
JJRC X1, a varjúlábú disznó
Miért varjúlábú? Hát nézzünk az alábbi a képre. Még mindig nem? Próbáljunk vele leszállni. No, a gép túl ruganyos lába miatt pont úgy pattog, ugrál leszálláskor, mint egy parkinsonos varjú ami épp stoke-ot kapott.
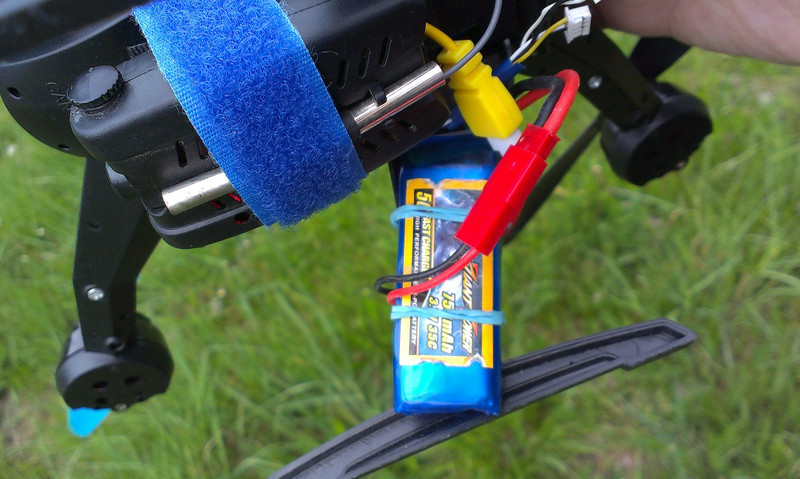
 Nyurga varjúlábak. Az a felgumizott kék izé egy akku ami az FPV szettet eteti.
Nyurga varjúlábak. Az a felgumizott kék izé egy akku ami az FPV szettet eteti.
Hogy miért disznó? Hát ezt egy régi autós legenda miatt jutott eszembe. Ugyanis pont így becézte a versenyautóját (“Big Healey”) a hatvanas években Pat Moss. Hogy miért? Mert rohadtul gyors dög volt, ám ha nem jó ívben vette az ember a kanyart, mocskosul ki tudott vele babrálni. Pont, mint a JJRC X1.

Forrás: Wikipedia.org
A gép meglepően gyors ahhoz képest, hogy csak egy 2S (7,4V) 1300mAh és 25C-s akkut hajtja. Ezt köszönheti annak, hogy nagyon könnyű a sárkányszerkezete, és brushless, azaz kefementes motorokat használ. 1806-os, 2280 kV-os motorok. Helló, ilyeneket a belépő szintű 250-es versenygépek használnak. Igaz 3S akkuval.
Ha minden igaz, ezt a gépet is etethetjük 3S akkukkal, ám ekkor az ESC-ekből könnyen kijöhet a mágikus füst, és a gép nem száll tovább. Ezért ebben az esetben érdemes valamilyen hűtést eszkábálni rájuk. Meg az sem árt, ha a 10V-os elektrolit kondikat 16-20V-osra cseréljük. Mellesleg ezek konfettit eregetnek halálukban.
A motorokon M5-ös menetű tengelyek foglalnak helyet, erre tekerhetjük fel az önzáró anyákat tizes kulccsal. Nem kell rohanni a szerszámboltba, a kulcs a csomag része. Nem árt, ha előtte felrakjuk a 6040-es propellereket. Állítólag a yaw lag orvosolható 5056 Bullnose propokkal, de erről majd később.
A vezérlőelektronika eléggé fapados, a PID-ek sincsenek ideálisra lőve, ezért sok hatás sokkhatásként éri. Elkezd gondolkozni, átlagol, aztán kilök valami outputot, közben magasságot veszt. Ez utóbbit orvosolhatjuk egy gázfröccsel a filozofálást meg finom mozdulatokkal, amiért felettébb hálás a gép. Ezen kívül tapasztalható némi késés a tengely körüli fordulásnál (yaw lag) ami messze nem olyan súlyos, mint amilyen horrorsztorikat mesélnek róla az RCGroups-on. Szerintem ez inkább a nem eléggé finomra hangolt PID hibája, mint vezérlőé. Egy-két fanatikus már dolgozik a vezérlőkód visszafejtésén, PID hangoláson, ha lesz valami fejlemény szólok.
A gépet elnézve olyan érzésem támadt, mintha nem egy kész géppel lenne dolgom, hanem egy prototípussal. Ez részben igaz is, mivel ez a JJRC első kefementes koptere. Szerencsére a legtöbb hiba eléggé gyorsan orvosolható, például:
Alacsony feszültségnél nagyon későn jeleznek a LED-ek. Ezt elég egyszerűen orvosolhatjuk egy egy-két dolcsis alacsonyfesz csipogóval (low voltage buzzer), amit az akksi balance plug-jára kötünk. Ehhez azonban ezt ki kell vezetni a gépen kívülre. Ehhez elég elcsípni az akkutakaró jobb és bal felső csücskét. Mellesleg ezután már nem kell betuszkolni az akku kábeleit, amely alapjáraton eléggé nyögve-nyelős.
