Bluetooth telmetria Cleanflight alatt
meg Betaflight / Raceflight / iNAV alatt
Szevasztok,
a mostani poszt egy régi adósságom. Már jó ideje megígértem, de én sem tudom miért, mindig elfelejtettem megírni. Most megkapjátok!
 A bluetooth modul alig feltűnő módon, kékkel jelölve. Mellesleg túl közel van a GPS-hez, de ez egy másik történet.
A bluetooth modul alig feltűnő módon, kékkel jelölve. Mellesleg túl közel van a GPS-hez, de ez egy másik történet.
Mint már többször említettem, a Bluetooth telemetriának három fő oka van:
1. Ha behal a gépben a BEC nem sütjük meg a pécénk vagy mobilunk USB portját.
2. Felturbózzuk a PID tuningot, mert nem kell az USB kábellel szórakozni és várni míg a PC vagy mobilunk hajlandó újracsatlakozni.
3. kívülállóknak dicsekedhetünk, hogy milyen okos a drónunk.
BT telemetriához legelterjedtebb a HC-05 és a HC-06 modul. A kettő között az a különbség, hogy a HC-05 képes master és slave módban is működni, míg a HC-06 csak slave módban. Mivel a kopter úgyis slave módban csatlakozik majd a mi master eszközünkhöz (PC, mobil) így elég a HC-06 is. Az alábbiakban a HC-06 beüzemelését taglalom. Aki többet akar tudni a BT master slave viszonyról, ezt olvassa át.
Csatlakozás a HC-06 Bluetooth modulhoz
