
The KGB project - kezdetek
Teljesen autonóm repülésre képes versenydrón építése
Szevasztok!
Úgy döntöttem, hogy régi jó szokásomat felrúgva nem a kész gép mellől tudósítok, mivel egy jó festményhez hasonlóan egy drón sosem lesz kész, mindig alakít rajta valamit a művész / építő.
Hát akkor vérmérséklettől függően csapjunk bele a lecsóba, fingjunk bele a nullás lisztbe vagy csak egyszerűen kezdjünk bele.
A KGB project (Kopter Geza's Blackhawk project) egy autonóm repülésre is képes versenydrón létrehozását tűzte ki célul a lehető legköltséghatékonyabban a már meglévő 280-as madaramból, ami egy Emax Nighthawk 280 pro. A kamera, a videóadó és a váz ebből a gépből származik. A kamera CMOS létére elég jó képet biztosít, sőt alkonyatkor is használható, a videóadó meg a 250mW-os teljesítménye ellenére eléggé combos hatótávval rendelkezik, cca 5-600m. A váz eléggé jó szolgálatot teljesített első szárnycsapkodásaimnál, mikor is nyélgázzal csaptam neki a focikapunak, de meg sem kottyant neki.
 A váz és videódonor egy EMAX NightHawk 280 pro
A váz és videódonor egy EMAX NightHawk 280 pro
A váz és videó / első donorról bővebben
A NightHawkról azt kell tudni, hogy a legalsó lapjába integrálták a repvezérlőt és az ESC-eket. Ez utóbbiak csak sajnos 12A-osak és hat colos propokkal nem ajánlatos 14,8V-os, azaz 4S akkut használni. Miután sikeresen kiégettem az alaplapot 4S akkuval és 6 colos propokkal, döntöttem úgy, hogy nem lépek vissza 3S-re. A 4S egyszerűen túl nagy élvezeti faktorral bír. Meg aztán a NH280-ba inetgrált Naze32 vezérlőt is agyzsibbasztóan lebutították - csak egy soros portot vezettek ki a kettőből, kihagyták a magasságszenzort, viszont berakták az iránytűt, de olyan közelre az ESC-ekhez, hogy maga a gyártó sem ajánlotta használni. Az I2C portot meg szintén cseszték kivezetni, nehogy saját magnetométert vagy barométert akaszthasson rá a parasztja.
