Az ólomveréb
dupla akku, dupla élvezet?
Aki követi a Facebook oldalam, az tudhat róla, hogy mostanában egy eléggé eszement projekttel foglalatoskodtam, az Ólomverébbel. :D

Hogy mi is az az ólomveréb?
Az ólomveréb lényeggében egy kétcellás, azaz 2S akkuval hajtott zsebrészer, versenyszúnyog vagy izompacsirta. A QX80 kicsit kezdett már lassúnak érződni, az Emax BabyHawk meg ki tudja mikor jön ki, így muszáj volt építenem egy durvább porbafingót.
Alapnak adottak voltak az elbontott MJX X600-am kétcellás, azaz 7,4V-os akkujai és 8520-as motorjai, így a gombhoz kabátot elv alapján már csak megfelelő vázat, FPV kamerát és repvezérlőt kellett találnom.
A Kingkong Smart100 elég szimpatikus váznak tűnt, így rendeltem egyet. Repvezérlőre nem akartam sokat költeni, így csak egy sima Naze32-ős Eachine/Realacc-ot vettem. A portok száma nem gond, úgy sem akartam telemetriát meg blackboxot futtatni, hét dolcsiért meg szinte ajándék, és hat motornak van ESC, így elméletileg nem gond, ha egy-kettő kiég, mert átmapolhatom őket. Kamerából meg épp a Realacc TX48 volt akciós, így ő is a kosaramban landolt. :D

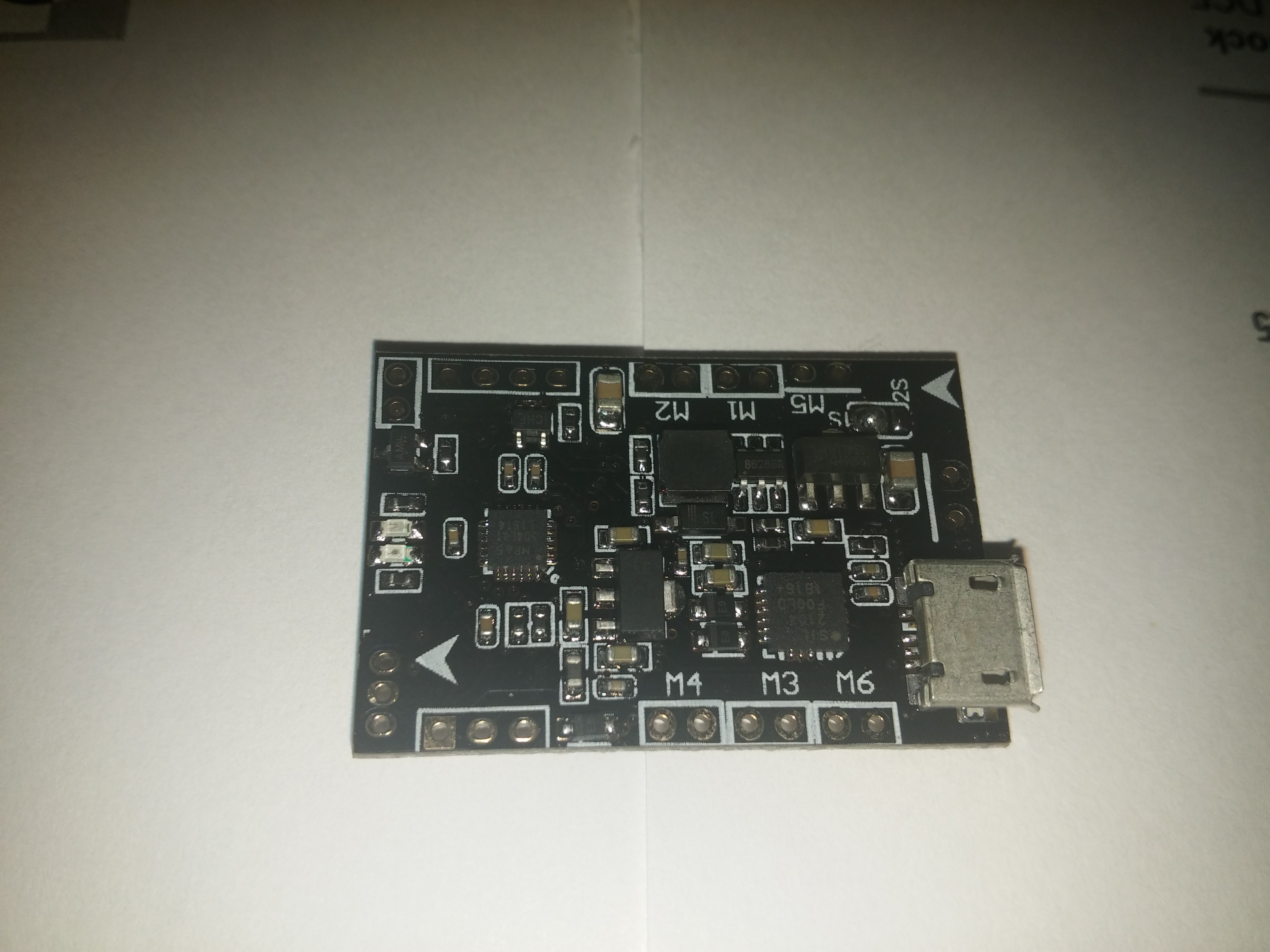


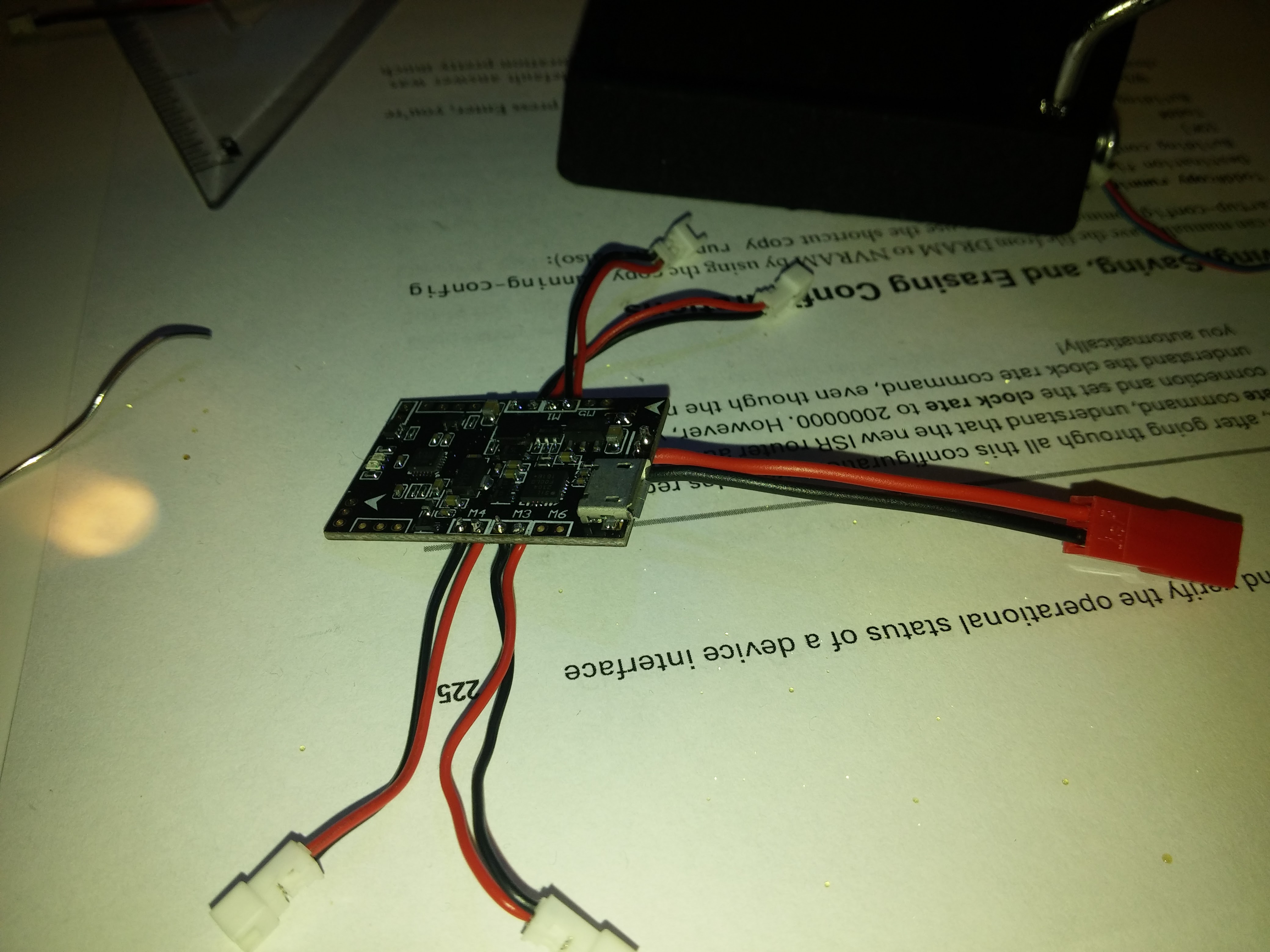
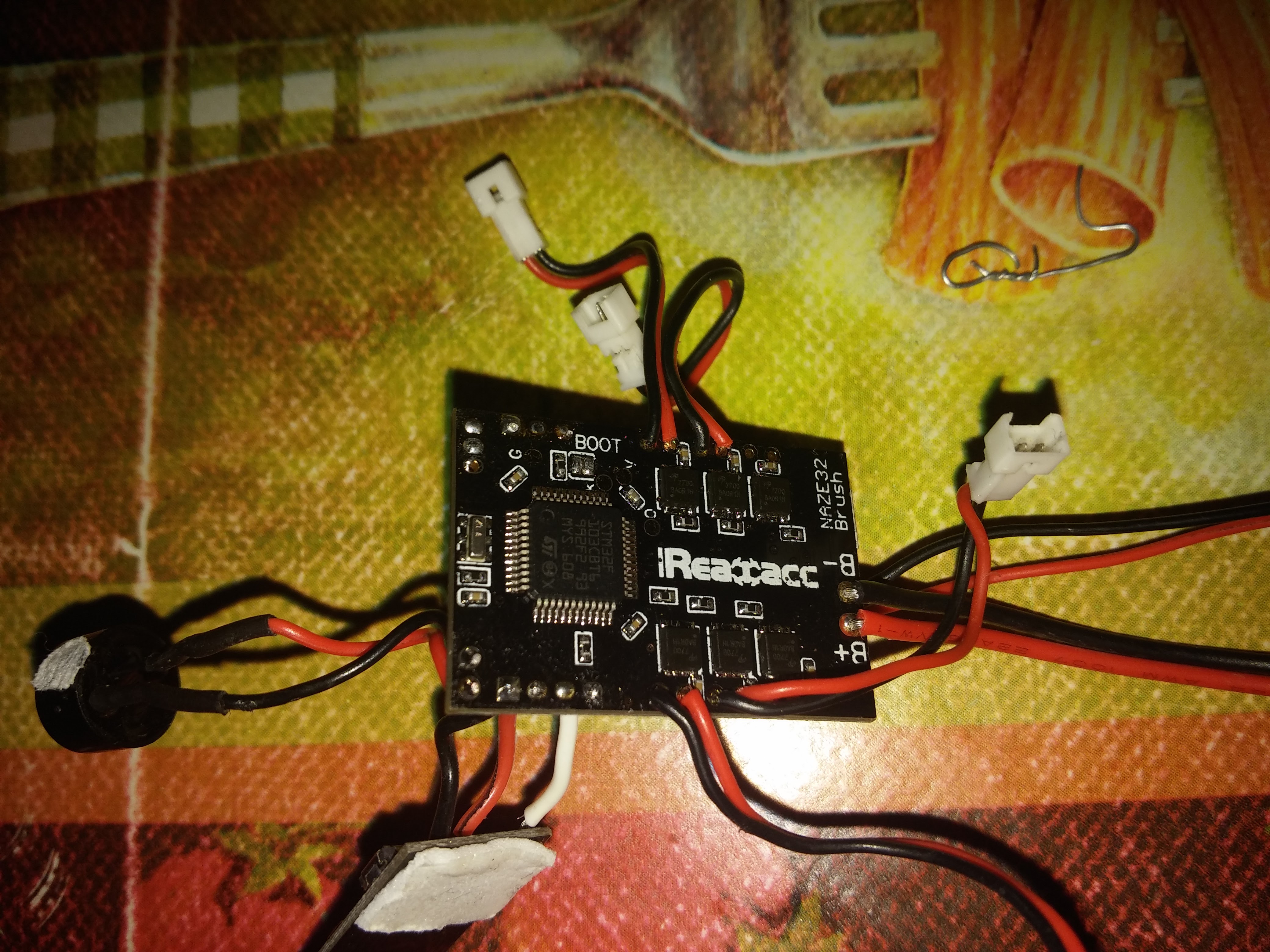
Minden megjött, jöhetett az építés. Kiderült, hogy a repvezérlőn alul vannak a kefés motorokat hajtó FET-ek SMD szűrőkondenzátorai és az MJX X600 motorjai sem érnek el az alaplaphoz, így a motor forraszpontjaihoz alulról 1,25mm-es JST hosszabítókat vezettem, amiket felüről forrasztottam be.