Cisco / Juniper rendszergazdáknak: standard beállítású soros porton keresztül csatlakozzunk a BT modulhoz, majd ugorjunk a következő pontra
Azoknak, akiknek ez kínai:
Sajnos a HC-06 a dobozból kivéve nem ért szót a kvadkopterünkkel, így be kell állítani pár paramétert. Ehhez szükségünk lesz egy UART linkerre, azaz USB-serial átalakítóra. Minden kockánál kéne, hogy legyen legalább egy, ha nincs pl. innen beszerezhető. Telepítsük a megfelelő UART drivert, ez alapján, ha még nem lenne fent.

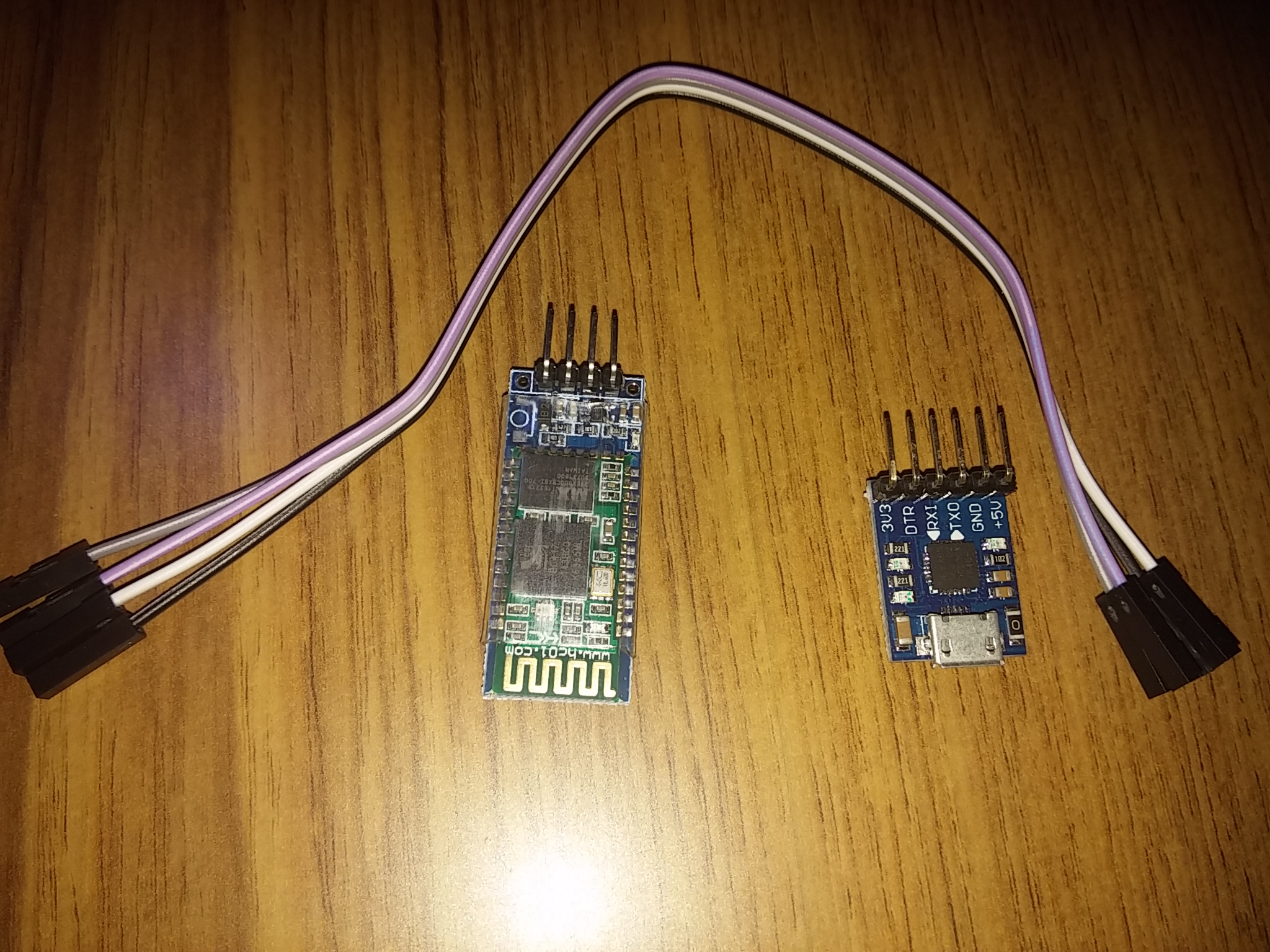
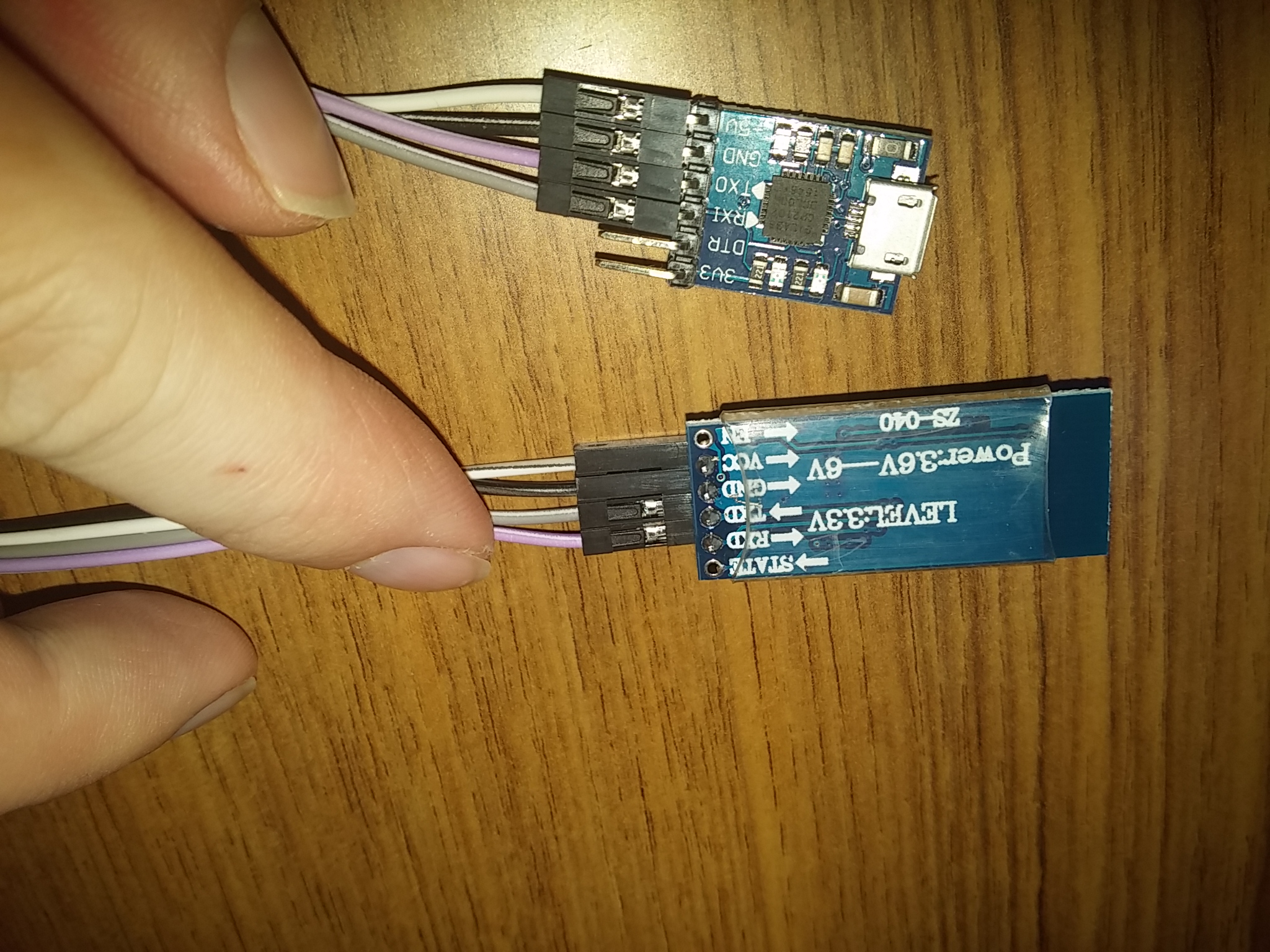
Kössük össze a linkert a BT modullal így:
linker - HC-06
5V VCC - 5V VCC
GND - GND
RX - TX
TX - RX
Telepítsük a putty-t vagy más konzolprogramot, esetleg az Arduino IDE fejlesztőkörnyezetet. A továbbiakban a putty-t fogom használni.
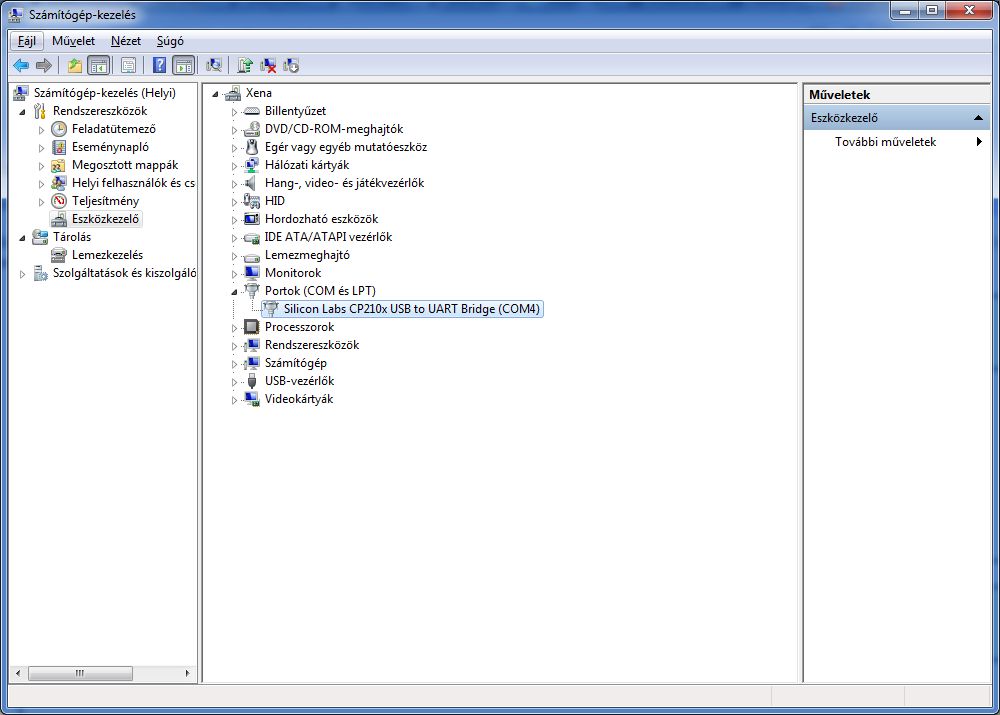
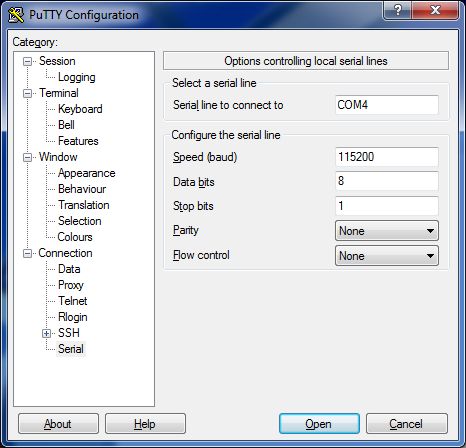
Indítsuk el a Putty-t, majd válasszuk ki a Serial csatlakozást. A Serial line alatt írjuk be azon port számát, amit a driver installálásakor létrehozott a gépünk. Klikkeljünk a Serial mezőbe, majd állítsuk be:
speed(baud) - 9600
data bits - 8
stop bits - 1
parity - None
Itt megsúgom, hogy szinte az összes soros portot használó eszköznek ez az alapbeállítása.