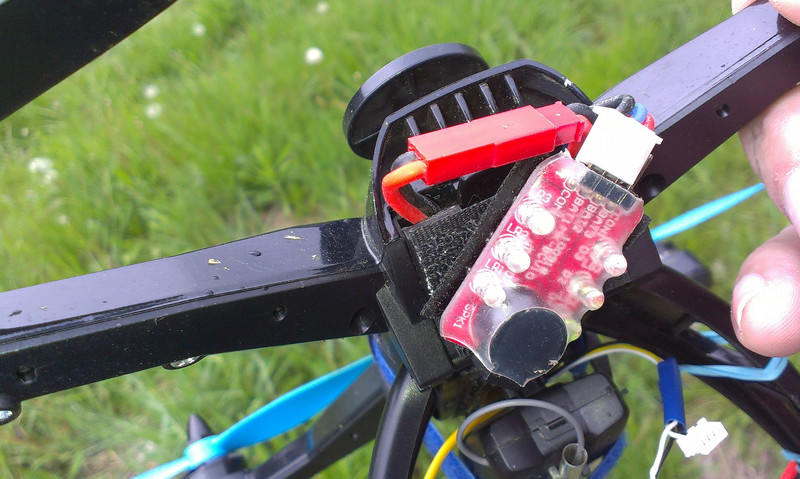 Tépőzárral rögzítettem az utólagos alacsony-feszültségjelzőt (low voltage buzzer) az akkuajtóra. Eddig még nem veszett el.
Tépőzárral rögzítettem az utólagos alacsony-feszültségjelzőt (low voltage buzzer) az akkuajtóra. Eddig még nem veszett el.
A LED-ek túl mélyen vannak és gyengék. Egy fúróval, esetleg nagyobb LED-ekkel ez könnyen orvosolható.
A varjúlábakat legjobb mindjárt lecserélni. Ahogy láthatjuk, nekem már az egyik el is törött, pedig csak pár méterről esett mezőre. Helyettesítőnek rendeltem egy V912 helitalpat.
A gép bizonytalanságát javíthatjuk 5046-os bullnose propellerekkel. Ezt egyelőre még nem tudom megerősíteni, de rajta vagyok az ügyön.
A fentiekből az jöhet le az egyszeri olvasónak, hogy nem kedvelem a gépet, pedig pont az ellenkezője igaz. Nagyon gyors, nagyon élvezetes irányítani, csak hát nem árt a gyakorlat, mert egy-két meggondolatlan manőver hatására képes eléggé érdekesen viselkedni. Például, ha nyélgázzal előre halad és mi húzunk egy satuféket hogy tolassunk, hajlamos kilencven fokkal elfordulni, és így folytatni a hátramenetelt, nem kis meglepetést okozva a gazdinak. Kis gyakorlattal könnyen orvosolható, gyakorlat nélkül rendelhetjük a következőt. Ez nem egy U807 amit vakon is el tudunk vezetni.
További előny, hogy gond nélkül lehet használni az MJX X600 akkumulátorait. Itt nemcsak az aftermarket 1000mAh akkukra gondolok, hanem a standard 700mAh-osakra is. Nem annyira tüzes, de még ezzel is lever bármilyen kefés gépet.
És milyen FPV-zéshez? Szerintem így a legélvezetesebb. Akárhányszor belekezdtem, nem bírtam abbahagyni. Legutóbb vagy másfél órán keresztül hajtottam. Egyszóval király!
A már jól ismert C4002 / Tarantula FPV kamera + adó kombót használtam a Quanum V2 headsetemmel. Szokás szerint megint öntapadós tépőzárral rögzítettem a gép aljára, majd egy “velcro strap”-pel rögzítettem. Sajnos nem tudom a magyar nevét, ha valakinek szúrja a szemét nyugodtan megírhatja. Az U807-hez viszonyítva meglepően kevés a jello a videóban, pedig a propellerek már túl voltak jó pár esésen.
 C4002 külső akkuval.
C4002 külső akkuval.
 És ezt látom én a Quanum V2-ben
És ezt látom én a Quanum V2-ben
Apropó esés. A talpon kívül a gép meglepően jól bírja a strapát. Elkaptam vele egy betonplaccot, és meg sem érezte, pedig nem karbonból van a kicsike. Not bad!
 A szél fúj, a beton vizes, de a gép még mindig tart. :)
A szél fúj, a beton vizes, de a gép még mindig tart. :)
Ezen kívül meglepően erősnek tűnik a kicsike, valószínű egy Xiaomi Yi-t is képes felemelni, de ez még tesztelésre szorul.
Általában 100 dolcsi körül vesztegetik, Banggood néha leakciózza 80-ra.
Verdikt: Amennyiben tovább akarsz lépni a kefés gépekről valami gyorsabbra, élvezetesebbre, elég gyakorlott vagy és nem ijedsz meg egy kis moddolástól, akkor vegyed, vigyed. Amennyiben nem vagy az a fúrós-faragós fajta, nem ezt a drónt keresed. :)