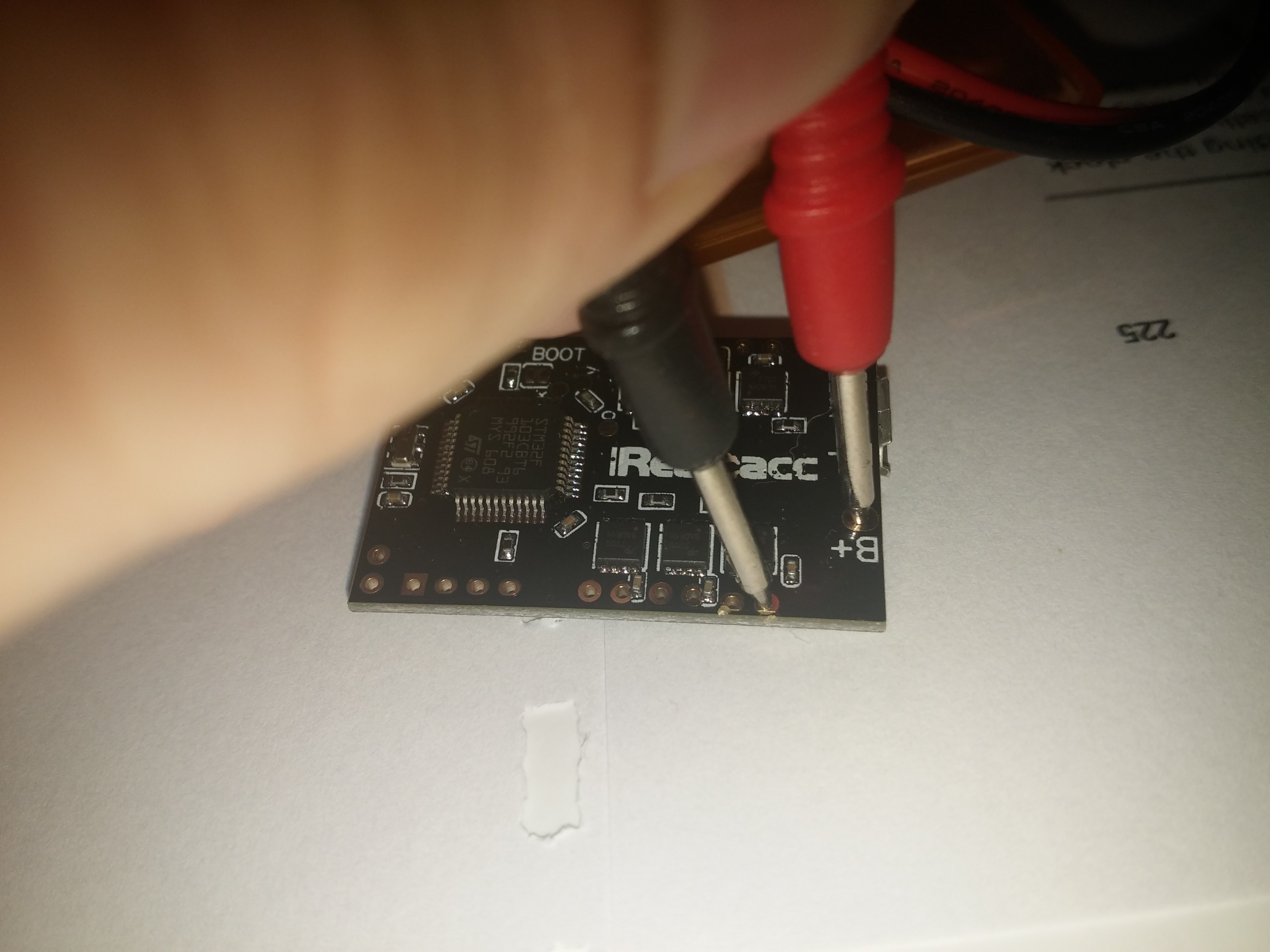
Ha nincs kedvetek próba szerencse alapján kideríteni, hogy az alaplapon melyik a kefés motorok pozitív forraszpontja, akkor fogjatok egy multimétert, és keressétek meg, melyik forraszpontnak van 0-hoz közeli ellenállása az akku pozitív forraszpontjához képest.
Logikusan a másik forraszpontra lesz vezetve a kefés motor negatív vezetéke.