A HC-06 Bluetooth modul konfigolása
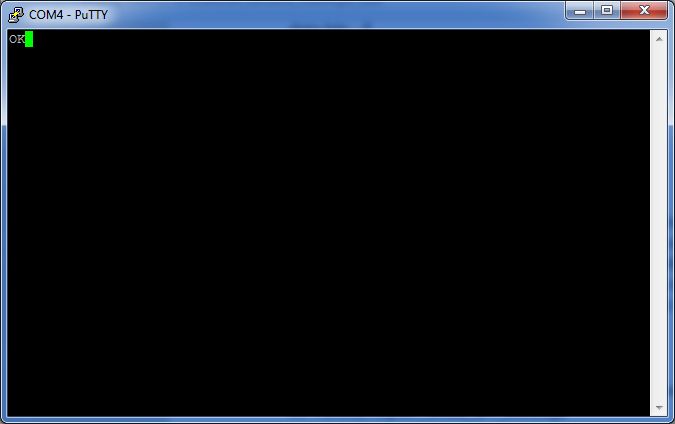
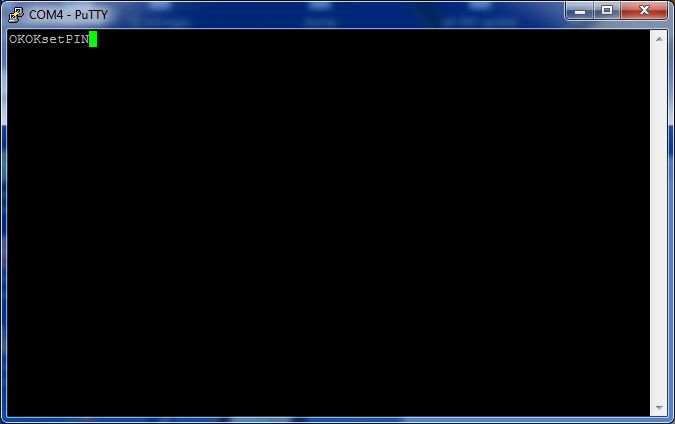
Amikor megnyílt a putty terminálablakja Írjuk be AT - annak kéne megjelenni, hogy OK. Ha nem jelenik meg, ellenőrizzük a baud rate-et, valamint hogy az RX-TX jól csatlakozik-e. Ha nem cseréljük meg őket. Mivel a BT modulnak nagyon gyorsan kéne gépelni, a következő utasításokat inkább írjuk le előre egy szövegfájlba, majd onnan másoljuk ki őket.
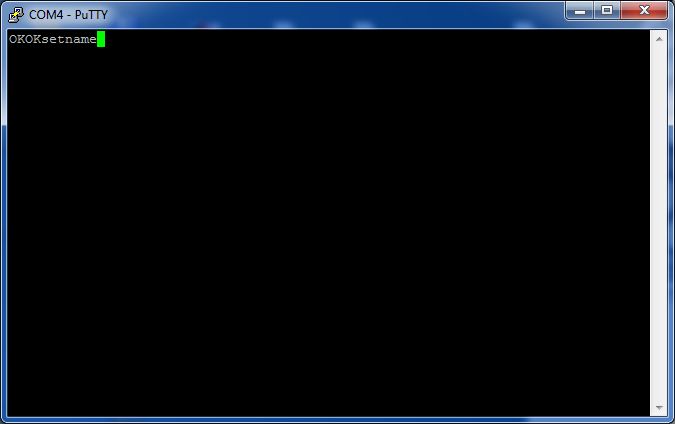
Most a BT modul nevét állítjuk be, ami legyen például Kopter_Geza_BT_Modulja. Ehhez a következőt kell bevinni, így egyben:
AT+NAMEKopter_Geza_BT_Modulja
Most állítsuk át a baud rate-et 115200-ra, ehhez vigyük be:
AT+BAUD8
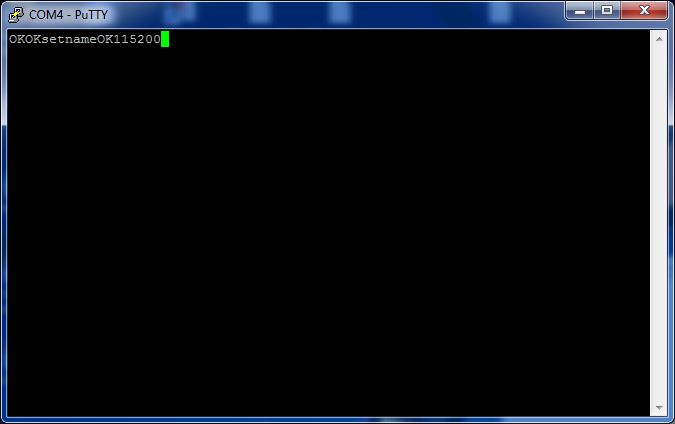
A modul mostmár 115200-on kommunikál, így megszakad a kapcsolat. Kapcsolódjunk újra 115200-as baud rate-el.
