feltűnő módon, kékkel jelölve. Mellesleg túl közel van a GPS-hez, de ez egy másik történet.
A bluetooth modul alig feltűnő módon, kékkel jelölve. Mellesleg túl közel van a GPS-hez, de ez egy másik történet.



 A 3S akku merülőben, de a GPS kapcsolat jól áll a KGB projectnél
A 3S akku merülőben, de a GPS kapcsolat jól áll a KGB projectnél













 Hogy lesz ebből mese?
Hogy lesz ebből mese?




 forrás:Banggood.com
forrás:Banggood.com