Mivel kiderült, hogy a kamera 1,5 centis a kopter távtartói meg 12mm-esek, így azokat is cseréltem. Vevőnek ekkor még az éppen felszabadult Dasmikro PPM vevőt használtam. Gondoltam, hogyha derékszögben felállítom az antennáját, legalább kielégítő hatótávot kapok. Nem kaptam, de erről majd később, előbb jöjjön a kamerával való szívás!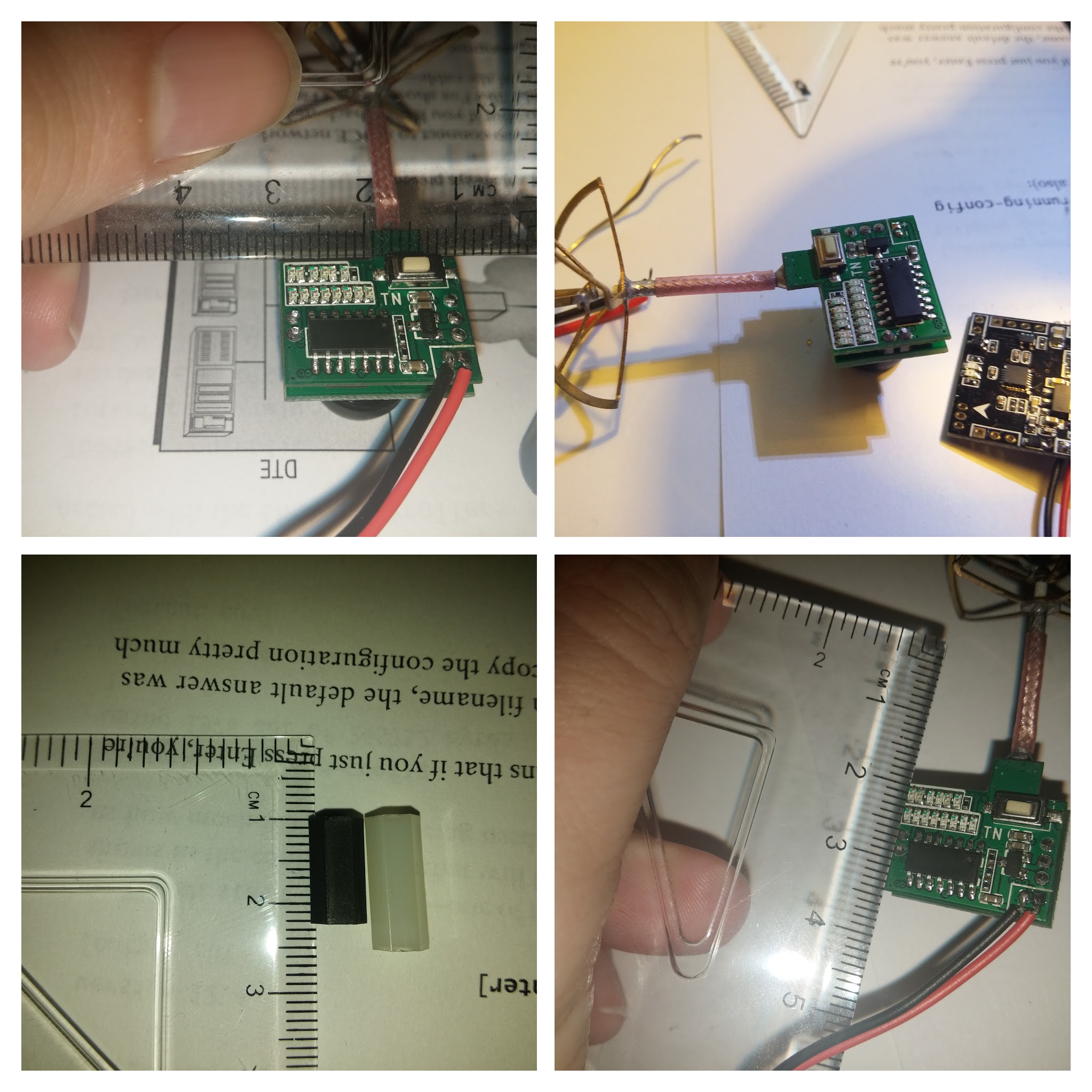
A kamerával való szívás
Tehát fogtam a kamerát, ami az alaplapja szerint 3,7-10V-os tartomyányban működőképes, és rákötöttem a kopter 8,4V-ra töltött akkujára. A kamera 22 másodperc alatt megdöglött. Nem voltam boldog.
Najó, bevallom, úgy anyáztam, hogy még a szomszédban is csuklottak. :D Megreklamáltam a Banggood-nál, de ott álltam kamera nélkül. Így fogtam magam, lekaptam a QX80-ról a KingKong Q25 FPV kamerát és kerítettem egy step-down konvertert, amit 4,2V-ra állítottam be a tetején lévő trimmerrel, nehogy megsüljön ez a kamera is.
Mivel a Q25 videóadója és a buck converter csak a masina hátán fért el, így ekkor még a projekt "Quasimodo" munkacímen futott.
A Dasmikro vevő a rádióhullámokra nem vevő
Kivittem terepre, de hiába tájoltam akármilyen szögben a Dasmikro vevőm antennáját, bizony kutyagumit sem ért. Betettem az iRangeX FS-RX2A-t, és láss csodát, miután összehaverkodott az alaplappal, fák mögött 100m fölött kezdett akadozni a jel, ami ilyen mikrovevőtől kimondottan jó érték. Mivel ennél a vevőnél csak serial módban van failsafe, így ezzel elvesztettem az egyetlen rendelkezésre álló soros portom, de üsse kő, úgyse kő.

Új projectnév
Mivel az FS-RX2A vevő elég pici, így végre a buck converter lekerülhetett a kopter hátáról a közepébe. Mivel a kopter már nem volt elég púpos, de elég testes maradt, így adta magát az Ólomveréb.