 A megmakkant alaplap
A megmakkant alaplap
Az agy és elektronika / második donor
Repülésvezérlő és ESC donornak a második, elbontásra vett Falcon 180-at választottam. A Banggood szinte mindig akciózza, sacc/kb 60-70 dolcsiért. Most EAARF kupon kóddal a 180 ARF 61,59 dollár. Ha nem fogja meg a finánc, anyagár alatt juthatunk hozzá 4X20A oneshot képes ESC-hez (4x9$), 6DOF SP F3-hoz (20$), 4 db 2204 2300kv motorhoz (4X7$) valamint egy 12V / 5V PDB laphoz (5$) a 14$-os vázat meg akár el is adhatjuk, mondjuk rá nekem pont jól jött tartaléknak a másik 180-as Falconomhoz. :D
 Az elbontott drón is ilyen volt. Nyugi a képen szereplőnek propellere sem görbült
Az elbontott drón is ilyen volt. Nyugi a képen szereplőnek propellere sem görbült
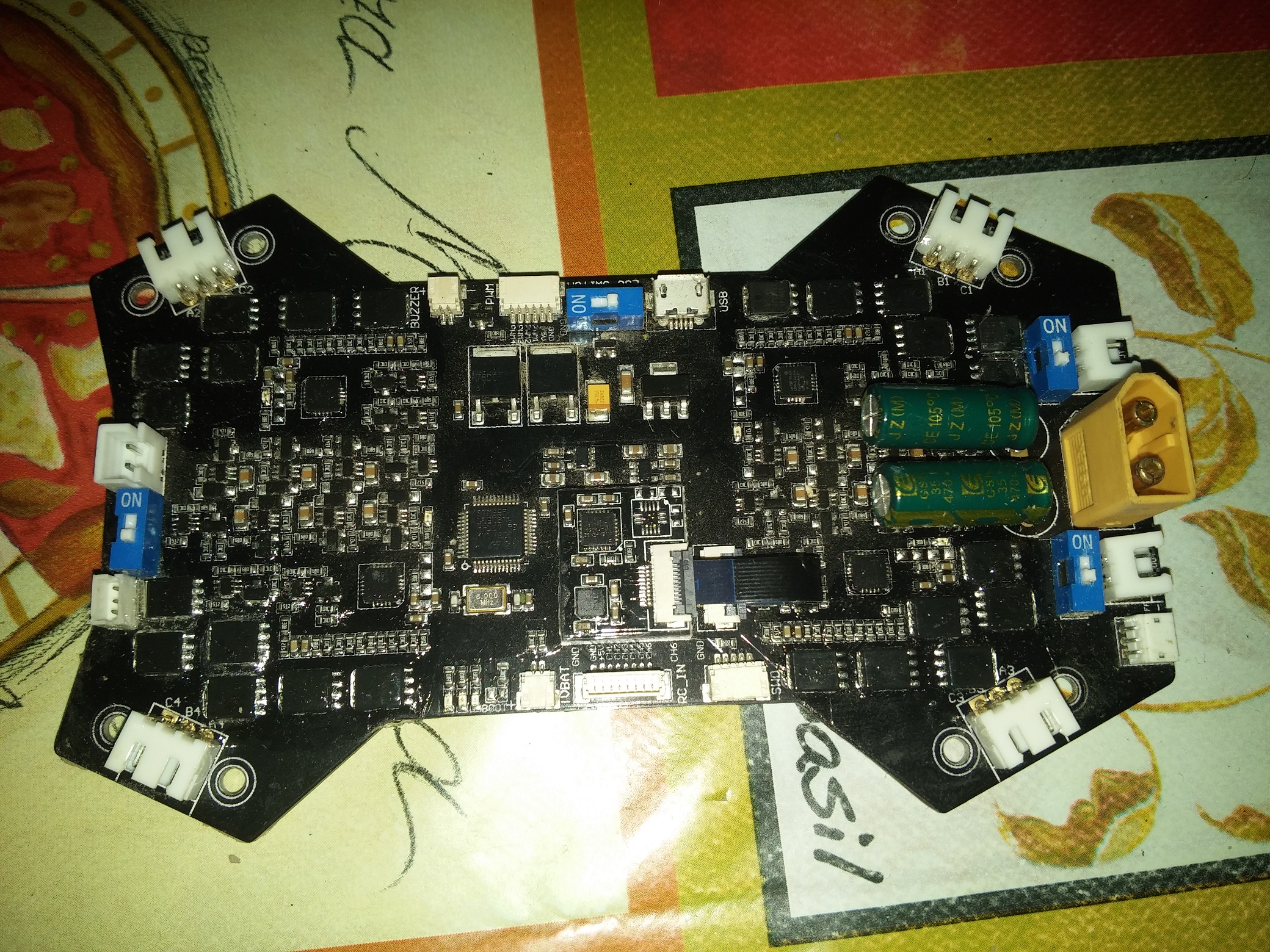
Eredetileg a kedvenc micro F3-am és egy külön PDB-t terveztem beépíteni, de meglepődve tapasztaltam, hogy a Falcon 180 PDB-je egy az egyben beépíthető az NH280 vázba, és így az ESC / motor vezetékek is pont megfelelően hosszúak voltak. Repvezérlőnek meghagytam Falcon 180 teljes méretű, ám 6DOF SP F3 vezérlőjét, ami gyárilag kapcsolódik a PDB-hez egy kábelköteggel, így ezzel sem kellett foglalkoznom, csak elforgattam 90 fokkal jobbra, hogy oldalról hozzáférjek az USB, UART és I2C portokhoz. Az egész műtét egy délután alatt kész volt.

Az NH280 alaplapjára azért is haragudtam, mert hiába volt bene egy 32 bites STM32F1 processzor, jelvesztésnél simán lezuhant BaseFlight alatt, CleanFlightban meg Failsafe címszó alatt csak azt lehetett neki megadni, hogy süllyedjen egy ideig, aztán essen le. Az iNAV fejlesztői pont ezt a hótbuta viselkedést elégelték meg, így ha van GPS, barométer és iránytű, jelvesztésnél simán hazatalál a masina, sirály!