Változtatssuk meg a PIN kódot, pl. legyen 1111:
AT+PIN1111
Végül kapcsoljuk ki a BT modul visszajelzését, hogy ne zavarjon bele a soros kommunikációba:
AT+ENABLEIND0
A HC-06 összekötése a kvadkopterrel
Csatlakozzunk a kopetrunkhoz Cleanflight alatt, majd válasszunk ki egy szabad soros portot, állítsuk a sebességét 115200-ra és kapcsoljuk be az "MSP"-t. A képen ezt piros nyíllal jelöltem. A kék nyilat felejtsük el, az ott sincs!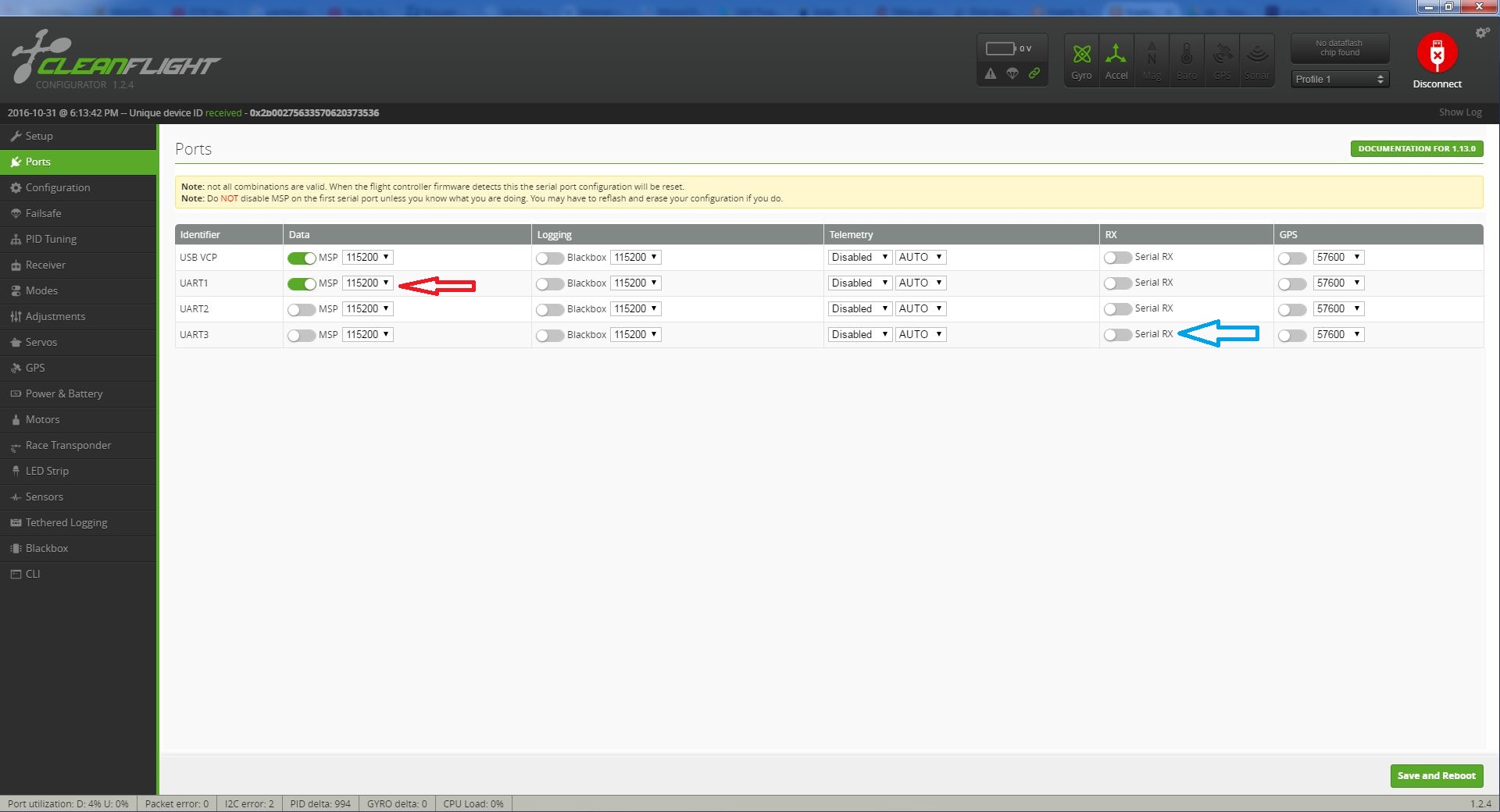
Húzzuk le az USB portot a kopterről és csatlakoztassuk a kiválasztott UART porthoz a BT modulunk. Lényegében készen vagyunk, lehet csatlakozni!