De az élet az iRangeX 2A vevővel sem játék és mese
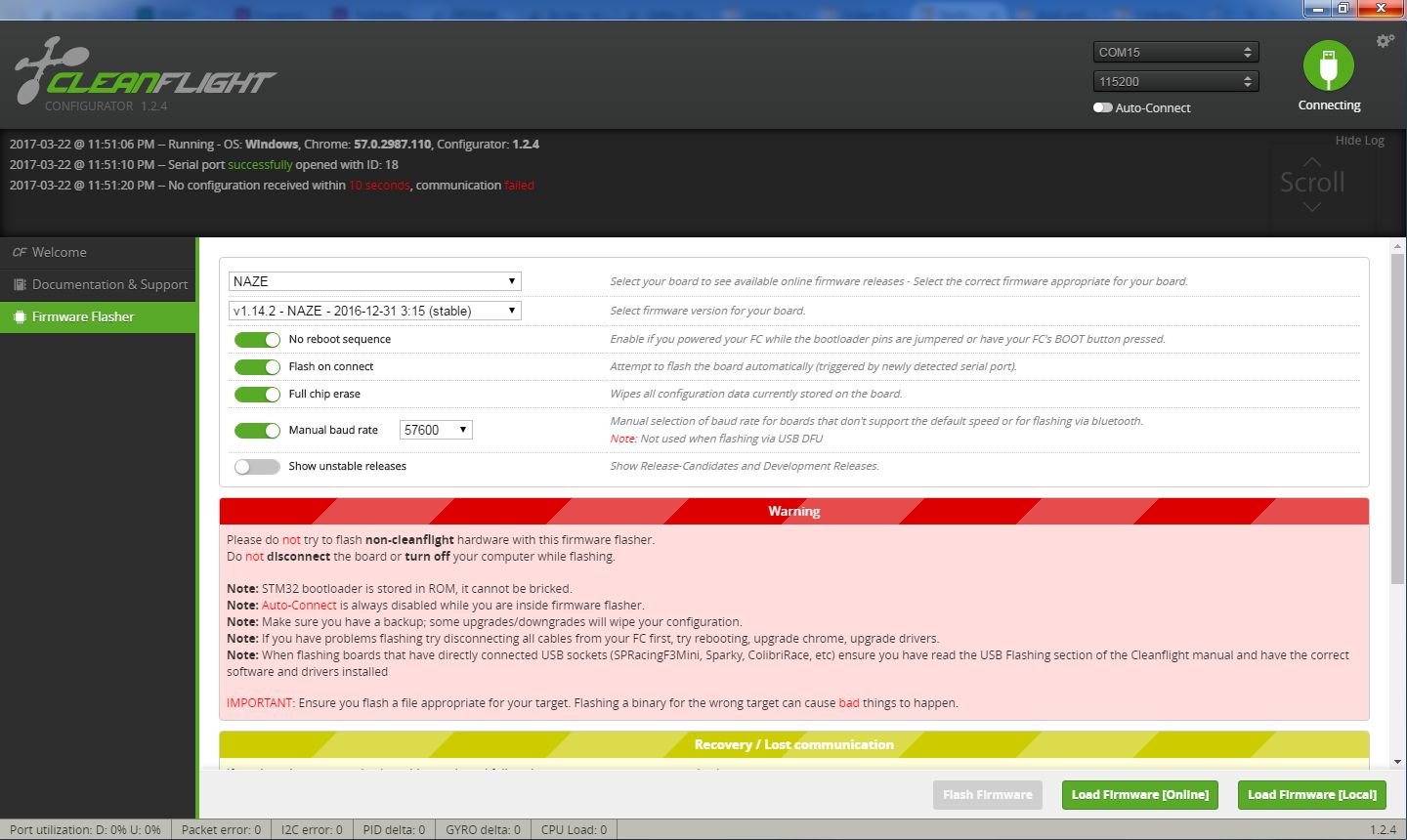
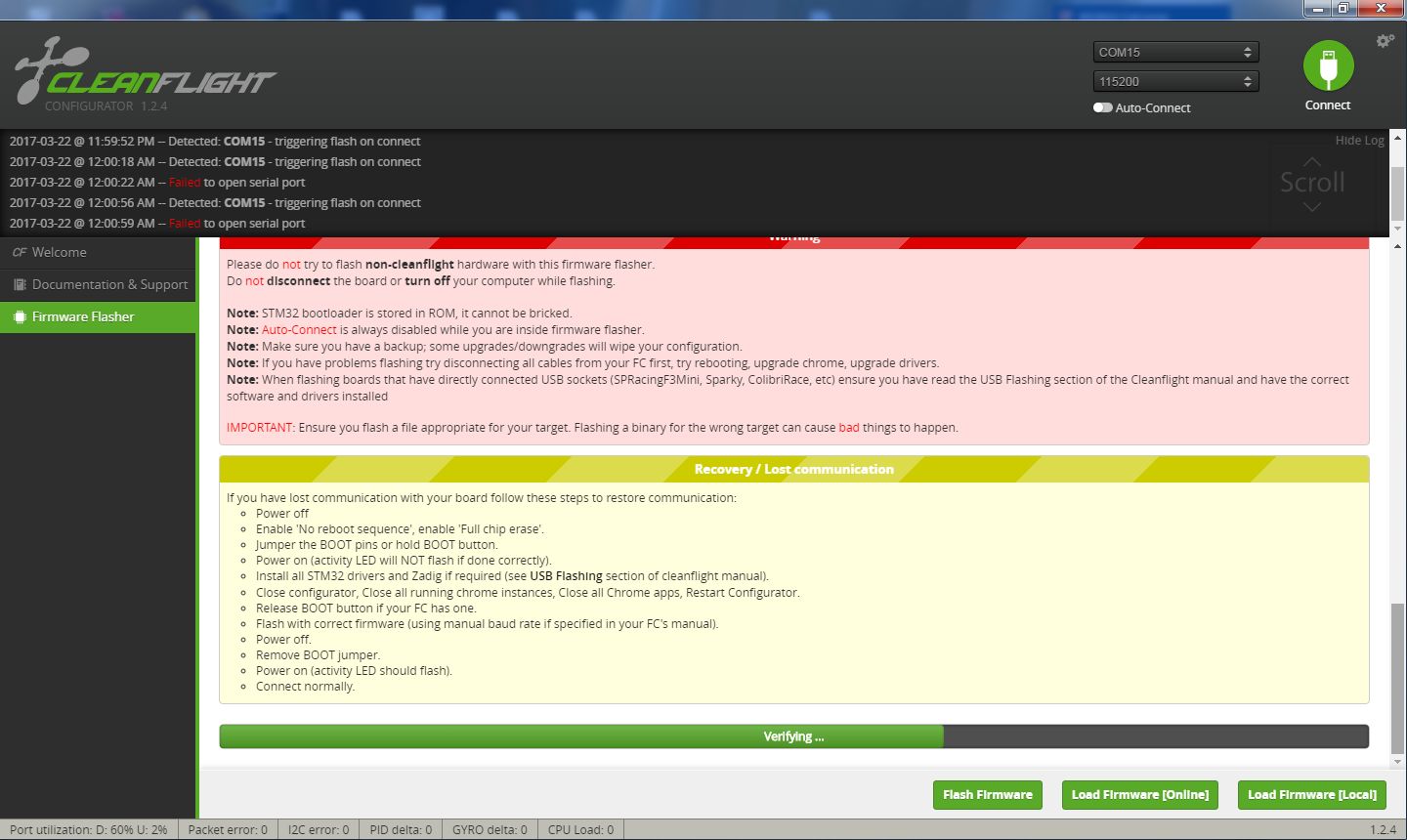
Az olcsó alaplapnak az az átka, hogy kőkörszaki CleanFlight-al szállítják. Vagy fél órámba került, mire kiderítettem, hogy mi a fészkes fenéért nem ismeri fel a Cleanflight a vevőmet. Mint kiderült, az öregebb CF-ek nem támogatják az iBUS-t és valamiért a FlySky SBUS protokollját sem, így mindenképp frissíteni kell. A frissítés pikk-pakk megtörtént. Rossz repvezérlőre.
Az bootmenüvel történő szenvedés, és egyéb nyavaják
Mivel az STM32 procicsaládnak van egy külön, felülírhatatlan bootloaderje, így nagyon nehéz gallyra vágni. Így, ha rossz firmware-t töltünk a Naze32, SP Racing F3 vagy egy F4-es csodára, simán bebootolhatjuk a masinát a gyári bootloaderrel és betölthetjük a megfelelő Cleanflightot. Ehhez annyit kell tennünk, hogy mielőtt áram alá helyeznénk a gépet, össze kell kapcsolni a két BOOT-al jelölt portot és így csatlakoztatni a PC-nkhez USB-n keresztül.
Könnyűnek hangzik, de az a rohadék drót mindig akkor mozdul el, amikor bedugnánk az USB-be. Én úgy oldottam meg, hogy a repvezérlőbe előre bedugtam a micro USB dugaszt, két kezemmel tartottam a drótot a két portra, az egyik lábammal meg bedugtam az USB kábel másik felét a PC-be. Tök egyszerű, nem? :D
Mielőtt nekiálltam jógázni, beállítottam a CleanFlight-ot így:

Mikor véremet adom a projektért
A CF szépen felment, beállítottam a masinát ahogy írtam a CF gyorstalpalóban. Csatlakoztattam az akkut, erre elindult az összes motor, az egyik prop megvágta az ujjam. Elfelejtettem egy fontos részletet. A cleanflight motor_pwm_rate alapállapota 400, azonban 500 fölötti értéknél kapcsol csak át kefés motor módba. Tehát ha a motor_pwm_rate 500 és az alatti értéken van, azonnal elindulnak a motorok, amint csatlakoztatjuk az akkut. Nekem a legjobban a 800-as érték jött be. Ezen már elég jól húz, viszont már alig-alig van villamoshangja.
A motor_pwm_rate egy érdekes változó, ugyanis ideális értéke kefés gépről kefés gépre változik. Ha túl alacsony, iszonyatosan idegesítő villamoshangot hallat a motor és a motorok sebességválozása, így a kopter mozgás nem lesz eléggé sima. Túl magas értéknél elvész a felhajtóerő és túlmelegednek a motorok. Az ólomveríébnél 600-on majdnem kifolyt a fülzsírom, viszont 3000-es értéken már alig-alig emelkedett a masina.