Miért elég a 6DOF vezérlő?
A neten való kutakodásom során kiderült, hogy a repvezérlőbe integrált iránytű semmit sem ér navigációnál. Ugyanis a vezérlőt általában a PDB fölé helyezik, a nagy áramok mágneses tere pedig bezavar az iránytűnek. Az iránytű a barométerrel egyetemben azonban nem soros hanem I2C portra csatlakozik. Ez a port olyan furcsa állat, hogy minden eszközt ugyan arra a portra kell kötni párhuzamosan. Ha van két hasonló eszközünk, mint két azonos típusú iránytűnk, ezek ugyanazt az azonosítót fogják használni, és mivel ugyanazokra az SDL/SCA portokra csatlakoznak, a vezérlőnek fingja sincs, hogyan válassza szét a két érzékelő jelét. Tehát, ha van egy 10DOF vezérlőnk és külső iránytűt akarunk használni, akkor bizony ki kell iktatni a vezérlőre integrált iránytűt. Olcsó lapoknál el kell vágni a magnetométer rézvezetékét a repülésvezérlőn, drága lapoknál erre egy kapcsoló szolgál, de ilyennel én még nem találkoztam. Lehet közre játszik az is, hogy az ilyen lapok jellemzően 80+ dollárba fájnak.
Navigálni nem akarunk?
Dehogynem! Ehhez pedig szükségem volt GPS-re, magnetométerre és barométerre.
