
7. PID és rate-ek beállítása
CleanFlight gyorstalpaló almenü
A PID beállítása önmagában megér egy egész cikkfolyamot. Még szerencse, hogy ZsoleszFPV már megírta helyettem. Innen is köszönöm! Az én első szerencsétlenkedésemről itt olvashattok.
A PID reszelés nem újoncoknak való vidék. A CF/BF/iNAV fejlesztői viszont arra törekednek, hogy a repülésvezérlők már gyári PID értékekkel is kielégítő repülési élményt nyújtsanak kezdőknek . Az F1 procival szerelt lapok, mint a Naze32, már gond nélkül használhatók gyári állapotban kóricálásra. Az F3 lapokkal, még itt-ott szükséges némi tuning. Szerencsére a Tiny QX80 eléggé jól repül gyári értékekkel.
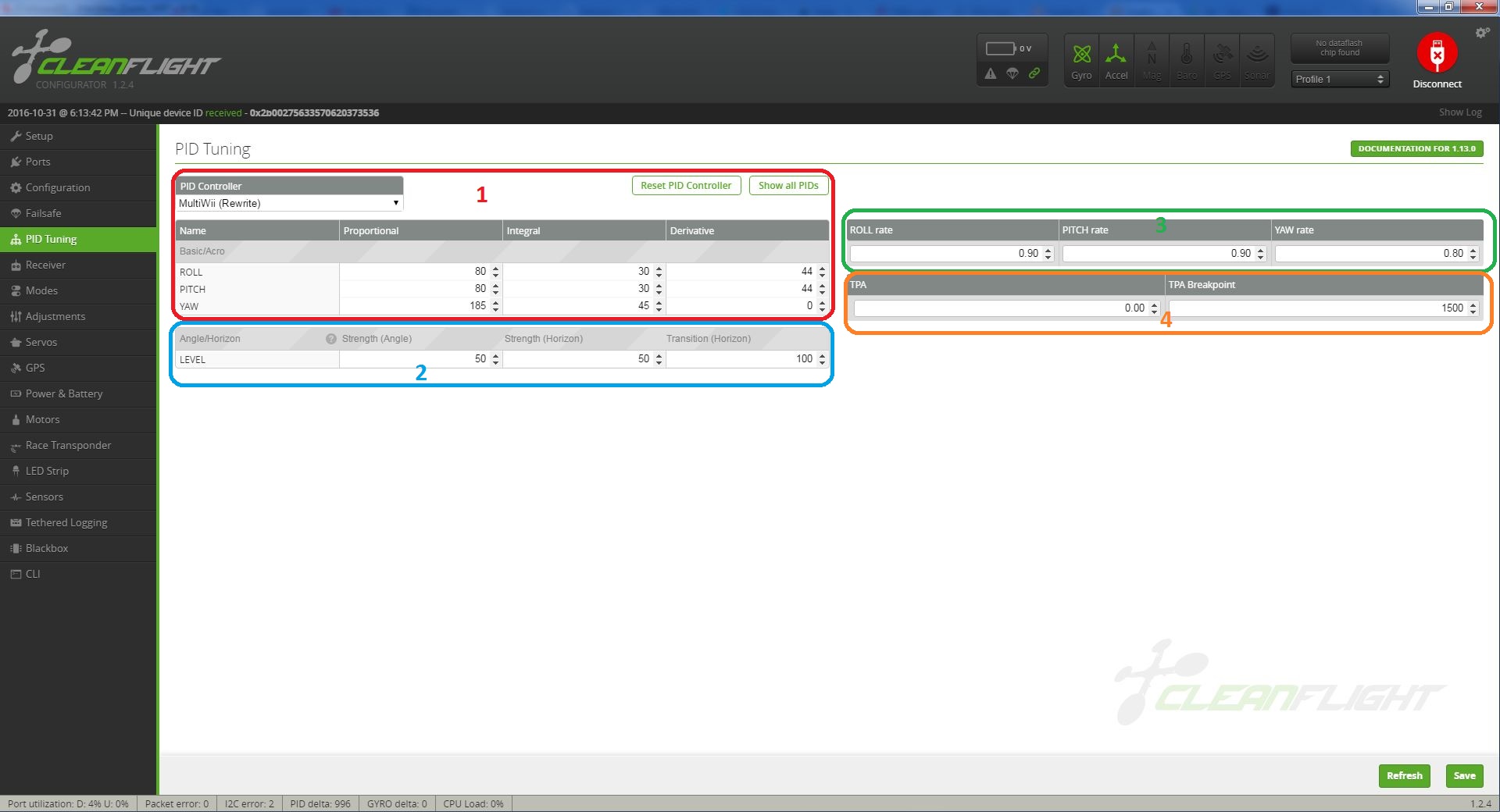
Tehát PID Tuning fülön a piros 1-el jelölt mezőt magunktól ne állítgassuk, csak akkor, ha tudjuk mit csinálunk. Ellenben semmi nem akadályoz meg abban, hogy tapasztalt pilóták PID értékeit lenyúljuk.
Ha mások PID értékeit akarjuk használni, semmi gond, csak vigyázni kell, hogy ugyanazt a PID controllert használjuk mint ő, és ugyanazt a CF verziót, mert nem egyszer előfordult, hogy az újabb verzióban már átírták a PID controllert.
Tehát, az én PID-jeimet nyugodtan használhatod a QX80-adra vagy hasonló méretű gépedre CF 1.2.4 alatt MultiWii PID controllerrel.
A kék 2-vel jelölt mezőben az értékeket akkor állítsuk, ha gépünk nagyon lustán vízszintezi ki magát stabilizált módokban, azaz a stick elengedése után lassan veszi fel a vízszintes helyzetet, mozgásnál sodródik. Minél nagyobb az érték, annál nagyobb vehemenciával próbálja felvenni a vízszintes helyzetet. QX80-nál nekem az 50 ideális mind Angle, mind Horizon módban. Túl magas értéknél a gép túlkompenzálhat.
A Horizon mód átmenet az Angle és az Acro módok között. Legyen előre annyi elég, a Horizon transition ezek viszonyát határozza meg. 100- sok Angle, kevés Acro; 0 - kevés Angle, sok Acro. Bővebben a módokról itt, a transitionról meg a CF oldalán.
A zöld három akkor jön jól, ha a gép túl kicsi vagy nagy szögben tér ki a pöckök mozgatására, illetve lassan fordul a függőleges tengelye körül. Hogy mi, melyik irány, azt az alábbi kép szemlélteti. Értelem szerűen minél nagyonn érték, annál nagyobb kitérés.

Horizon módban nagyon nehéz volt bukfencet vetni a géppel, így én mind a pitch, mind a roll értékeket felraktam 90-re. Mostmár nincs ilyennel gond. :)
A narancs négy-el jelölt mező akkor jön jól, ha bizonyos gáz felett a gép instabillá válik. Itt megadhatunk egy csillapítási értéket egy bizonyos gázszint felett. Nálam 0, mivel a Tiny QX80-nál nem láttam anomáliát magas gázállásnál.
Vissza a főmenübe.