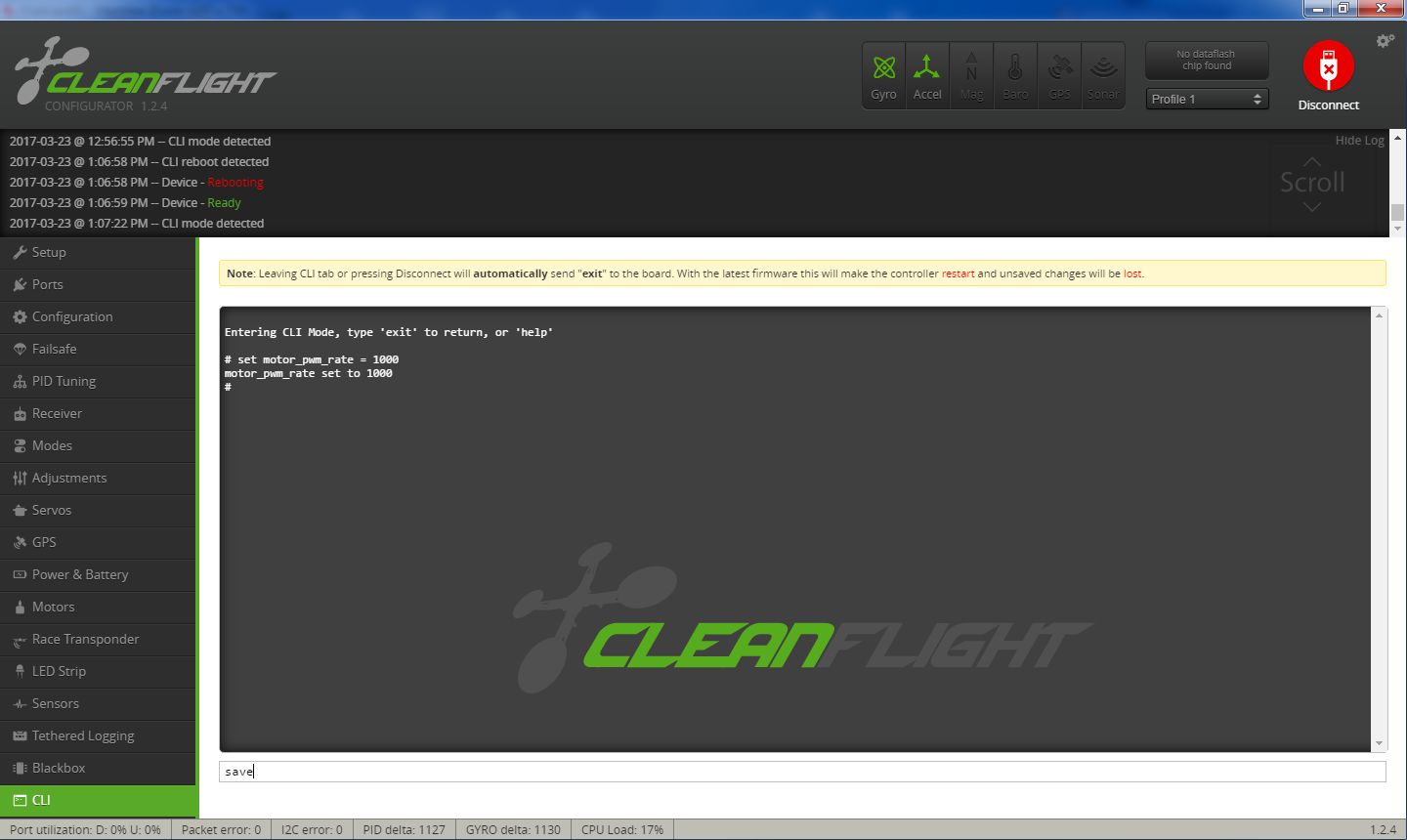
A képen a terroristák megtévesztése végett 1000 szerepel 800 helyett
Ezen kívül még le kell tiltani a motor spin-t, és mivel nem pörgetjük a motorokat, így a gáz mehet a minimumtól, azaz át kell állítani a min throttle-t 1000-re. A max throttle-t állítsuk 2000-re, mert az 1850-es alapértelmezés szintén elvesz a motork maximális teljesítményéből.
Berepülés, tapasztalatok
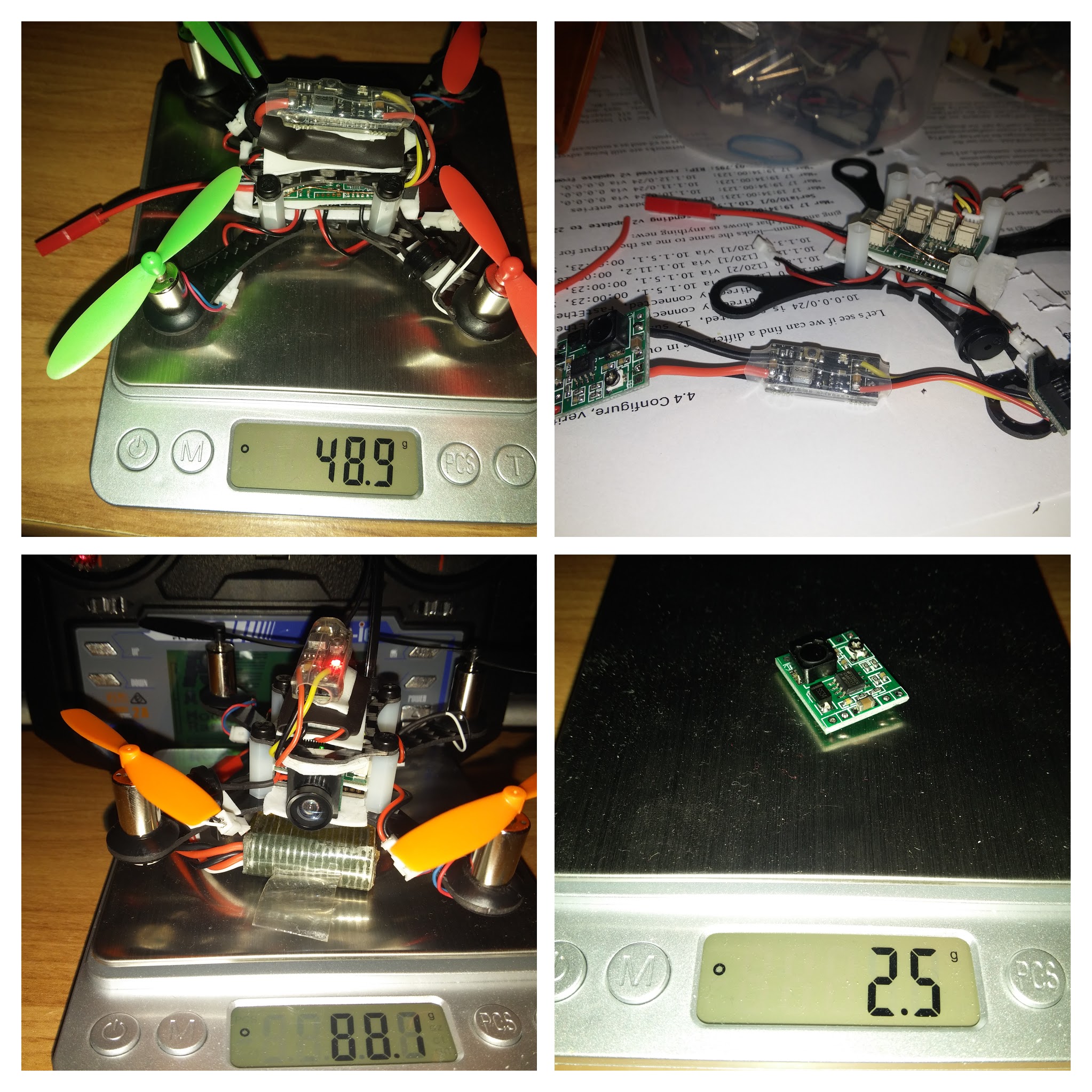
Az ólomveréb új motorokkal nagyon kezes, nagyon gyors és nagyon jól húz. Az ehhez a mérethez dögnehéz 700mAh akkuval majdnem olyan jól emelkedik mint a QX80 egycellás 600mAh akkuval. Tehát az ideális 300mAh akkuval kész rakéta lehet.