Az első kettőt megoldottam egy magnetométerrel kombinált Ublox 7 GPS-el. Erről azt érdemes tudni, hogy 6 dugasza van. Kettő a +5V táp / GND-nek, kettő az egyik UART port RX/TX vezetékpárjának ami a GPS-hez vezet, kettő pedig az I2C port SDL/SCL vezetékpárjának ami a beépített magnetométerhez van kötve. A táplálást és az UART csatlakozást az SP F3 vezérlő hátán lévő UART3 portról oldottam meg, a magnetométert pedig rádugtam az egyetlen I2C portra. Az SP F3 az APM-ekhez képest sokkal kevesebb adatot fogad a GPS-től, viszont szerencsére képes magától konfigolni a GPS-ünk. Persze ehhez előbb az UBLOX u-center programjával 57600kbps-ra kell állítani a GPS-t, különben szórakozhatunk a csigalassú 9600kbps-al. Amennyiben a GPS-ünk nem akarna szót fogadni, megpróbálkozhatunk a manuális konfiggal, amihez itt van egy jó leírás.
Barométernek általában BMP280-at vagy MS5611-et szoktak használni. Az előbbi pontatlanabb, de filléres, az utóbbi drágább, de pontosabb. A vicc az, hogy beszámolók szerint ugyanaz a vezérlő még a gagyibb magasságszenzorral is jobban tartja a magasságot iNAV alatt mint CleanFLight alatt a pontosabbal. :D
OSD, telemetria?
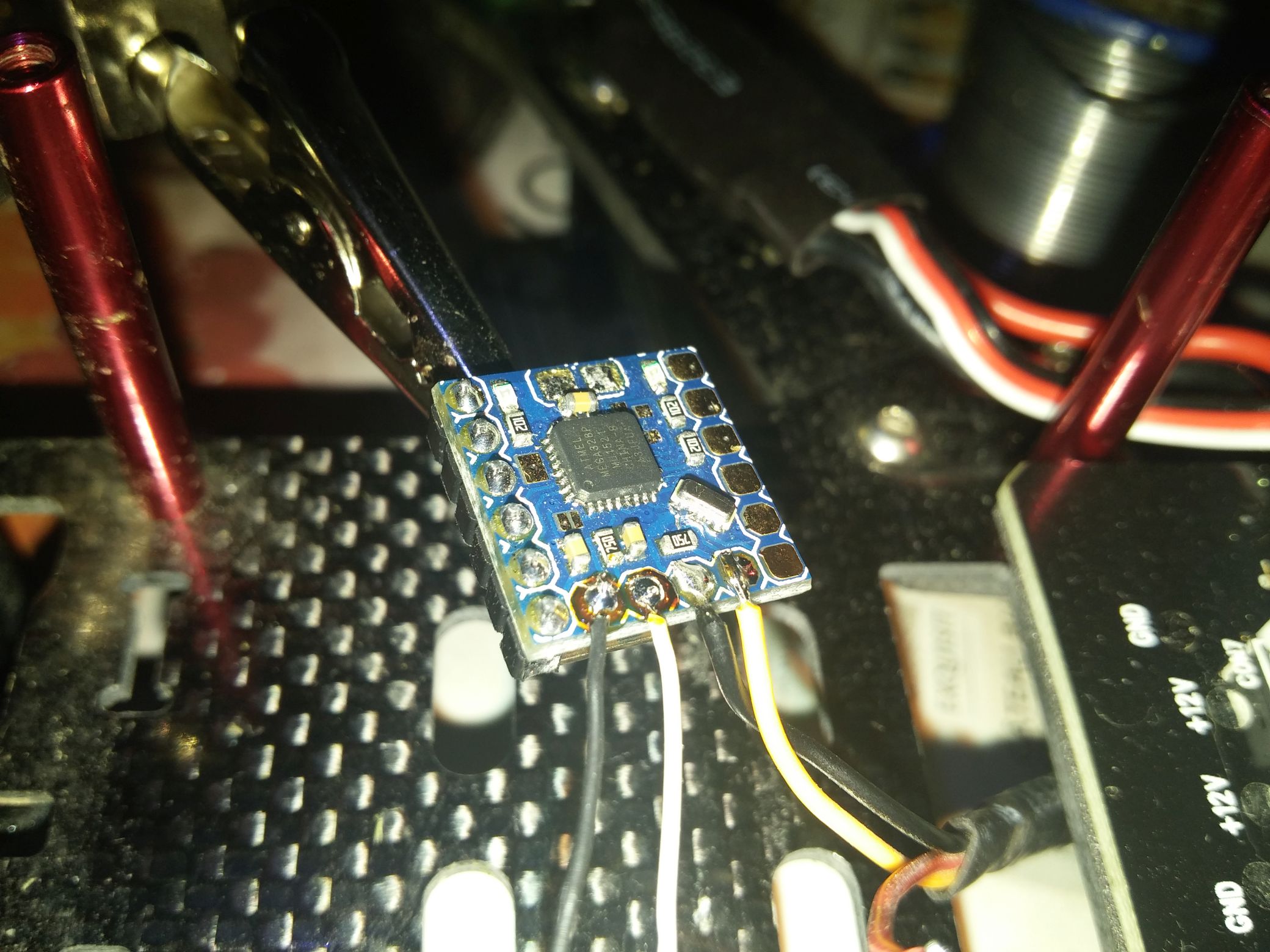
OSD-ből a jól ismert minim OSD-t használom. Pici, csak 5V-os ága van, így nem hajlamos megsülni, nem megy el a kép nagyobb gázfröccsnnél, mi kell még? Az UART2-ről etetem, megy mint az ágyba vizelés. ZsoleszFPV részletes leírása elérhető itt és a második része pedig itt.