Csatlakozás a kopterhoz Android alól EZ-GUI segítségével
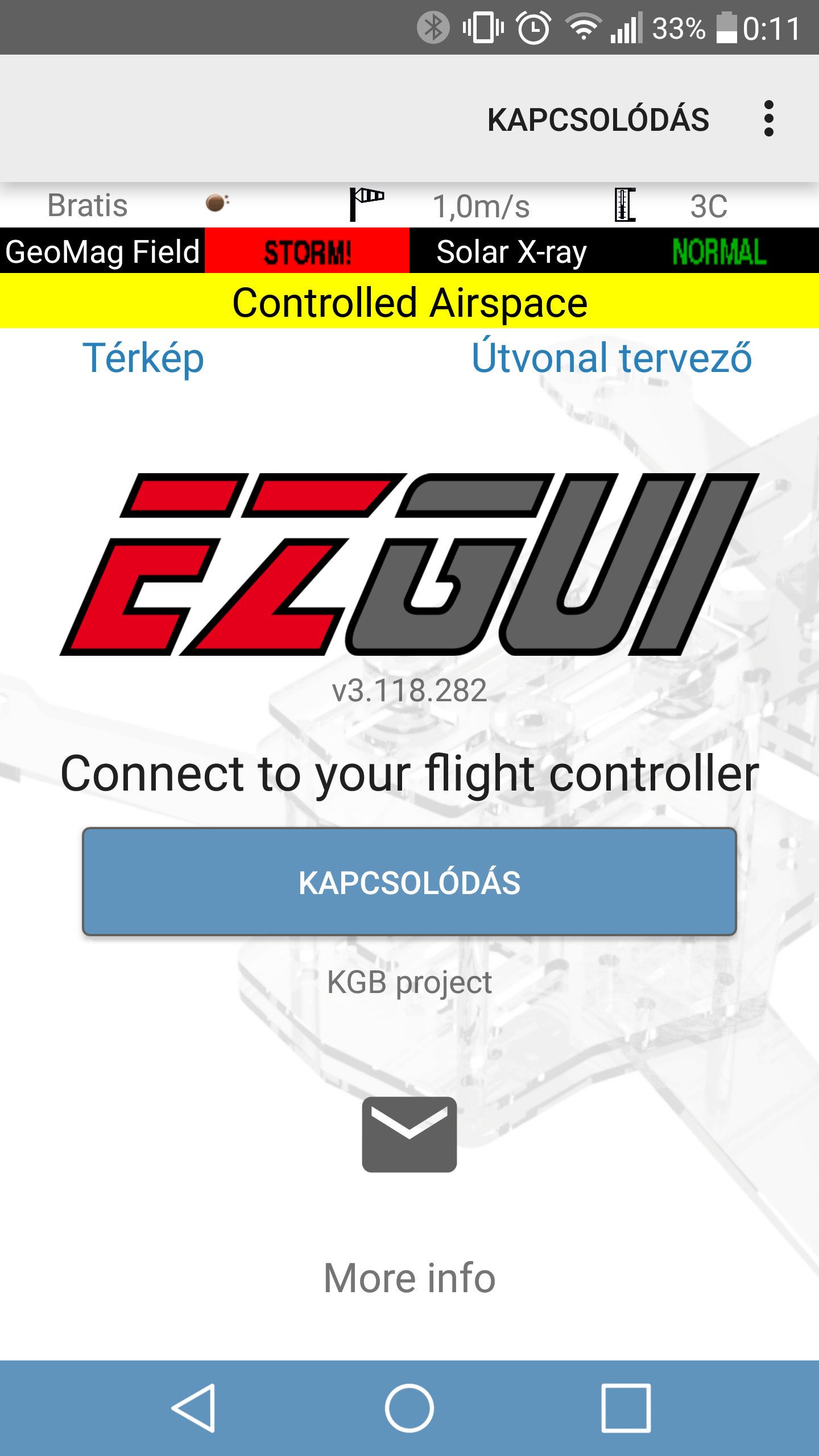
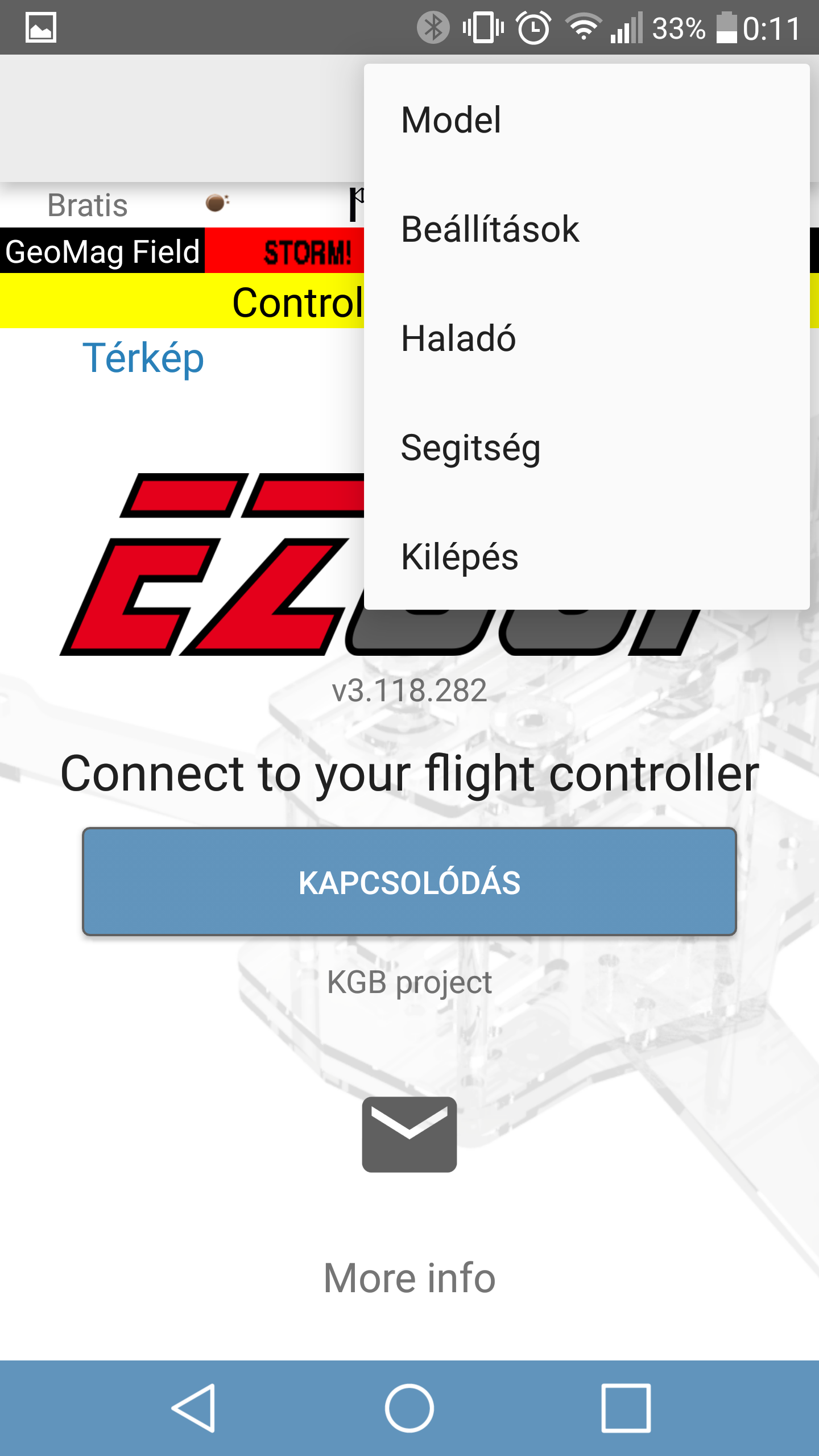
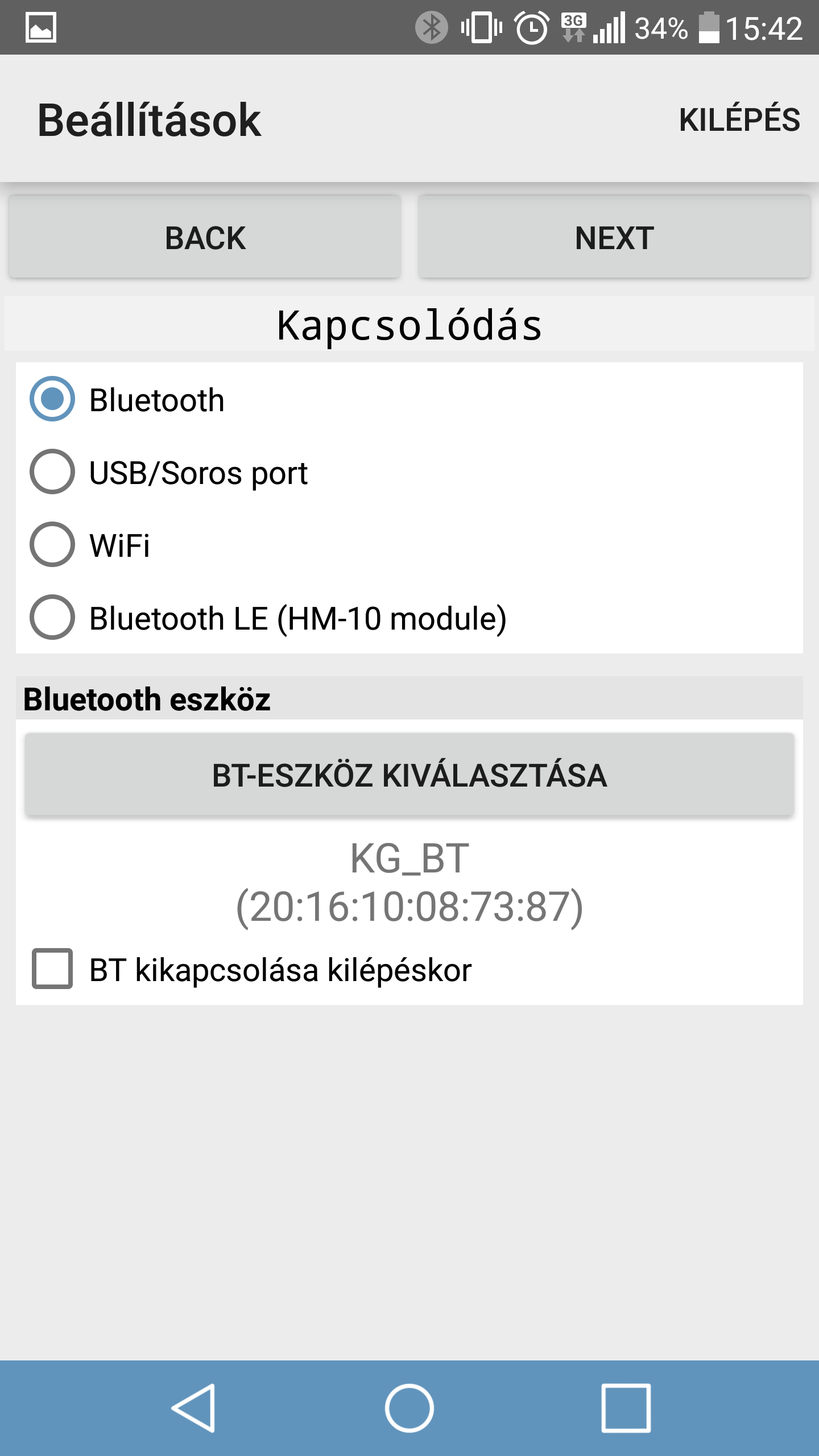
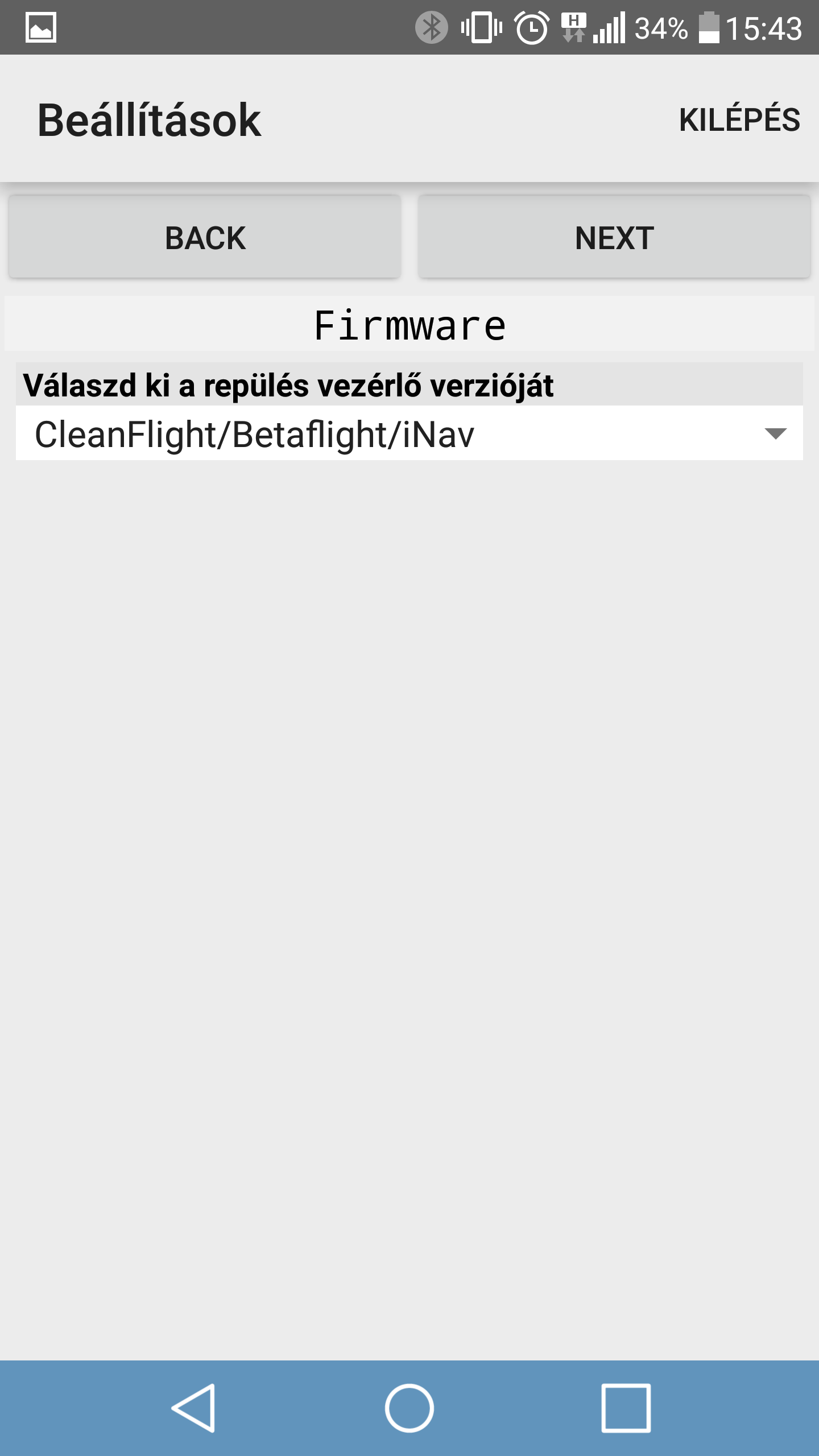
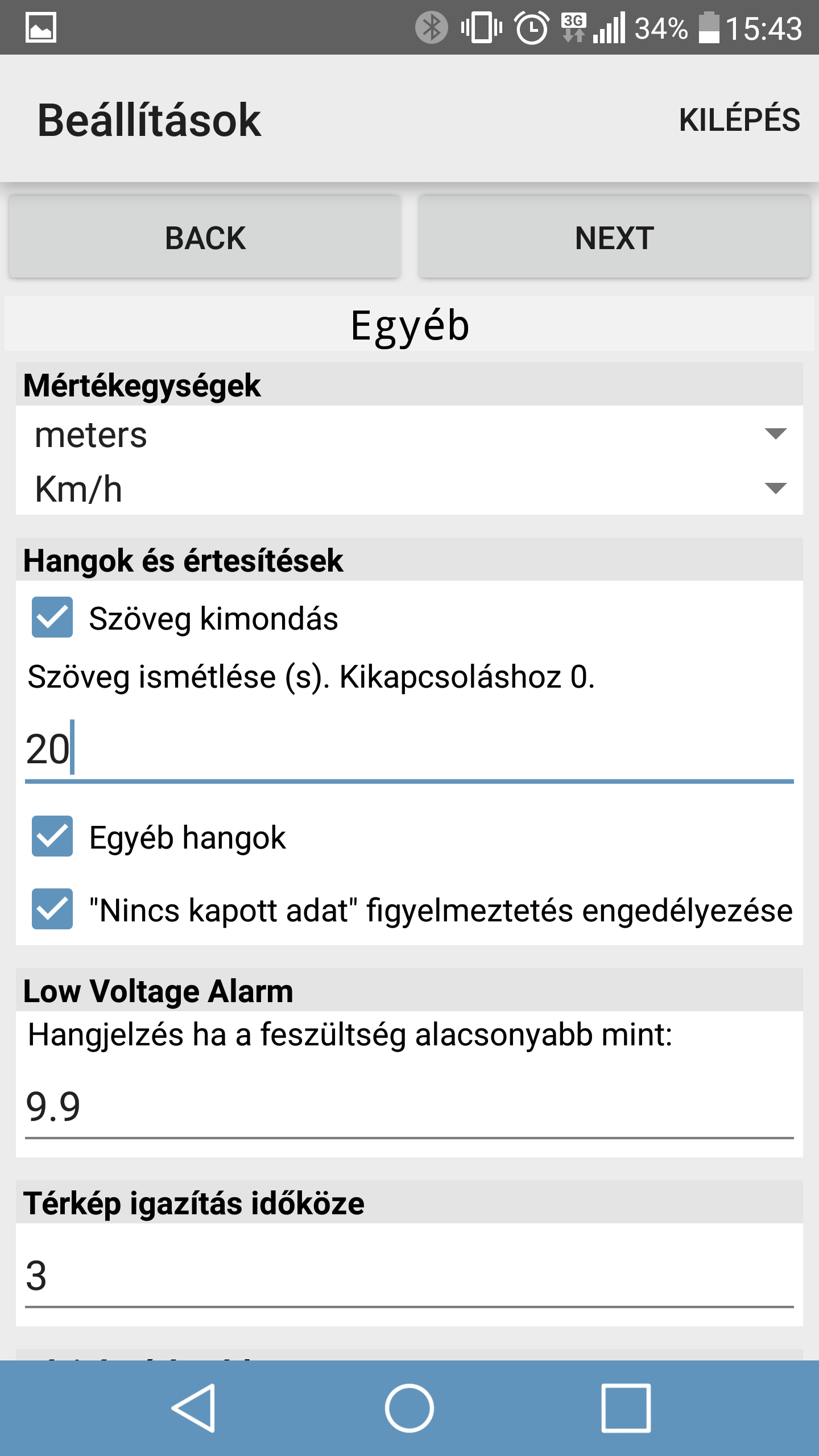
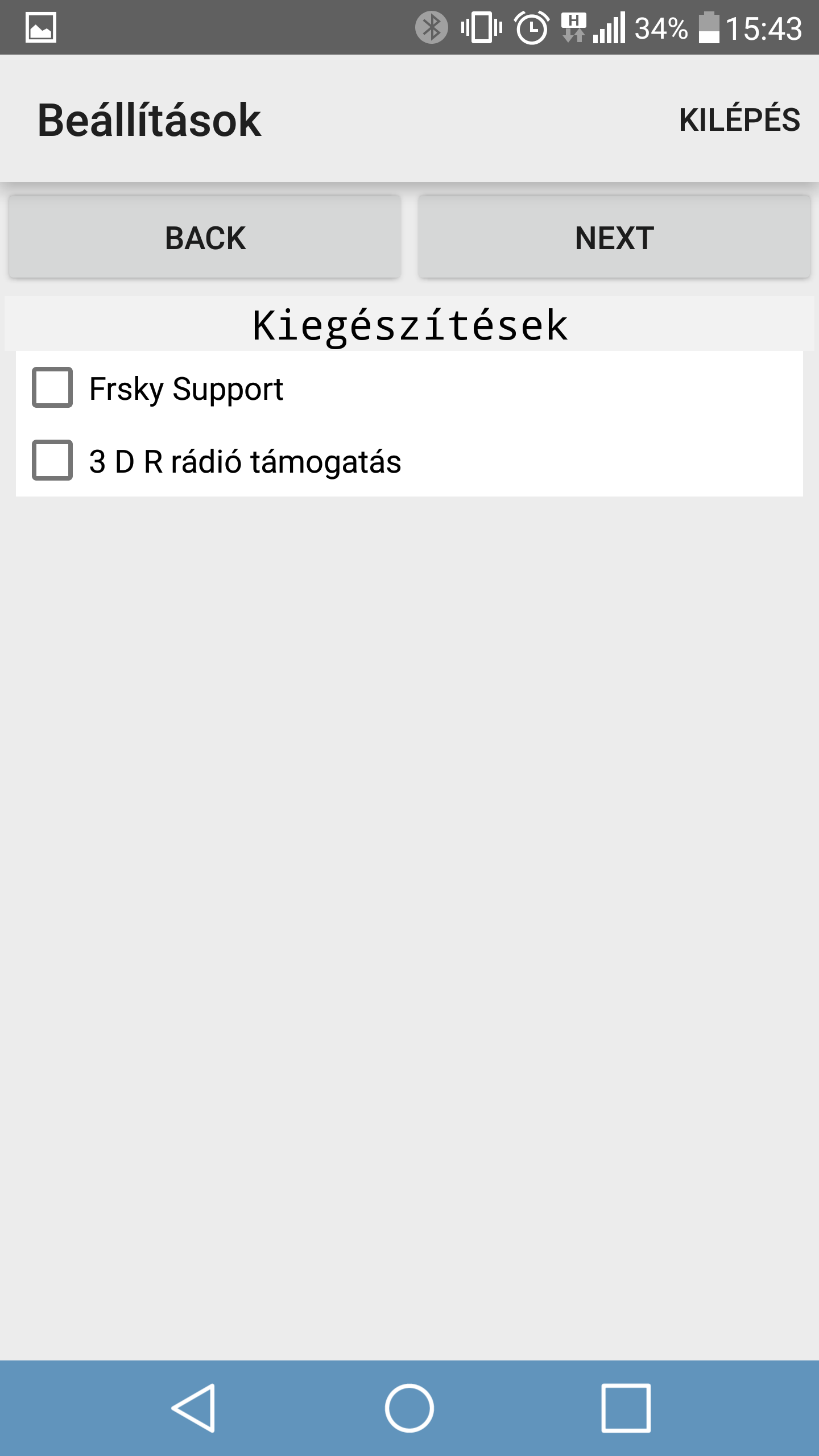
Ha még nincs meg, szerezzük be az EZ-GUI ground station-t a Google Play-ről. Kapcsoljuk be a telefon Bluetooth-ját, párosítsuk a kopterunkkal a telefonunk, majd indítsuk el az EZ-GUI-t. Koppintsunk a jobb felső sarokban lévő menüre, majd válasszuk a Beállítások menüpontot és állítsuk be az alábbi képgaléria alapján.

A BT beállítása után koppintsunk a "Kapcsolódás" gombra. A sikeres kapcsolódást egy kedves női hang adja tudtunkra, méghozzá magyarul!
 A 3S akku merülőben, de a GPS kapcsolat jól áll a KGB projectnél
A 3S akku merülőben, de a GPS kapcsolat jól áll a KGB projectnél
Amennyiben PC-ről akakrunk csatlakozni, hozzunk létre egy virtuális Bluetooth soros portot, majd válasszuk ki Cleanflight alatt és csatlakozzunk. Ezután ugyanúgy konfigolhatjuk a kopterünk, mintha USB kábelen csatlakoznánk.
És lényegében készen vagyunk, indulhat a PID tuning vagy a menőzés! Amennyiben megragadott az írás, lájkolj facebookon vagy youtubeon. ;)