Azonban két nagy hátránya van a 2S setupnak:
A magasabb fordulaton járó motorok miatt nagyobb eséllyel repülnek le a propellerek. A megbízhatósági etalonnak számító Walkera Ladybird propellerekből az Ólomverébig összesen egy darabot vesztettem el. Az ólomverébbel hat darabot vesztettem el. Hatot, két hét, öt repült délután alatt. Egyetlen megoldás pillanatragasztóval rögzíteni a propellert a motorra és azonnal lefújni aktivátorral.
A magasabb fordulat és nagyobb feszültség sokkal nagyobb felvett áramot eredményez, ami szó szerint felzabálja a kefés motor picurka keféit. Két hét, öt szessön alatt írd és mondd, 7 (hetes, hét) motor dögött be. Ebből egy megszorult, egynek eltörött az alja, öt pedig szimplán kiégett.
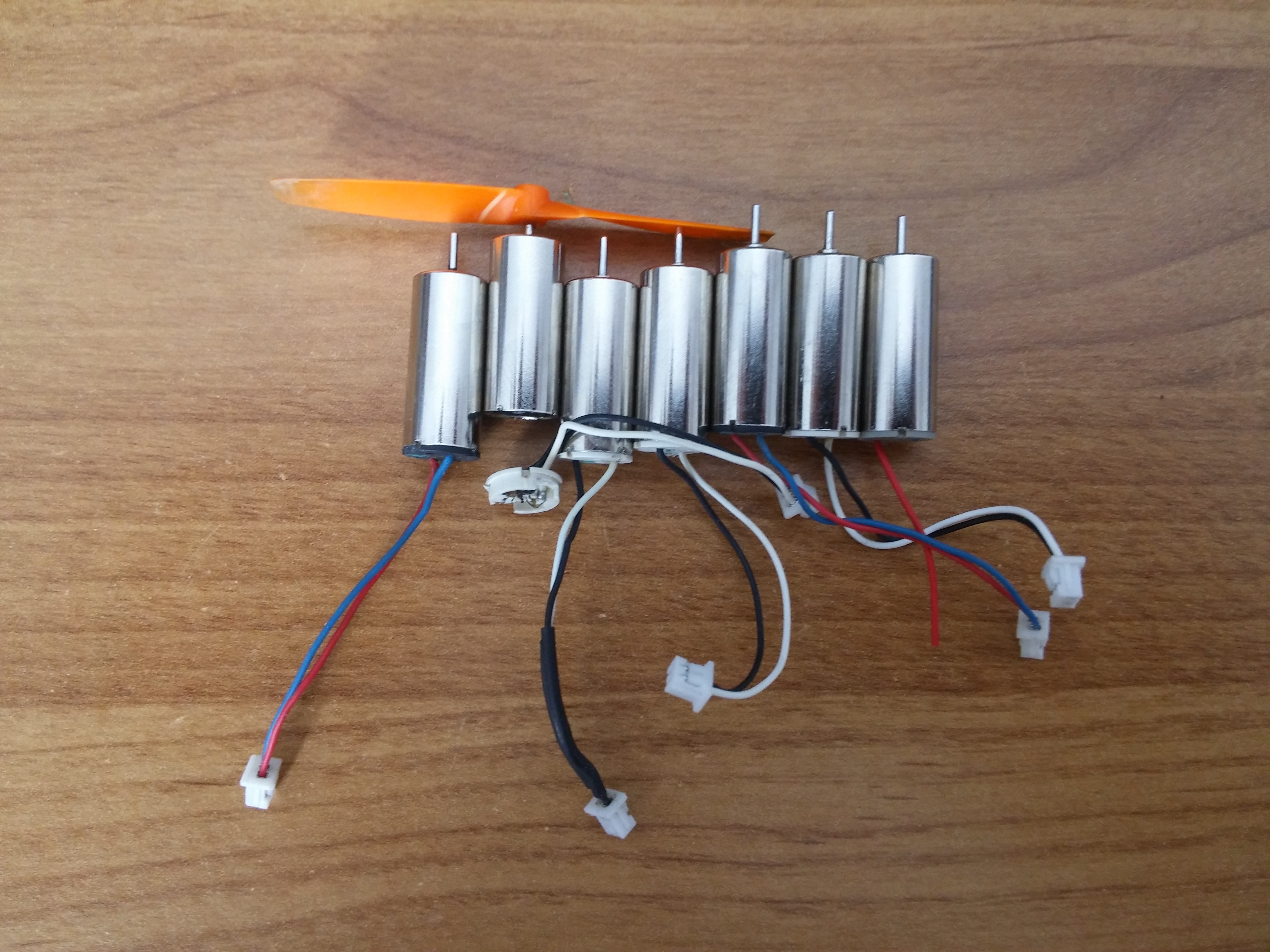
Tudom, a gép túl van terhelve, kisebb akkuval nem döglenének olyan gyorsan a motorok, de azért jól mutatja a trendeket, hogy a QX80-ban amióta csak megvan, azaz múlt ősztől csak két motor ment tönkre.
És mire elkészült ez a cikk, megjöttek a 300mAh 2S 35C Giant Power akkumulátorok és két szett 2S motor. Épp a héten tesztelem őket, de úgy látszik kezd behalni az ezer sebből vérző Eachine VR D2 FPV headsetem felvevője. :/ Nembaj, megoldom, készül az új cikk!