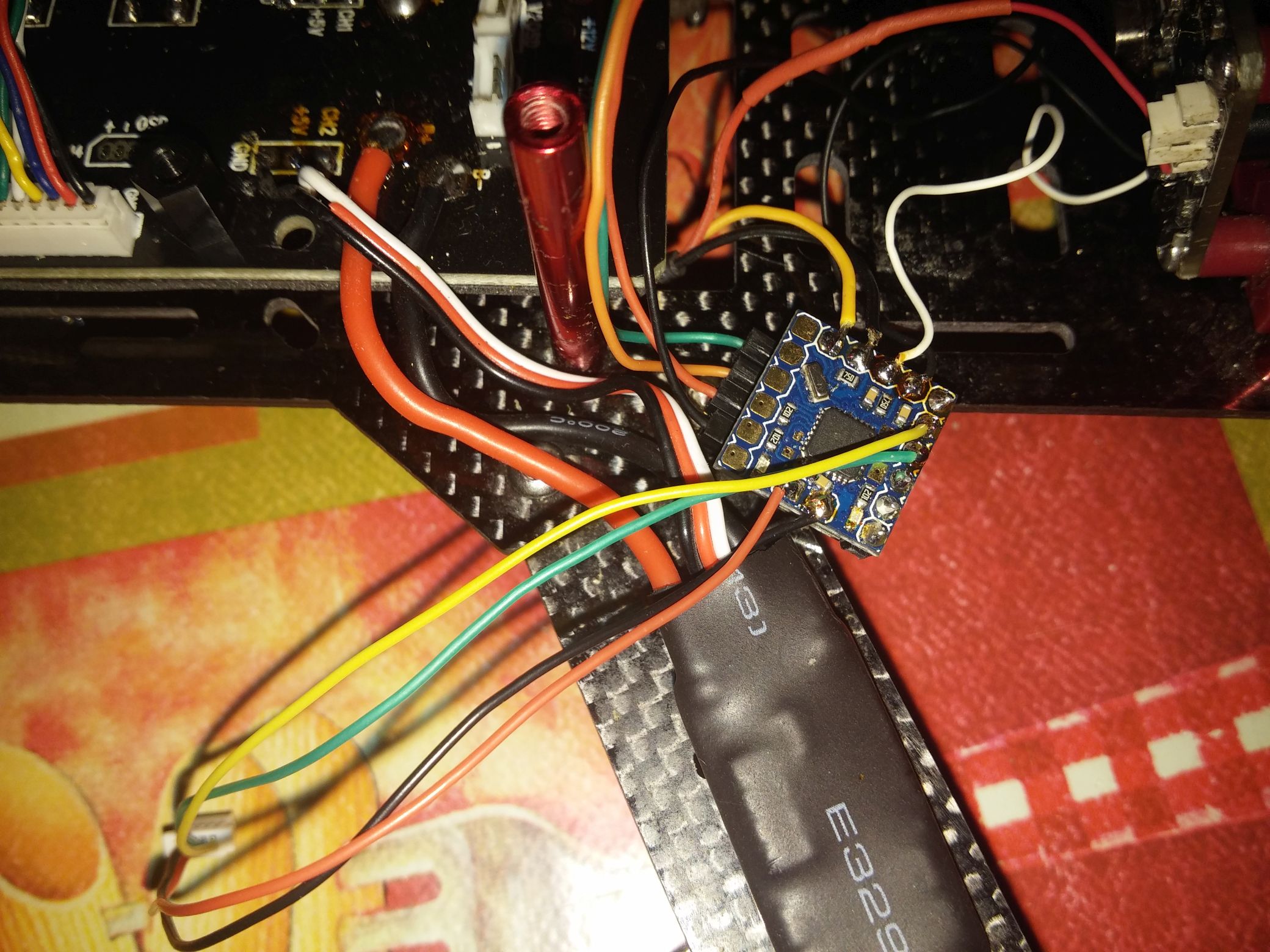

Telemetriánál egyelőre maradtam a jól ismert HC-05 BT modul mellett ami a telefonomon futó EZ-GUI-hoz csatlakozik Bluetoothon keresztül. Bár a hatótávja csak 20 méter, szó szerint felturbózza a PID tuningot, nem kell kábelekkel és laptoppal bohóckodni a semmi közepén, cserébe elkérte az utolsó üres, azaz UART1 portot. Mellesleg olyan könnyű és gyors megoldásról van szó, hogy nem értem, miért nem írtam még róla cikket. :D
Viszont van egy nagyágyúm is, méghozzá a Wi-Fi telemetria. Ehhez az ESP8266 modult vettem meg, de még nem sikerült vele zöld ágra vergődnöm. Elméletileg 200m-ig jó kéne, hogy legyen, majd meglátom.
Fontos tudni, hogy a repvezérlő USB portja szintén az UART1-re csatlakozik, ezért mindenképp le kell húzni az UART1-hez csatlakozott eszközt, mert összeakad az USB porttal! Esetemben ez azt jelenti, hogyha kábelen keresztül kapcsolódok a PC-hez mindenképp le kell húznom a BT / WiFi telemetria modult.
Távirányító és vevő
Mint a legtöbb projektemhez, ehhez is a FlySky i6 távomat használtam és a már unalomig ismert iA6b vevőt. Ez utóbbit PPM-en keresztül kötöttem a repvezérlőre, hogy megspóroljak egy soros, azaz UART portot.


Mennyi az annyi?
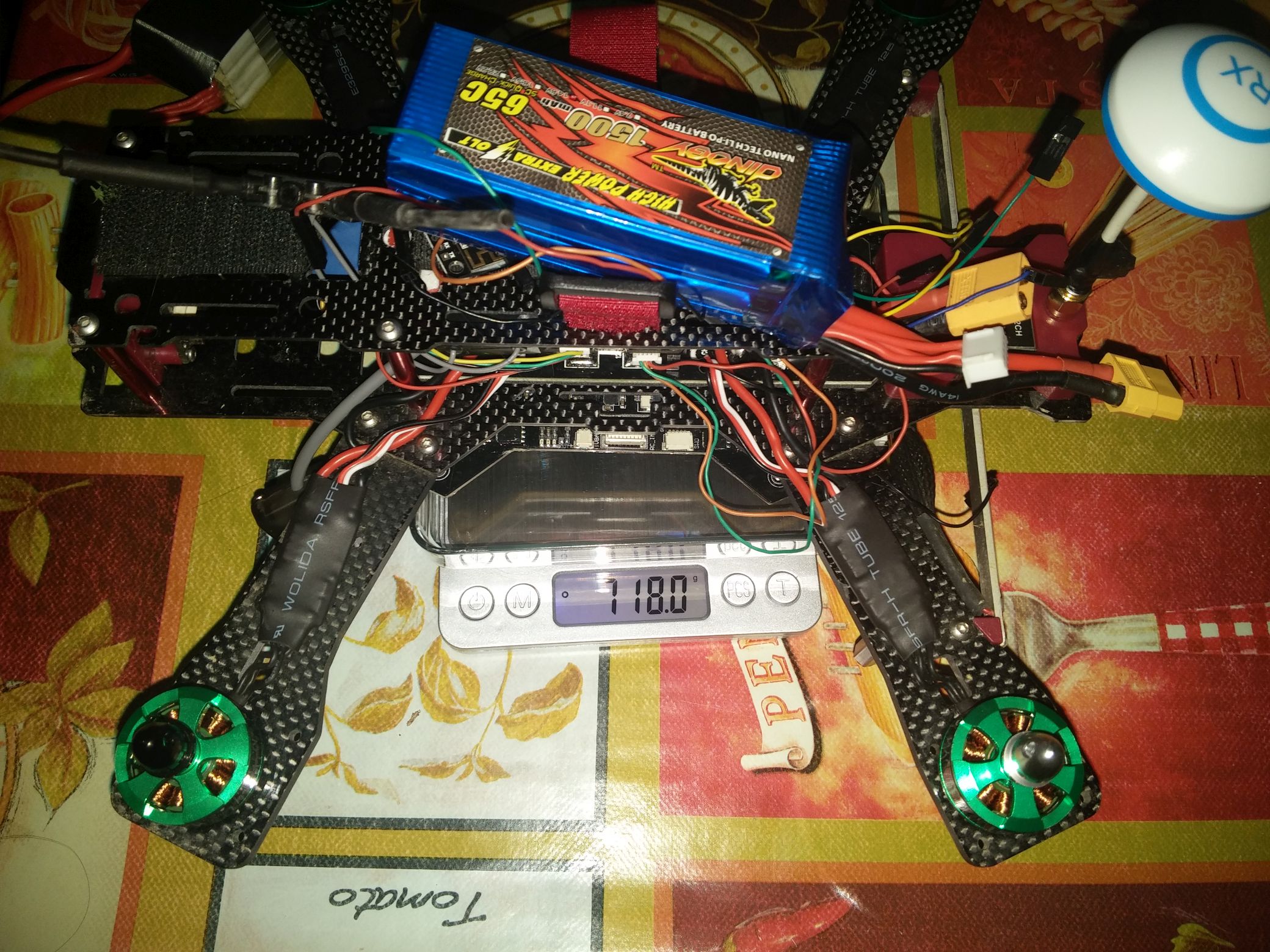
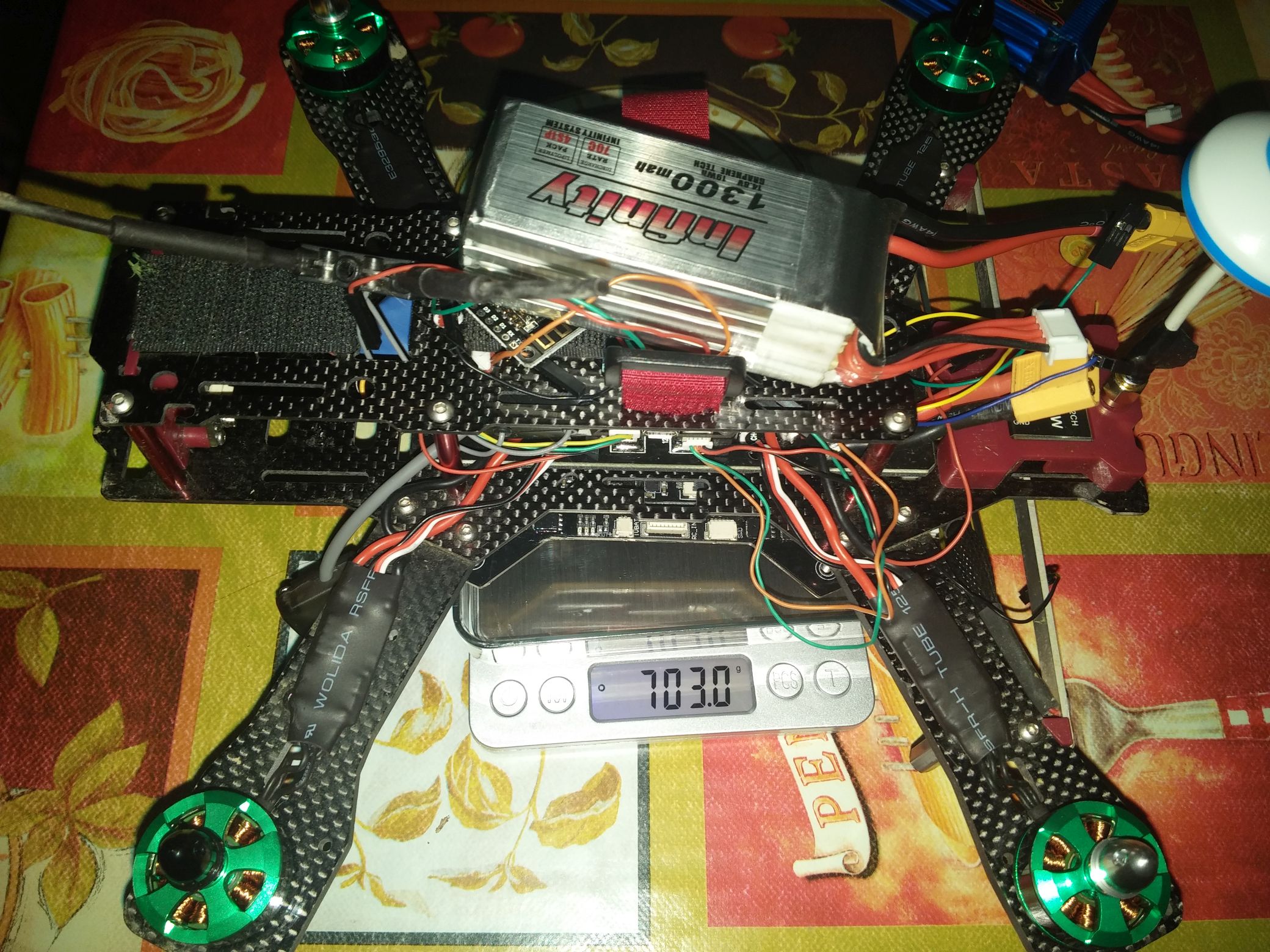
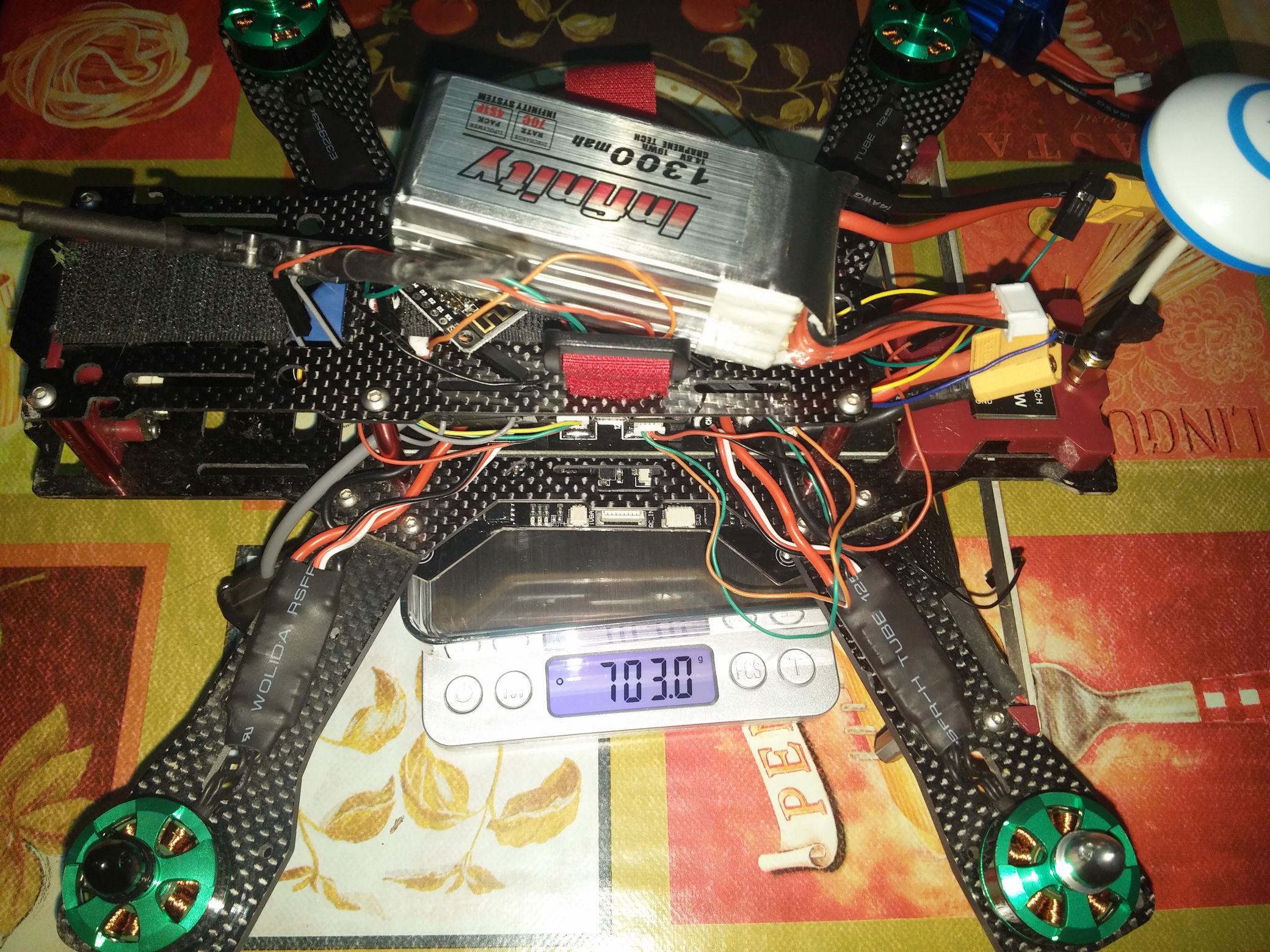
A gép üresen 553g-ot nyom (egyelőre a pár g-os barométer nélkül,) 1500-as 4S Dinogy akkuval 718g-ot, míg az 1300-as 4S Infinity Graphene akkuval 703g-t kóstál. Mellesleg ez utóbbi akku a személyes kedvencem. Nagyon megy vele minden gépem és pont bele fér a Falcon 180-ba is. :D
 Alternatív RTH :)
Alternatív RTH :)
Nincs más hátra, mint felcsapni a propokat, ki a mezőre és belőni / tesztelni a PID-eket és a Return To Home (RTH) funkciót.
És egyelőre itt ér véget a mese, de jelentkezem, amint beleakadok valami érdekes vagy váratlan fejleménybe.
Ha tetszett a bejegyzés dobj egy lájkot YouTubeon vagy Facebookon! Köszi!




